基于不對稱再入體的移動質心滾動控制方法
2012-08-12 18:06:25李自行李高風
航天控制 2012年3期
李自行 李高風
北京控制與電子技術研究所,北京 100038
?
基于不對稱再入體的移動質心滾動控制方法
李自行 李高風
北京控制與電子技術研究所,北京 100038
主要研究不對稱再入體的移動質心滾動控制方法。采用移動質心控制方法可不改變再入體原有的氣動外形,具有抗燒蝕、無側噴擾流等優點。本文首先建立了移動質心系統的動力學模型和滾動控制模型;然后根據移動質心滾動控制通道具有的非線性、耦合性及時變性等特點設計了自抗擾控制器;最后,通過六自由度數學仿真驗證了移動質心滾動控制方案的可行性,并對移動質量塊的受力情況進行了分析。
不對稱再入體;移動質心滾動控制;自抗擾控制
有3種氣動外形的再入體可實現再入機動[1]:1)十字舵面外形,可通過三軸的姿態控制,達到改變控制力大小和方向的目的;2)傾斜轉彎外形,它具有兩軸控制的特性,通過控制再入體滾動一定的角度,同時控制俯仰產生升力,實現機動控制;3)滾動單通道控制外形,通過再入體的外形不對稱或質心偏移產生大小不可調節的配平升力,僅采用單通道滾動控制的方式調節升力的方向實現再入體的機動。相對于前2種氣動外形,滾動單通道控制外形的再入體氣動外形簡單而且能有效實現再入機動[2]。文獻[3]討論了滾動單通道控制外形再入體的制導和控制問題,主要研究了適用于不對稱再入體的滾轉制導律,其滾動控制采用了噴流的形式。噴流滾動控制雖然具有響應速度快的優點,但是高速再入情況下存在擾流、羽流等未知問題,基于此本文研究不對稱再入體的移動質心滾動控制方案。
采用移動質心控制方式,可不改變再入體原有的氣動外形,具有抗燒蝕、無側噴擾流等優點,因而成為近年來研究的熱點技術。它主要應用在3種形式的再入體上:自旋形式[4-5]、滾動穩定形式[6-7]和滾動單通道控制形式[8]。移動質心控制自旋再入體各通道間存在較強的氣動、控制、慣性和動力學耦合[9],滾動穩定形式一般需要多個質量塊配合且要求再入體的靜穩定度非常小[7],這給工程應用帶來了困難。滾動單通道控制的再入體只通過一個質量塊的移動來控制滾動,控制形式相對簡單,有利于工程實現,然而國內對此控制方案的研究很少。
本文首先建立了基于不對稱再入體的移動質心系統動力學模型。根據系統模型具有的非線性、耦合性及時變性等特點,設計了自抗擾控制器。通過數學仿真驗證了系統設計及控制器設計的可行性。在已知系統運動參數的基礎上,通過求解牛頓力學的第一類問題,得出移動質量塊的受力情況。
1 移動質心滾動控制系統模型
1.1 坐標系及系統結構定義
1)目標坐標系TXgYgZg
坐標原點T取設定的目標點,TXg在當地水平面內指向北為正,TYg取當地地垂線向上為正,TZg按右手法則確定。
2)再入體坐標系OXbYbZb
如圖 1所示的不對稱再入體,坐標系原點O取為再入殼體質心,OXb軸正向指向殼體前方,OYb軸在再入體縱對稱平面內與OXb軸垂直向上為正,OZb軸按右手法則確定。

圖1 移動質心滾動控制系統

1.2 移動質心滾動控制系統模型
限于篇幅,直接給出移動質心滾動控制系統的質心平動(式(1))和繞質心轉動(式(2))的動力學模型。
(1)
式(1)中Fg,Gg分別表示系統受到的氣動力和地球引力在目標坐標系中的分量形式。
(2)

為設計滾動控制器,下面推導再入體滾動通道的動力學方程。
由式(2)可得:
(3)
令:
(4)
則有:
(5)
由系統的運動學方程可得:
(6)
微分式(6)并代入式(5)整理可得:
(7)
式中:
定義為系統的非線性耦合項;

研究式(7)可知,滾動通道的動力學方程具有非線性、耦合性及時變性的特點,加上不對稱再入體再入飛行過程中各種滾動干擾力矩的影響,工程上應用比較成熟的PD控制方法很難適應移動質心滾動控制的需求。本文考慮采用自抗擾控制技術[10]設計滾動通道的姿態控制器,主要思想是不區分系統的耦合項f以及外部擾動,而把兩者統歸為未知擾動,通過擴張狀態觀測器估計未知擾動的大小并進行反饋補償,另外通過對指令信號安排過渡過程和采用非線性反饋的方法,提高系統的魯棒性。
2 自抗擾控制器設計
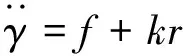
圖2為移動質心自抗擾滾動控制示意圖,其中Ga(S)代表了驅動質量塊移動的伺服機構。整個控制系統的主要特點為:
圖2 移動質心自抗擾滾動控制
1)輸入通道安排了過渡過程TD。對于指令滾動角輸入γc,有2個輸出r1和r2,其中r1按一定的策略跟蹤γc,r2提取γc的微分信號。安排過渡過程可以使控制參數適應系統的時變性,增強控制器的魯棒性;
2)反饋通道中引入了擴張狀態觀測器ESO。擴張狀態觀測器的輸入為被控對象的輸入r和輸出γ,擴張狀態觀測器提供3個輸出z1,z2和z3,其中z1跟蹤γ,z2提取γ的微分信號,z3對f和滾動干擾力矩進行估計。通過擴張狀態觀測器可以很好的估計出除控制項以外的系統動態以及系統的干擾總和,通過采用合適的補償措施,可以增強系統對目標輸入的跟蹤性能和系統的魯棒性;
3)前向通道中引入了非線性校正環節NLSF。處理后的控制輸入γc與擴張狀態觀測器的輸出做差,可得到誤差e1及誤差微分信號e2,對e1和e2進行非線性校正得到輸出u0。非線性反饋比PD控制中采用的線性反饋具有更強的抑制擾動能力。
TD的離散算法為:
(8)
(9)
(10)
h為采樣周期,rtd為控制器參數。
NLSF的離散算法為:
(11)
式中,c為控制器參數。
ESO的離散算法為:
(12)
(13)
式中,β01、β02、β03、α01、α02和δ為控制器參數。
3 仿真分析
3.1 移動質心滾動控制性能分析
采用文獻[3]給出的制導方法,本節驗證采用移動質心控制滾動通道的可行性。
圖 3給出了某條彈道中滾動角的指令曲線和實際滾動角跟蹤曲線。可以看出,采用移動質心的方法可以有效地控制不對稱再入體的滾動角。

圖3 指令滾動角及實際滾動角
圖4給出了再入飛行過程中移動質量塊的位移曲線,下圖給出了質量塊的移動速度曲線,其中質量塊的位移限幅為±0.2m,質量塊移動速度限幅為±0.5m/s。可以看出,除滾動起始階段和飛行最后階段移動質量塊的運動比較劇烈外,其余時刻移動質量塊的位移很小,移動速度也很小,這是因為不對稱再入體具有較大的法向力,很小的質心移動就能產生很大的滾動控制力矩。
圖4 質量塊位移及移動速度
令目標在以目標坐標系原點為圓心、半徑為15km的圓域內隨機分布,采用移動質心自抗擾滾動控制技術,1000條隨機彈道的落點CEP為21.5m,圖 5為相對于真實目標點的落點散布圖。
圖5 ADRC無干擾落點散布圖
考慮各項氣動力和氣動力矩系數偏差(最大偏差±10%)、風干擾、大氣密度偏差(最大偏差±10%)、質量偏差(最大偏差±2%)和質心橫移(最大偏差±2mm),各項偏差在正負最大值范圍內均勻隨機取值,圖 6為1000條隨機彈道的落點散布圖,落點的CEP為22.1m。
圖6 ADRC干擾落點散布圖
綜上可知,在文獻[3]給出的制導律下,采用移動質心自抗擾滾動控制技術能滿足制導對滾動姿態控制的需求,精確的控制落點,對各項干擾具有魯棒性。
3.2 移動質量塊的受力分析
通過彈道計算可得出移動質量塊的運動情況,進而通過求解牛頓力學的第一類問題得出移動質量塊的受力情況。限于篇幅,在此直接給出移動質量塊的受力分析公式。
(14)
當已知式(14)等號右端各項的值時,便可求出質量塊的受力情況。


圖7 移動質量塊的受力分析
此外,自旋形式和滾動穩定形式的移動質心控制技術一般把移動質量塊配置在再入體的縱軸向或產生機動控制力的方向,驅動質量塊移動,需要克服很大的慣性力作用,這對控制機構的設計造成了困難。因此從控制機構的工程化和可實現性考慮,移動質心滾動控制系統更利于工程的實現。
4 結論
滾動單通道控制外形的再入體,外形簡單并能有效實現機動。針對此類不對稱再入體的滾動姿態控制問題,研究了移動質心滾動控制方案的可行性。在建立移動質心滾動控制系統動力學模型的基礎上,根據系統動力學具有的非線性、耦合性及時變性等特點,設計了自抗擾控制器。六自由度數學仿真表明,通過合理控制移動質量塊的位移,可以很好的控制不對稱再入體的滾動角,滿足制導對滾動姿態控制的需求;此外,通過對移動質量塊的受力分析可知,在不考慮摩擦的情況下,移動質心滾動控制驅動質量塊運動的力較小,相對于其它方式的移動質心控制方式,移動質心單通道滾動控制方式更有利于工程化實現。
[1] Page J A, Rogers R O.Guidance and Control of Maneuvering Reentry Vehicles [C]//IEEE Conference on Decision and Control, California, 1977: 659-663.
[2] Anon.Generic Aerocapture Atmospheric Entry Study [R].NASA-CR-164161, 1980: 1-7.
[3] 李自行,李高風.一種基于不對稱再入體的制導與控制方法研究[J].航天控制, 2011, 29(6): 44-48.(LI Zixing, LI Gaofeng.Research on a Rolling Guidance Law of Asymmetric Reentry Vehicle [J].Aerospace Control, 2011, 29(6): 44-48.)
[4] 趙紅超, 顧文錦.變質心自旋彈頭的姿態運動建模與仿真分析[J].飛行力學,2009,7(4):50-53.(ZHAO Hongchao, GU Wenjin.Attitude Motion Modeling and Simulation Analysis of Varying Centroid Spinning Warhead [J].Flight Dynamics, 2009,7(4):50-53.)
[5] Jonathan Rogers, Mark Costello.Control Authority of a Projectile Equipped with a Controlable Internal Translating Mass [J].Journal of Guidance, Control, and Dynamics, 2008, 31(5):1323-1333.
[6] 林鵬, 周鳳岐, 周軍.基于變質心控制方式的再入彈頭控制模式研究[J].航天控制, 2007,25(2): 16-20.(LIN Peng, ZHOU Fengqi, Zhou Jun.Moving Centroid Control Mode for Reentry Warhead [J].Aerospace Control, 2007,25(2): 16-20.)
[7] Menon P K, Sweriduk G D.Integrated Guidancee and Control of Moving Mass Actuated Kinetic Warheads [J].Journal of Guidance, Control, and Dynamics, 2004,27(1):118-126.
[8] Petsopoulos T, Regan Frank J, Barlow J.Moving-mass Control System for Fixed-trim Re-Entry Vehicle [J].Journal of Spacecraft Rockets,1996, 33(1): 54-60.
[9] 賀有智.非線性預測控制在質量矩導彈姿態控制系統設計上的應用[J].戰術導彈技術,2005,(1):47-51.(HE Youzhi.The Application of Nonlinear Predictive Control to Attitude Control System Design of Mass Moment Missile[J].Tactical Missile Technology,2005,(1):47-51.)
[10] 韓京清.自抗擾控制技術[M].北京: 國防工業出版社,2008: 243-280.
The Moving Mass Roll Control Method Based on Asymmetric Reentry Vehicle
LI Zixing LI Gaofeng
Beijing Institute of Control and Electronic Technology, Beijing 100038, China
Theasymmetricreentryvehiclehasthesimpleatmosphericconfiguration.Commonly,themagnitudeofliftcannotbechangedarbitrarily.Andtherollanglecanberegulatedtoorienttheliftvectortoachievemaneuverability.Themovingmassrollcontrolmethodoftheasymmetricreentryvehicleismainlyresearched,andthemovingmasscontrolmethodhasthemeritsofnoinfluenceonthevehicleshape,withstandofablation,noatmosphericdisturbanceunderthrust.Firstly,themechanicsequationofmovingmasssystemandrollingcontrolmodelareestablished.Secondly,regardingthenonlinearity,thedynamiccouplingandtime-varyingofthemovingmassrollcontrolsystem,anactivedisturbancerejectioncontrollerisdesigned.Finally,thefeasibilityofmovingmassrollcontrolsystemisvalidatedbynumericalsimulation,andtheforceactingonthemovingmassisanalyzed.
Asymmetricreentryvehicle;Movingmassrollcontrol;Activedisturbancerejectioncontrol
2012-03-01
李自行(1982-),男,山東人,博士研究生,主要研究方向為導航、制導與控制;李高風(1941-),男,浙江人,研究員,主要研究方向為導航、制導與控制。
TJ765.3
A
1006-3242(2012)03-0023-06
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國生殖健康(2019年2期)2019-08-23 08:12:08
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
產品可靠性報告(2017年7期)2017-09-05 09:49:12