孤島式風光柴蓄智能微網系統的研制
2012-07-26 05:45:54趙建東楊磊劉文輝
電網與清潔能源 2012年5期
關鍵詞:系統
趙建東,楊磊,劉文輝
(北京交通大學機械與電子控制工程學院,北京,100044)
伴隨著當前世界經濟快速發展,環境問題和能源危機也在日益突顯,已經成為了人類所面臨的重大威脅之一。在這種情況下,風能、太陽能、生物質能、地熱能等新能源發電方式成為研究的熱點,其中風能和太陽能這2種取之不盡、用之不竭的清潔、可再生資源更是受到人們的青睞。近些年來,對于這些新型能源利用的研究也在不斷地深入。
隨著新型技術的研究應用,尤其是電力電子接口技術和現代控制理論的快速發展,新能源的利用也在不斷進步。微網系統采用分布式電源和負荷一起作為配電系統的子系統,既能夠和大電力系統并網運行發電,又可以獨立對用戶供電,成為可再生能源利用較好的一個解決方案[1-2]。孤島式微網是規模較小的分散的獨立系統,基本單元一般由分布式電源、儲能裝置、控制系統及電力負荷組成,可以提供穩定可靠的電能,適合邊遠地區和大電網無法直接到達區域的獨立供電[3-4]。
1 孤島式智能微網系統
孤島式智能微網系統可方便地利用新型能源,由于風光資源的天然互補性,可以很大程度上節省蓄電池組的電量[5],因此系統對風能和太陽能采取綜合利用。孤島式智能微網系統的典型結構如圖1所示,整個系統有能量產生環節、能量存儲環節、能量消耗環節和控制中心和上位機5部分組成。其能量的產生環節又分為風力發電、光伏發電、柴油機組發電以及其他可利用的交流發電設備(預留,可擴展);能量儲存環節為蓄電池;能量的消耗一般主要由直流負載、交流負載2個部分組成;控制中心主要負責系統的整體運行控制,包括系統運行狀態的監測、蓄電池的保護功能、負載的運行控制以及柴油機的啟停控制信號,保證整個發電系統穩定、可靠地運行;上位機的作用是實時將采集的數據輸出,可以查看整個系統的工作狀態,并將數據保存,便于對系統工作狀況進行性能分析。
系統運行要求為滿負荷負載功率500 W,平均每天連續運行10 h。因此,配置參數為400 W/24 V的風力機,480 W/24 V的太陽能電池,1 kW的柴油機。
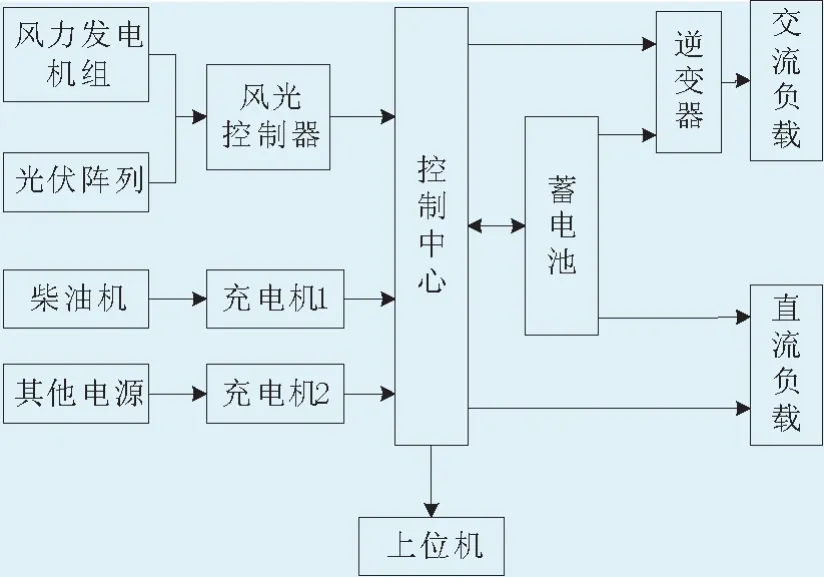
圖1 孤島式智能微網系統結構圖Fig.1 Structure of the islanded intelligent microgrid system
2 系統研制
根據孤島式智能微網系統的整體組成結構,進行了系統方案設計、系統硬件電路設計、系統軟件研發工作。
2.1 基于單片機的控制方案設計
根據控制系統功能的分析,選用Atmega16單片機控制系統,系統的總體設計思路分為硬件和軟件兩大部分,其總體的基本結構框架如圖2所示。
2.2 控制系統硬件設計
由控制系統功能需求可知,控制系統的硬件電路設計主要分為以下幾部分。
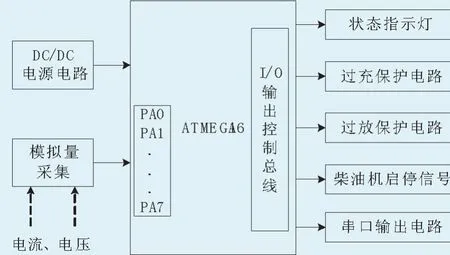
圖2 微網控制系統結構圖Fig.2 Structure of the micro-grid control system
1)MEGE16及其擴展電路,包括復位、電源、晶振等;
2)模擬信號輸入電路,MEGA16提供了8通道、10通道A/D轉換器,需要將模擬量轉換為單片機可接受的范圍;
3)工作狀態顯示電路,顯示包括光伏和風力發電機以及蓄電池的狀態(過充、正常、過放);
4)保護電路,對蓄電池的過充和過放保護;
有數據顯示,在美國每天就有5億支吸管被遺棄(這意味著每人每天大約1.5支的消耗量)。有專門負責清理海灘垃圾的環保組織在一項研究中聲稱,美國各地的海灘上每年廢棄的吸管大約有75億支之多。
5)串口輸出電路,控制系統需要對各部件狀態的數據進行分析,以評價整個微網系統的性能。
2.3 控制系統軟件設計
系統控制輸出對象是兩級負載和柴油機啟停信號,實現的主要功能是蓄電池的充放電保護控制和柴油發電機的調度。具體控制方案如圖3所示。
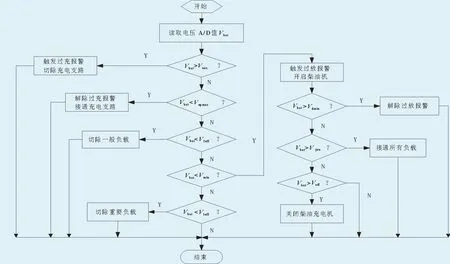
圖3 系統整體運行策略圖Fig.3 Operation strategy of the system
控制程序是基于能量調度的方法,應用SOC(State of Charge)設置策略,根據蓄電池所處狀態,來對整個微網控制系統進行控制的。程序在各個時間給出的設置值可以是不同的物理量,每個設置值的給出,取決于時間和邏輯判斷。結合微網供電系統的運行控制策略分析,控制程序算法如下:以蓄電池端電壓和各支路的電流為控制參數,設定特定的狀態值,根據被控參數在被控系統運行期間的變化劃分為幾個工作狀況,分別做出相應的動作進行控制調節。
2.4 系統樣機研制
根據系統接線圖進行了實際樣機組裝,其外形如圖4所示,并對樣機各部分功能進行了聯調,重點對控制系統的控制策略進行了調試,包括關鍵控制參數的校正和運行控制策略的實驗。

圖4 孤島式智能微網系統樣機Fig.4 Prototype of the islanded intelligent micro-grid system
3 樣機試驗
樣機集成后,分別做負載投切試驗、穩定性試驗和超負荷試驗,并分析了整個微網發電系統樣機的運行性能。
3.1 負載投切試驗
負載的投切對供電電壓的影響同負載的功率有關,這是供電系統的運行特性決定的,其中對電壓影響最明顯的是蓄電池的工作狀態,因此實驗關閉所有充電支路,在蓄電池正常運行的狀態下,分別選擇60 W、120 W、420 W不同大小的交流負載。其中420 W負載投入切出實驗過程如圖5所示。
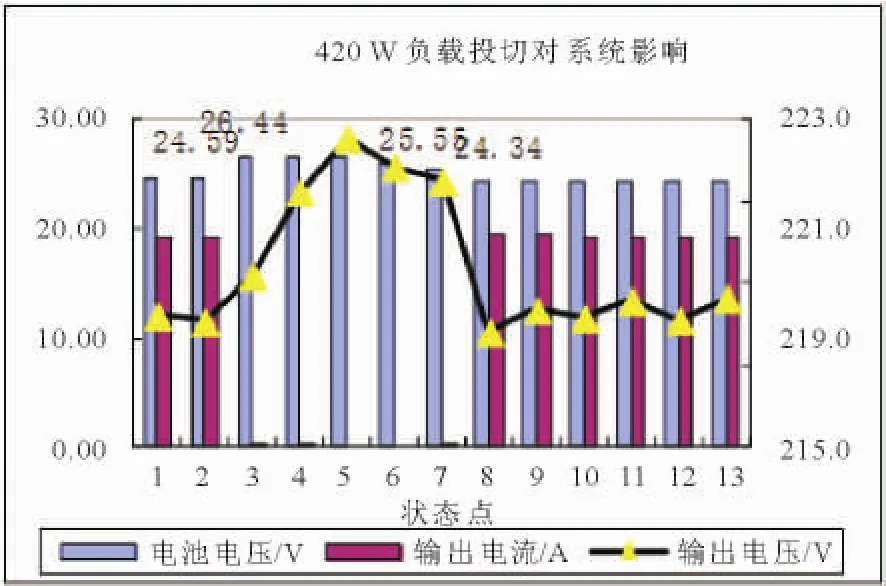
圖5 420 W負載投切實驗圖Fig.5 Switching the 420 W load experiment
由圖5可以看到,初始狀態接入420 W負載,在狀態3切出負載時,蓄電池電壓由24.59 V升高到26.44 V,電壓升高了1.85 V,接近于切出和投入負載的設定值區間,雖然在允許的范圍內,但是考慮到系統的安全性,不建議接入的一般負載超過420 W;輸出電壓從218.1 V升高到219.2 V,在狀態8重新投入負載時,輸出電壓從221.5降低到217.8,因為負荷接近逆變器滿負荷,因此瞬時電壓變化較大,但是處于3%精度內,負載可以正常工作。
3.2 穩定性試驗
基于控制策略的可行性,對系統做了連續運行試驗,進一步考察系統的穩定性。實際試驗運行時間為172 h,負載功率為120 W,在系統試運行期間,多為日照良好無風天氣,對于有風的天氣只取到了一個時段的數據。圖6描述了微網系統在一天內24 h的運行情況。
1)安裝地點的冬季可利用日照時間是6個小時,在日照充足的情況下,風光發出的電能可以完全滿足負載的用電需求,同時對蓄電池充電;
2)在風光不足的情況下,即在晚上的時候,系統的發電量不能滿足負載的需求,蓄電池對負載供電,蓄電池端電壓有所下降;
3)蓄電池端電壓變化范圍均在正常狀態下。
3.3 超負荷試驗
為了試驗微網系統在超負荷運行下的性能以及柴油充電機的實際運行狀況,設計了900 W交流負載實驗,一般負載為420 W,重要負載為480 W。圖7描述了實驗中系統風光充電電流、柴油機充電電流、負載工作電流以及蓄電池的運行曲線。
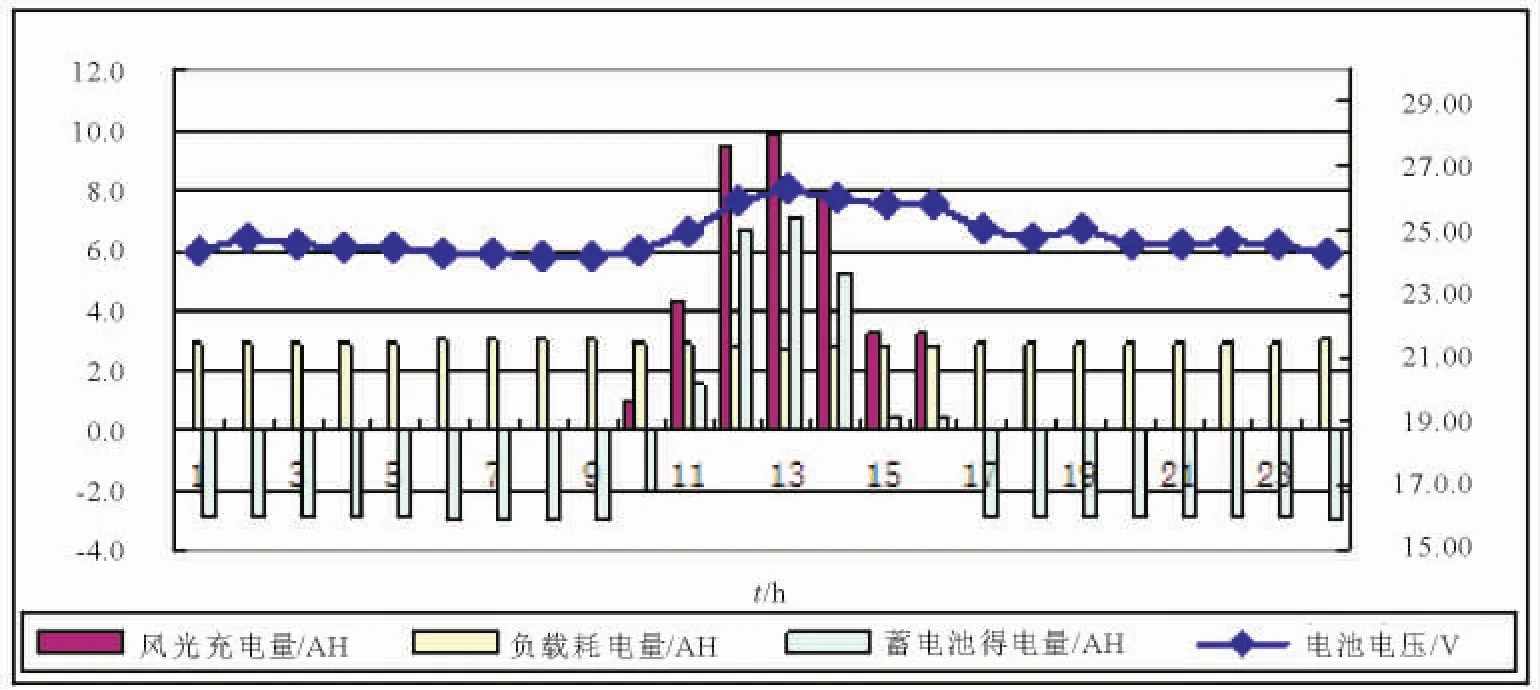
圖6 系統24小時逐時實驗數據圖Fig.6 Experimental hourly data of the system in 24 h
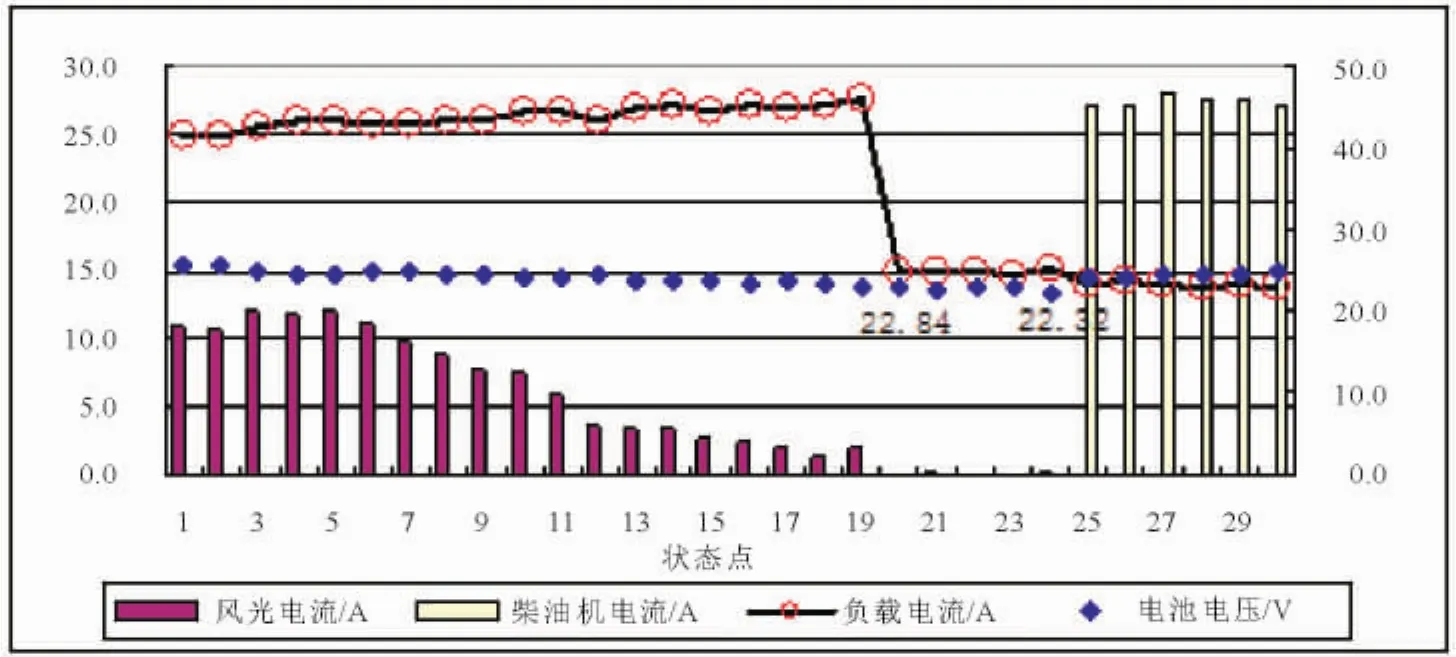
圖7 系統超載實驗電流數據圖Fig.7 Current data of the overload
從圖7中可以看出整個實驗過程分為3個階段:
1)工作狀態1到20:負載正常運行,耗電量一部分來自風光發電,一部分由蓄電池提供,而且由于無風且光照強度不斷降低,蓄電池端電壓趨于下降趨勢。
2)工作狀態21到23:在狀態21時,Vbat=22.84 V,低于一般負載切斷電壓V2off=23 V,因此一般負載切斷,保留重要負載正常運行,從圖中可以看到,負載電流從45.8 A降低為24.7 A。
3)工作狀態24到29:在狀態21時,Vbat=22.32 V,低于實驗設定柴油機啟動值Vmin=22.5 V,此時開啟柴油充電機,從圖中可以看出,在狀態25時柴油機充電電流為27.0 A,并在后續工作狀態中保持穩定,由于柴油機充電電流大于負載耗電電流,因此柴油充電機有多余能量供給蓄電池充電,可看到蓄電池端電壓有緩慢上升,這就保證了重要負載的正常工作。
綜上所述,系統的連續運行能力良好,負載穩定可靠運行,供電電壓精度達到實際用電需求。
4 結論
本文基于風光柴蓄設計開發了孤島式智能微電網系統樣機,通過聯調測試和多種試驗,驗證了樣機工作的穩定性和可靠性。目前,該孤島式微網發電系統已正常投入使用達10個月之久,完全滿足實際運行要求。
[1]魯宗相,王彩霞,閔勇,等.微電網研究綜述.電力系統自動化[J].2007,31(19):100-106.LU Zong-xiang,WANG Cai-xia,MIN Yong,et al.Overview on microgrid research[J].Automation of Electric Power Systems,2007,31(19):100-106(in Chinese).
[2]胡成志.分布式電源接入系統的研究[D].重慶:重慶大學,2007.
[3]趙宏偉,吳濤濤.基于分布式電源的微網技術[J].電力系
統及其自動化學報,2008,20(1):121-128.ZHAO Hong-wei,WU Tao-tao.Review of distributed generation based micro grid technology[J].Proceedings of the CSU—EPSA,2008,20(1):121-128(in Chinese).
[4]商執一.風光柴蓄復合發電系統建模與仿真技術研究[D].北京:北京交通大學,2010.
[5]茆美琴,風光柴蓄復合發電及其智能控制系統研究[D].合肥:合肥工業大學,2005.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32