迭代制導(dǎo)情況下姿態(tài)控制系統(tǒng)穩(wěn)定性分析方法研究
2012-08-12 18:06:25王輝張宇
航天控制 2012年3期
王 輝 張 宇
北京航天自動控制研究所,北京 100854
?
迭代制導(dǎo)情況下姿態(tài)控制系統(tǒng)穩(wěn)定性分析方法研究
王 輝 張 宇
北京航天自動控制研究所,北京 100854
為了提高火箭的入軌精度和軌道適應(yīng)能力,我國在新一代運載火箭末級中采用了迭代制導(dǎo)技術(shù),俯仰、偏航程序角根據(jù)火箭運動狀態(tài)和目標(biāo)軌道參數(shù)實時變化,目前工程設(shè)計中仍按照固定程序角方式開展穩(wěn)定性分析。本文推導(dǎo)出迭代制導(dǎo)程序角與火箭速度、位置之間的線性關(guān)系式,在國內(nèi)首次提出了迭代制導(dǎo)情況下的穩(wěn)定性分析方法,并以新一代運載火箭為例進行了實例計算,結(jié)果表明此分析方法正確、可行,具有一定的參考價值。
迭代制導(dǎo);姿態(tài)控制系統(tǒng);運載火箭;穩(wěn)定性分析
傳統(tǒng)的運載火箭采用基于標(biāo)準(zhǔn)軌道的攝動制導(dǎo)方式[1],火箭沿標(biāo)準(zhǔn)彈道飛行,姿態(tài)控制系統(tǒng)的任務(wù)是跟蹤標(biāo)準(zhǔn)的程序角,根據(jù)制導(dǎo)系統(tǒng)的導(dǎo)引和指向要求進行姿態(tài)控制,在此條件下,火箭的姿態(tài)運動可以看作標(biāo)準(zhǔn)彈道附近的小擾動運動,因此,穩(wěn)定性分析具有以下特點[2]:火箭姿態(tài)運動可獨立于質(zhì)心運動進行設(shè)計和穩(wěn)定性分析;姿態(tài)控制系統(tǒng)根據(jù)標(biāo)準(zhǔn)彈道計算的運動方程系數(shù)進行穩(wěn)定性分析;小擾動穩(wěn)定性能夠代表火箭姿態(tài)運動的穩(wěn)定性。
近年來,隨著我國在探月工程、載人工程、空間站工程和深空探測工程方面的不斷深化,對運載火箭的入軌精度和軌道適應(yīng)能力提出了更高的要求,我國在新一代運載火箭末級飛行中,大都采用了迭代制導(dǎo)技術(shù)。
國外在多個型號中體現(xiàn)了迭代制導(dǎo)概念,如美國的“土星”火箭、歐空局的“阿里安”火箭均采用了迭代制導(dǎo)技術(shù),并取得了良好效果[3],但其是否進行了穩(wěn)定性分析、如何進行穩(wěn)定性分析等沒有相關(guān)資料介紹。國內(nèi)的中國運載火箭技術(shù)研究院、西北工業(yè)大學(xué)和國防科技大學(xué)等進行了迭代制導(dǎo)技術(shù)方面的研究,但對迭代制導(dǎo)情況下的穩(wěn)定性分析沒有開展研究,目前,在迭代制導(dǎo)飛行段,姿態(tài)控制系統(tǒng)的穩(wěn)定性只是通過數(shù)學(xué)仿真和半實物仿真進行時域驗證。本文從迭代制導(dǎo)核心公式出發(fā),經(jīng)過嚴(yán)格的公式推導(dǎo),獲得迭代制導(dǎo)情況下的姿態(tài)控制系統(tǒng)穩(wěn)定性分析方法,并以新一代運載火箭為例進行了實例計算。
1 迭代制導(dǎo)技術(shù)
迭代制導(dǎo)技術(shù)源于最優(yōu)控制理論,以燃料最省為性能指標(biāo),通過控制關(guān)機時間和推力方向,滿足火箭的終端約束條件[4]。它是根據(jù)火箭當(dāng)前的運動參數(shù)和目標(biāo)軌道參數(shù),實時計算火箭的俯仰和偏航程序角。迭代制導(dǎo)與傳統(tǒng)攝動制導(dǎo)不同的是:攝動制導(dǎo)程序角是飛行時間的函數(shù),且在發(fā)射前事先確定;而迭代制導(dǎo)程序角是在飛行中實時計算,與火箭的速度和位置相關(guān),飛行中姿態(tài)和攻角變化較大,一般不宜在大氣層內(nèi)采用,而且,在迭代制導(dǎo)終點附近,由于“需要繼續(xù)飛行時間”和“需要增加速度”都接近于0,會引起迭代結(jié)果的迅速變化,甚至導(dǎo)致迭代發(fā)散,為此,需要在臨近終點前停止迭代計算(大約在發(fā)動機關(guān)機前10s)[1]。由于程序角的計算是實時的,隨迭代制導(dǎo)的計算周期循環(huán)進行,因此,在迭代制導(dǎo)飛行段,姿態(tài)控制系統(tǒng)必須重點關(guān)注以下幾點:
1)姿態(tài)控制系統(tǒng)必須同時考慮穩(wěn)定性和快速性:由于程序角在飛行中實時變化,姿態(tài)控制系統(tǒng)除了穩(wěn)定性要求外,還必須保證一定的快速性,確保及時準(zhǔn)確地跟蹤程序角;
2)程序角會出現(xiàn)“跳躍”現(xiàn)象:在接通迭代制導(dǎo)時刻、運載火箭特性變換時刻(如級間分離等),程序角可能會出現(xiàn)較大的變化(10°~20°的“大跳躍”),制導(dǎo)系統(tǒng)必須進行程序角速度限幅,姿態(tài)控制系統(tǒng)必須設(shè)計濾波網(wǎng)絡(luò),確保程序角平滑過渡;
3)在穩(wěn)定性分析時考慮迭代制導(dǎo)程序角:迭代制導(dǎo)是根據(jù)火箭運動狀態(tài)和目標(biāo)軌道參數(shù)進行最優(yōu)計算,姿態(tài)角偏差為姿態(tài)角與迭代制導(dǎo)程序角之差,因此,姿態(tài)角偏差與火箭的質(zhì)心運動狀態(tài)密切相關(guān),穩(wěn)定性分析時必須加以考慮。
2 迭代制導(dǎo)程序角線性化
定義軌道坐標(biāo)系,原點O為地心,Oη軸為地心指向入軌點的方向,Oξ軸在軌道平面內(nèi)指向飛行方向,Oζ軸與Oη,Oξ軸構(gòu)成右手坐標(biāo)系。
由于迭代制導(dǎo)大多為非線性計算公式,因此,需要對其進行線性化,其任務(wù)就是確定迭代制導(dǎo)程序角與火箭速度、位置之間的線性關(guān)系式。
2.1 迭代制導(dǎo)計算公式
以目標(biāo)軌道3個速度和2個位置參數(shù)為目標(biāo)量,推導(dǎo)出軌道坐標(biāo)系內(nèi)俯仰、偏航程序角[3]為:
(1)

(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
其中:ΔWξ,ΔWη,ΔWζ為所需的視速度增量在ξ軸,η軸,ζ軸的分量;dη,dζ為所需的位置增量在η軸,ζ軸的分量;Sp,S2,Qp,Q2,Lp,L2,Ip,I2為標(biāo)準(zhǔn)積分項。
到發(fā)動機關(guān)機時刻,剩余時間的計算公式為:
(10)
其中:ΔT′為修正關(guān)機預(yù)估時間,計算公式為:
(11)
其中:τ2為質(zhì)量完全燃燒的時間;U2為發(fā)動機等效比沖。
2.2 俯仰通道線性化
則在發(fā)射慣性坐標(biāo)系內(nèi):
(12)
(13)
2.3 偏航通道線性化
則在發(fā)射慣性坐標(biāo)系內(nèi):
(14)
(15)
2.4 程序角線性化
在慣性坐標(biāo)系內(nèi),俯仰程序角增量可表示為:
(16)

(17)

(18)
(19)
3 迭代制導(dǎo)情況下的穩(wěn)定性分析
傳統(tǒng)上,迭代制導(dǎo)飛行段姿態(tài)控制系統(tǒng)穩(wěn)定性分析原理如圖1所示。
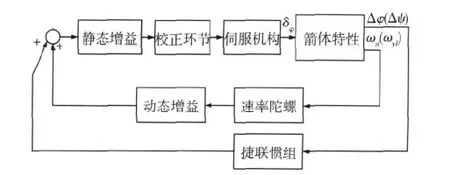
圖1 傳統(tǒng)的迭代制導(dǎo)情況下姿態(tài)控制系統(tǒng)穩(wěn)定性分析原理框圖
俯仰、偏航通道的控制方程如下:
(20)
已知在迭代制導(dǎo)飛行段:
(21)
其中:φ,ψ為俯仰、偏航通道姿態(tài)角;φcx0,ψcx0為俯仰、偏航通道彈道程序角;Δφcx,Δψcx為俯仰、偏航通道迭代程序角增量。
結(jié)合(20)、(21)式,則俯仰和偏航通道的控制方程可以寫成如下形式:
(22)
將(18),(19)式代入(22)式,則得到:
(23)
令:
則有:
(24)
經(jīng)過整理,得到如下公式:
(25)

已知,姿態(tài)控制系統(tǒng)通過捷聯(lián)慣組敏感角速度,經(jīng)過四元數(shù)計算獲得姿態(tài)角,通過速率陀螺敏感箭體角速度,箭載計算機實現(xiàn)姿態(tài)角偏差+角速度控制規(guī)律。在此基礎(chǔ)上,增加迭代制導(dǎo)程序角線性環(huán)節(jié),可得到迭代制導(dǎo)模式下的姿態(tài)控制系統(tǒng)穩(wěn)定性分析原理框圖,如圖2所示。姿態(tài)控制系統(tǒng)據(jù)此開展穩(wěn)定性分析工作。
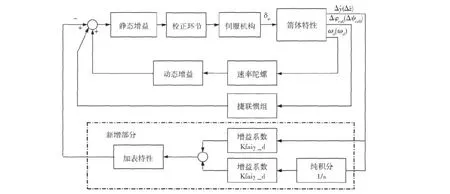
圖2 迭代制導(dǎo)模式下姿態(tài)控制系統(tǒng)原理框圖
4 實例計算
在運載火箭末級飛行過程中,迭代制導(dǎo)接入時刻、關(guān)機前結(jié)束迭代制導(dǎo)時刻以及組合制導(dǎo)修正時刻,程序角都有一定程度的跳躍,因此,需要選取這些特征秒點進行穩(wěn)定性分析。以新一代運載火箭末級1600s為例,通過第2節(jié)公式計算出kφy_d=0.0015,kφy=4E-7,不加入導(dǎo)引和迭代制導(dǎo)、加入迭代制導(dǎo)、加入導(dǎo)引3種情況下頻域綜合如圖3所示。頻域圖中包括了箭體特性、慣組特性、伺服機構(gòu)特性、控制增益和校正網(wǎng)絡(luò),是俯仰通道整個開環(huán)系統(tǒng)的頻域綜合圖。
圖3 迭代制導(dǎo)閉合情況下俯仰通道1600s額定狀態(tài)頻域綜合圖
從圖中可以看出:姿態(tài)控制系統(tǒng)剛體、晃動和彈性均穩(wěn)定,剛體和晃動具有大于35°的相位裕度,彈性具有大于57dB的幅值裕度。頻域中加入迭代制導(dǎo),低頻部分的幅值和相位發(fā)生較大變化,則對增益和校正網(wǎng)絡(luò)設(shè)計增加了約束;在中高頻,幅值和相位變化較小。加入迭代制導(dǎo)與加入導(dǎo)引的幅值變化趨勢相同,低頻幅值降低,因此,在穩(wěn)定性分析時考慮迭代制導(dǎo)程序角,需按上述方法進行計算和分析。
5 結(jié)論
迭代制導(dǎo)實時生成俯仰、偏航程序角,此程序角與火箭的速度和位置密切相關(guān),因此,姿態(tài)角偏差也與火箭的速度和位置相關(guān),對姿態(tài)控制系統(tǒng)的穩(wěn)定性有一定影響。本文從迭代制導(dǎo)核心公式出發(fā),推導(dǎo)出程序角與速度、位置的線性化關(guān)系式,提出了迭代制導(dǎo)情況下的穩(wěn)定性分析方法,并以新一代運載火箭某一秒點為例,說明了迭代制導(dǎo)閉合對姿態(tài)控制系統(tǒng)頻域的影響。該方法成為在迭代制導(dǎo)情況下進行姿態(tài)控制系統(tǒng)穩(wěn)定性分析的理論支撐,有一定的參考價值。
[1] 茹家欣.液體運載火箭的一種迭代制導(dǎo)方法[J].中國科學(xué)E輯:技術(shù)科學(xué), 2009, 39(4):696-706.
[2] 徐延萬,余顯昭,王永平,等.導(dǎo)彈與航天叢書控制系統(tǒng)(上)[M].北京: 宇航出版社, 1989.
[3] 陳新民,余夢倫.迭代制導(dǎo)在運載火箭上的應(yīng)用研究[J].宇航學(xué)報, 2003, 24(5): 484-489.(CHEX Xin-min, YU Meng-lun.Study of Iterative Guidance Application to Launch Vehicles[J].Journal of Astronautics, 2003, 24(5): 484-489.)
[4] 吳楠,程文科,王華.運載火箭迭代制導(dǎo)方法的改進研究[J].動力學(xué)和控制學(xué)報,2009, 7(3): 279-282.(Wu Nan, Cheng Wenke, Wang Hua.An Improved Iterative Guidance Method for Launch Vehicle.Journal of Dynamics and Control, 2009, 7(3): 279-282.)
[5] 李華濱,李伶.小型固體運載火箭迭代制導(dǎo)方法研究[J].航天控制, 2002, 20(2): 29-37.(LI Huabin, LI Ling.Iterative Explicit Guidance for Small Solid Launch Vehicle.Aerospace Control, 2002, 20(2): 29-37.)
The Research on Stability Analysis of Attitude Control System in the Case of Iterative Guidance
WANH Hui ZHANG Yu
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Aimingattheimprovementofin-orbitprecisionandorbitadaptability,theiterativeguidancetechnologyisadoptedinnewgenerationlaunchvehicleofChina.Thepitchandyawprogramattitudeanglesarechanged,whicharebasedonlaunchvehiclemovementstatesandtargetorbitparametersinrealtime,butthestabilityanalysisisstilldevelopedaccordingtotheformoffixedprogramattitudeanglesintoday’sengineerdesign.Inthispaper,thelinearrelationfunctionsofiterativeguidanceprogramanglesandlaunchvehiclevelocityandpositionarededuced,andthemethodofstabilityanalysisinthecaseofiterativeguidanceispresentedfirstlyinChina.Then,thecalculationexampleofnewgenerationlaunchvehicleisdemonstrated.Theresultsindicatethattheanalysismethodiscorrectandadvisable,whichhasfairreferencevalue.
Iterativeguidance;Attitudecontrolsystem;Launchvehicle;Stabilityanalysis
2011-08-31
王 輝(1978-),男,陜西渭南人,高級工程師,主要研究方向?qū)Ш健⒅茖?dǎo)與控制;張 宇(1982-),女,哈爾濱人,工程師,主要研究方向?qū)Ш健⒅茖?dǎo)與控制。
V448.22
A
1006-3242(2012)03-0007-05
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
人大建設(shè)(2019年12期)2019-05-21 02:55:44
電子制作(2018年18期)2018-11-14 01:48:24
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
環(huán)球時報(2017-03-30)2017-03-30 06:44:45
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22