自由立體顯示背光系統的設計*
2012-08-08 06:53:52張瑞雪王元慶范科峰
照明工程學報 2012年2期
張瑞雪 王元慶 范科峰
(1.南京大學電子科學與工程學院,江蘇南京 210093;2.中國電子技術標準化研究所,北京 100007)
1 引言
立體顯示技術可以真實地重現客觀世界的景像,表現圖像的深度感、層次感和真實性[1]。常見的實現立體的方式有視差立體、體立體和全息立體。從技術性能以及可行性角度分析,綜合考慮工藝性和可預期的未來市場需求,基于視差原理的立體顯示方式是相對現實可行的方法。視差立體顯示方式可以根據是否需要觀看者佩戴眼鏡、頭盔等輔助工具,分為輔助式立體顯示和無輔助式立體顯示,即自由立體顯示。
LED被稱為第四代照明光源或綠色光源,具有節能、環保、壽命長、體積小等特點[2]。此外,LED還具備平面光源的特性,有優異的亮度均勻性;在色彩表現力和色階過渡方面,也有顯著的優勢。LED正逐步取代冷陰極熒光管 (CCFL),成為新一代液晶顯示器 (LCD)背光源。
本文提出了一種以LCD為基礎的平面兼容自由立體顯示器背光設計方案,配合觀看者的運動,操控LED背光改變立體窗口的空間位置,使3D影像也隨著移動,實現自由立體顯示,同時與平面顯示兼容。
2 系統的工作原理
視差立體顯示的關鍵是使左右眼分別觀察各自的一幅圖像,即實現“分像”[1]。為實現這一效果,我們在LCD的奇數行和偶數行分別顯示左右圖像,水平、垂直位置各不相同的一對光源經過特殊的光學部件后分別照亮屏幕的奇/偶行,并在屏幕前形成互不干擾的、分別只能看到左/右圖像的視域[3],如圖1所示。此外,當出現多個觀察者時,背光可以為每個觀察者提供獨立的視域,保證多個用戶可以同時觀看到立體效果,圖1為有A、B兩個觀察者的情況。
當觀察者移動時,上位機的人眼跟蹤模塊檢測到觀察者眼睛的位置并發送至下位機,后者控制更新LED陣列點亮的位置,保證始終為觀察者提供正確的視域。
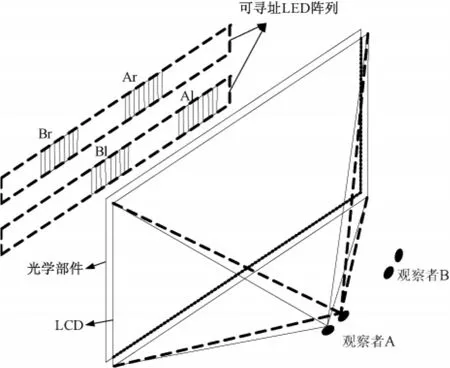
圖1 立體顯示的原理
在平面顯示模式下,兩組LED陣列全部點亮,LCD的顯示內容為平面圖像或文字。觀察者的雙眼可以同時觀看到整個屏幕,如同普通的顯示器。
3 系統硬件設計
3.1 可尋址LED陣列
可尋址LED陣列由高亮平面式白光LED等間距排列而成,工作電壓3.3V,正常工作電流20mA。采用共陽極驅動,恒流驅動芯片選擇16通道恒流LED驅動器MBI5026,數據以串入并出的方式傳送,每一列LED的亮暗都可以獨立控制,如圖2所示。
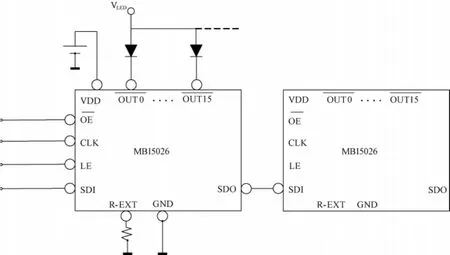
圖2 LED驅動模塊的原理圖
每組LED陣列的工作狀態由固定格式的數據更新。例如如下的一組數據:03H、09H、05H、25H、10H、40H、08H,將使得LED陣列的狀態變為第09H~0DH、25H~34H、40H~47H列點亮,其余列熄滅。
3.2PWM調光
IRF7410是一款常用的P溝道MOS場效應管。該器件的最大工作電流ID為-16A,開啟電源VGS(th)最大值為0.9V[4,5]。圖3為PWM調光的原理圖,PWM信號由單片機產生,低電平期間IRF7410導通,VLED≈Vcc,高電平期間IRF7410截止,VLED≈0。
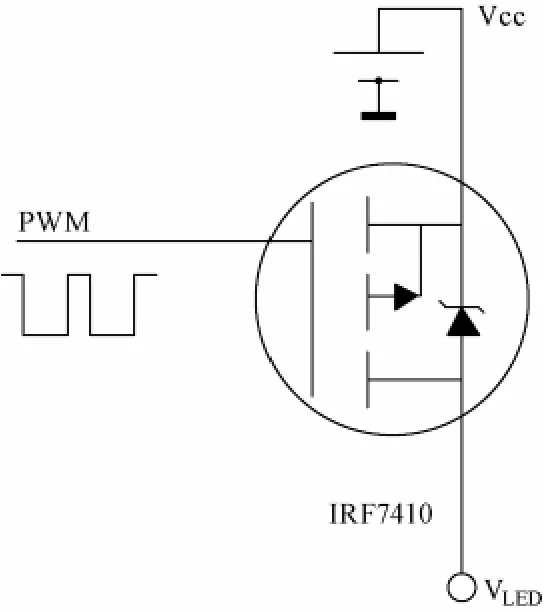
圖3 PWM模塊的電路圖
3.3 主控制器的選擇
AVR單片機是增強型內置FLASH的RISC(Reduced Instruction Set CPU)精簡指令集高速8位單片機,硬件采用哈佛 (Harward)結構,達到一個時鐘周期可以執行一條指令,絕大部分指令都為單周期指令[6]。ATmega128是MEGA系列中性能最好的一款,具有如下特點:128K字節的系統內可編程Flash、4K字節的EEPROM、4K字節的SRAM、53個通用I/O口線、32個通用工作寄存器、4個具有PWM功能的定時器/計數器、兩路UART通訊口。單片機工作電壓5V,在與上位機通信的過程中,需要采用MAX232來完成TTL電平和RS232電平之間的轉換。
4 軟件設計
下位機程序完成對LED陣列的控制,并通過串口與上位機通信。主程序實現對系統的初始化,包括端口設置、中斷設置、串行口工作方式選擇、系統各種變量的初值裝入。初始化完成后,系統進入默認的立體工作模式,等待中斷信號的到來。
外部中斷請求信號INT0來自模式選擇硬件開關電路,中斷服務程序用于切換工作模式。若系統工作在立體模式,則關閉PWM功能,打開串口,等待串口中斷的到來;若系統工作在平面模式,則關閉串口,向驅動電路輸出全“1”數據,點亮全部LED,并開始 PWM調光,如圖 4所示,其中,PWM信號由OC0(PB4)引腳輸出。TC0工作在相位修正PWM模式,計數器雙向計數,在升序計數時發生比較匹配將清零OC0,降序計數時發生比較匹配將置位OC0,高電平占空比由比較匹配寄存器OCR0的值與計數器上限值 (0xFF)之比決定。通過PWM調光,使得顯示器在平面模式下具有一個合適的亮度,從而使觀察者獲得較好的觀看體驗。
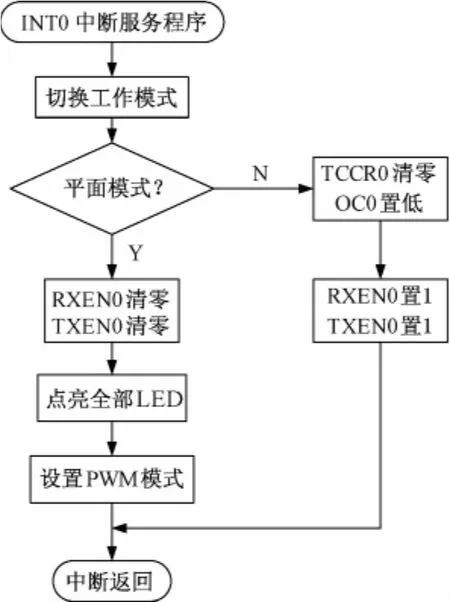
圖4 INT0中斷服務程序流程圖
串口通信僅發生在立體模式下,用于接收上位機發來的人眼位置信息,及時刷新LED陣列中需要點亮的位置,以實現可視區域的隨動。給上下位機設置適當的通訊協議是保證上下位機能正常通訊的基礎[7]。系統采用全雙工異步通訊模式,通訊協議設置如下:波特率采用115200bps,數據格式采用8位數據位,1位起始位,1位停止位。握手協議采用軟件實現上下位機的握手,上位機要往下位機發送數據時,先發送一個請求發送的握手信號:FFH;下位機收到后回發一個允許發送的應答信號:FEH,表示已經做好數據接收準備,上位機收到應答信號后開始發送數據。作為一個實時系統,當發生通信故障時,上位機不斷發出請求信號,直到收到下位機的答復后,才將當下最新的人眼位置數據發出。
5 實驗
實驗中采用LG-PHILIPS的17寸液晶屏LM170E01,分辨率 1280×1024,有效顯示面積338mm×270mm,顯示內容選擇NASA的航拍視差圖像對。LED采用寧波升譜光電有限公司的SS-170WW-06G,外形尺寸為2.0mm×1.25mm×1.1mm,發光強度為320mcd,每組LED陣列包括256列,亮度2.6×104cd/m2。在屏幕前490~550 mm的位置處獲得良好的立體效果,在屏幕前300~1000mm的范圍內有良好的平面效果,立體視角±25°,平面視角±40°。選擇屏幕的5個典型區域,如圖5所示,在暗室條件下測量單人立體模式下的光照強度,左圖為只有該區域純白、其余全黑的圖片,右圖為全黑圖片,觀看距離550mm。此外,還測量了左圖全白、右圖全黑的情況,具體數據見表1。照度計使用臺灣泰仕公司的TES-1336A,傳感面積0.0652m2。同時,選擇Viewsonic時分立體顯示器vx2268wm進行對比測試,測量透過液晶眼鏡后的光照強度,即人眼觀看到的照度,具體數據見表2。
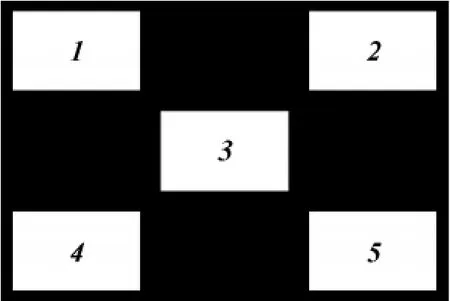
圖5 顯示面板上的5個典型區域

表1 立體模式光照度
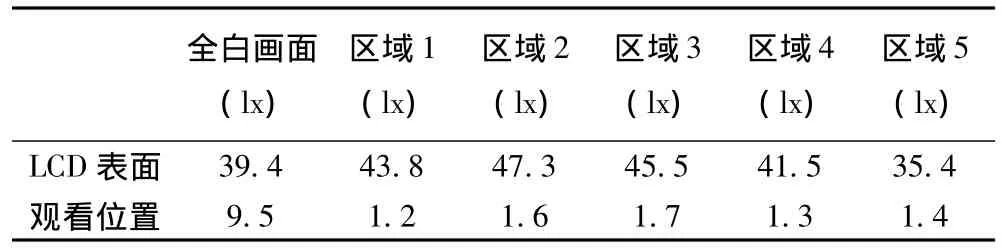
表2 vx2268wm光照度
從表1、表2中可以看出,在LCD表面進行測量時,光照強度與顯示區域的大小無關,vx2268wm的出射光通量約是實驗樣機的7倍。在觀看位置處,照度計接收到的光通量為屏幕上各個區域出射光通量的疊加,對于vx2268wm,由于要保證較大的視角范圍,光照度減小至 (9.5/39.4)×100%=24.1%;對于實驗樣機,由于光學部件的水平匯聚作用和垂直展開作用,從LCD出射的光線在人眼位置處形成寬65mm、高約1m的光帶,其余地方沒有光照。忽略近距離光傳播的衰減,人眼觀看到的理想照度E=6.5×(338/65)×(270/1000)=9.126lx,由于光學部件不理想等原因,實際照度為5.6 lx。
實驗結果表明,本系統達到了市場化立體顯示器的亮度水平,且有不錯的亮度均勻性。同時,配合現有的上位機人眼檢測模塊,系統的總體反應速度約為30ms,主要包括人眼檢測算法執行的時間、串口數據傳輸的時間和單片機更新LED陣列的時間。
6 結語
立體顯示是一門新興的、有著廣闊應用前景的技術,兼容性是立體顯示器的主要技術指標。本文所介紹的頭跟蹤式自由立體顯示器,基于一種可尋址LED陣列照明技術,通過與特殊的光學部件的配合,可以獲得良好的立體效果,同時,還可以顯示平面圖像。作為一臺原理型樣機,該系統還存在一些可以改進的地方,下一步的研究將圍繞縮短反應時間、壓縮系統結構等進行。
[1]孫超.幾種立體顯示技術的研究 [J].計算機仿真,2008,25(4):213~217.
[2]賈冬穎.基于STC單片機LED智能照明系統的設計[J].照明工程學報,2010,21(2):71~73.
[3]汪洋,王元慶.多用戶自由立體顯示技術 [J].液晶與顯示,2009,24(3):434~437.
[4]宋飛,胡世平,姚信安.基于LT1641的雙路熱插拔電路設計 [J].電子元器件應用,2008,10(4):4~7.
[5]常玉臣,郭其一.基于Modbus協議的液晶顯示控制模塊設計[J].工業儀表與自動化裝置,2010,(1):48~51.
[6]徐振方,孟艷花,王艷.基于AVR單片機的LED顯示屏控制系統的研究 [J].照明工程學報,2010,21(2):77~80.
[7]廖平,陳峰,馬洪秋.Delphi環境下PC機與AVR單片機的串行通訊[J].現代電子技術,2008,(2):123~125.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
