一種星載微型凝視式可見光CCD遙感器設計
2012-07-18 06:56:42張鏡洋常海萍沈為民
航天返回與遙感 2012年2期
張鏡洋常海萍沈為民
(1南京航空航天大學高新技術研究院,南京 210016)
(2南京航空航天大學能源與動力學院,南京 210016)
(3蘇州大學現代光學所,蘇州 215006)
1 引言
世界航天遙感技術蓬勃發展,在對地觀測上取得了豐碩的成果[1]。無論是光譜分辨率[2]還是空間時間分辨率上航天遙感技術都取得長足的進步。基于空間碎片和空間武器對空間飛行器的威脅,空間態勢感知和空間攻防方面的研究逐步深入,并成為世界各國的研究焦點,該領域對航天星載遙感技術提出了對空間動態目標偵查的新應用需求,它要求星載遙感設備能夠結合低慣性小衛星指向靈活、軌道機動的特點,形成對空間目標快速捕捉、動態跟蹤的能力[3]。這就要求星載遙感設備具備短積分時間、高幀頻的特點,并且能夠適應小衛星平臺集約化、低功耗的設計要求[4]。
本文以對空間動態目標成像應用為背景[5],設計了適應小衛星平臺的微型凝視式可見光CCD遙感器。該遙感器采用了單幅積分時間短的凝視式成像方式,采用LVDS差分并行傳輸的高幀頻圖像傳輸模式。為適應小衛星平臺需求,該遙感器采用折反式光學系統、部分國外工業級器件的集約化設計。文中首先對其光學系統和電子電路集約化設計特點和性能進行闡述,并設計了其可靠性保證技術路線,通過力學環境、模擬空間環境試驗驗證該技術路線可行性;最后通過性能測試,該可見光遙感在奈奎斯特頻率(Nyquist)處靜態MTF>0.2,信噪比>49,對設計動態目標MTF>0.16;該遙感器的研制為空間動態目標成像提供支持,其集約化的設計方法和可靠性保證技術路線為輕小型載荷的研制探索了新的思路。
2 某星載微型凝視式CCD遙感器光學系統及電子電路設計
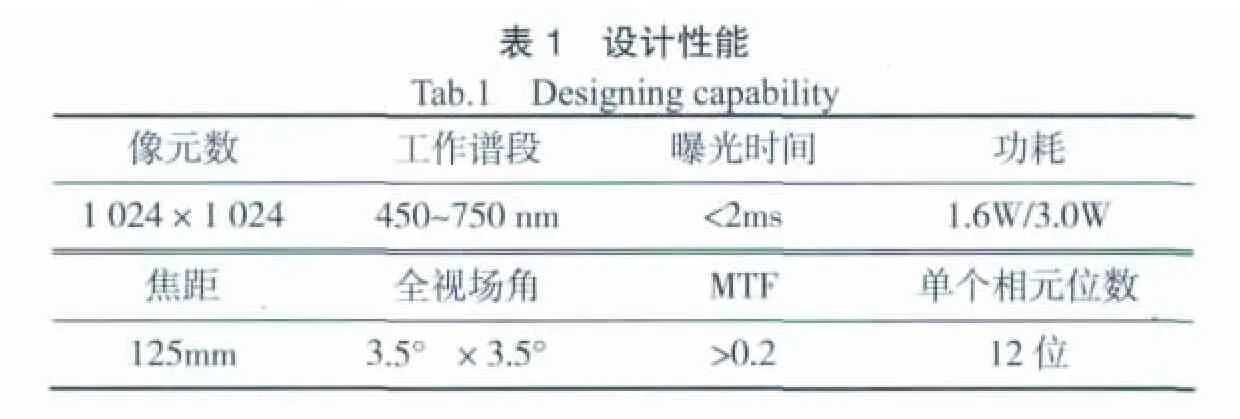
某星載遙感器研制目標是通過在軌實驗驗證其凝視式成像模式對地面或空間動態目標的成像效果。其主要性能參數見表1。為適應小衛星平臺對載荷集成化、集約化設計。該遙感器設計主要特點如下:第一、采用折反式的光學系統,工作溫度寬泛,光學系統小,光焦度相對較高,有效F數為3.4,焦距125mm;第二、采用大量國外工業級器件經過嚴格的篩選和器件級環境試驗,電子電路體積小,功耗低,遙感器總質量小于2kg,峰值功耗小于3W;第三、采用凝視式成像模式和面陣CCD,單幅積分時間短,單幅積分時間小于2ms;第四、采用LVDS差分并行數據接口,傳輸速率快,轉移時間短,幀頻大于10Hz。以上特點均適用于資源有限的小衛星平臺,并利于捕捉隨機的動態目標。圖1為微型凝視式CCD遙感器組成原理圖。
?
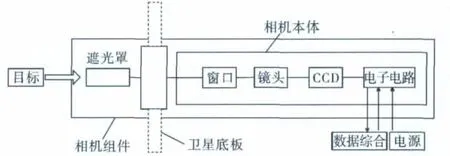
圖1 可見光遙感系統組成Fig.1 Buildup of remote sensor with visible light
(1)光學系統
CCD遙感器采用折反式光學系統[6],如圖2所示,由兩塊窗口、一塊主反射鏡、四塊透鏡、一塊兼作透鏡和次反射鏡的透鏡組成。遠處目標被光學系統成像在焦平面探測器CCD處。此光學系統的主要優點包括:結構緊湊、色差小、溫度適應性強、相對孔徑大、采用球面元件、成像品質接近衍射極限。光學系統的調制傳遞函數(MTF)如圖3所示,在CCD取樣Nyquist頻率67線對/mm處的MTF值高于0.65。相對畸變曲線如圖4所示,相對畸變值為0.091%,如圖4,與近軸像高相比高5μm,不到一個像元。經計算,溫度水平變化±12℃時,在CCD Nyquist頻率(67線對/mm)處的MTF值下降約0.1。在0.65的MTF下溫度變化對光學系統成像性能的影響較小。折反式光學系統成像品質受環境溫度較小,且小光學系統溫度梯度小,特別適用于熱控能力弱的小衛星。
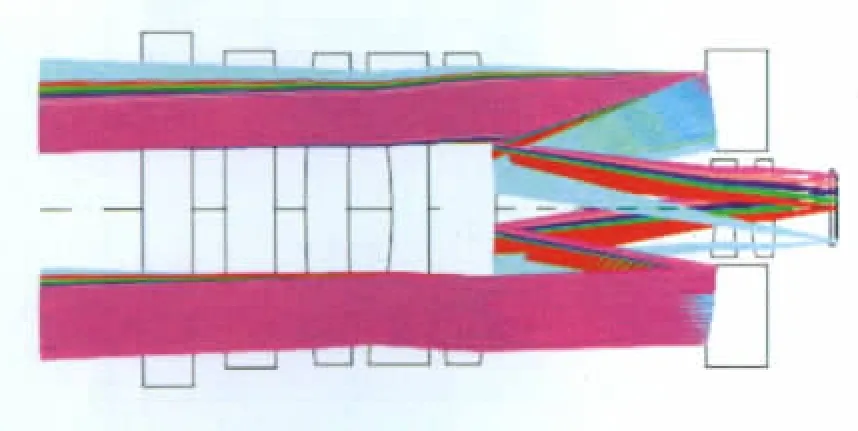
圖2 光學系統及光路Fig.2 Optical system and light path
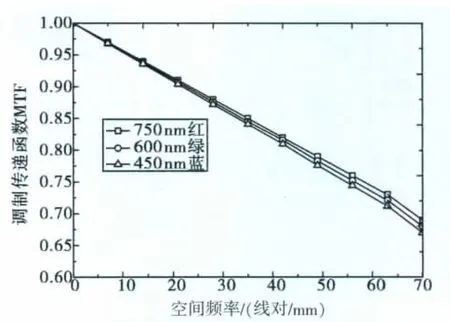
圖3 光學系統MTF曲線Fig.3 MTF curve of optical system
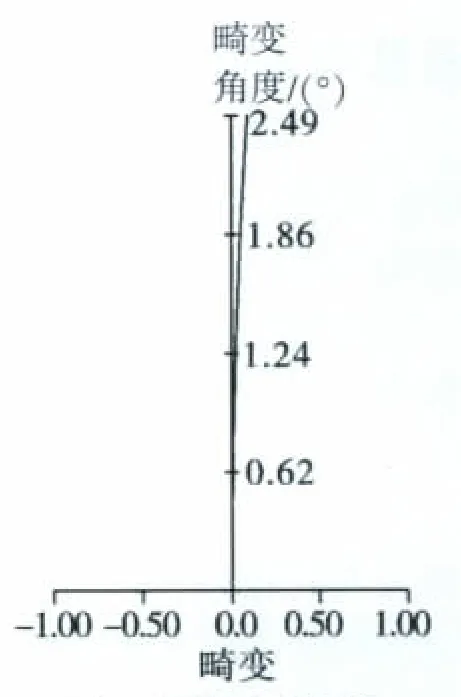
圖4 相對畸變曲線Fig.4 Relative aberration curve
(2)電子電路
CCD遙感器電子電路原理如圖5所示,由面陣CCD芯片、時序信號發生器、信號處理電路和A/D轉換、數字視頻信號接口電路、DC/DC電源、監控等功能模塊構成。CCD在有效脈沖的驅動和控制下,實現光生電荷的收集、轉移、儲存,最后以序列的方式將像元信號逐個輸出。采用DALSA公司HQ級的FT-18面陣幀轉移CCD,其外形和電路組成如圖6所示。時序信號發生器為CCD芯片提供一組嚴格的工作有效時序驅動脈沖,時序信號由FPGA芯片產生,采用VHDL語言作為開發FPGA的工作平臺。該芯片還同時輸出信號處理電路所需的控制信號,如鉗位、采樣/保持、同步、及數字視頻傳輸等脈沖。設計中采用Altera公司工業級的EP2C5T144I8和配置芯片EPCS4SI8。信號處理電路處理CCD輸出的視頻信號,經過鉗位、采樣/保持、CDS(雙相關采樣)、可編程增益放大PGA、A/D轉換等處理后,輸出12bit寬度的數字視頻信號。設計中采用ADI公司工業級的AD9945視頻ADC電路。數字視頻信號接口電路采用12位并行傳輸模式,將A/D輸出的LVTTL數字視頻信號轉換成LVDS格式的數據。設計中采用TI公司的SN55LVDS31四路驅動芯片。DC/DC電源模塊輸入外電源電壓+12V,為遙感器提供+1.2V、+3.3V、+5V、+10V、+22V內部電源,采用BOOST/BUCK型開關電源與LDO低壓差等電源轉換電路。監控模塊用MCU實時監控遙感器的工作狀態,接受衛星數據綜合系統的工作指令,以電平的下降沿為觸發信號,衛星數據綜合系統的輸出為OC門輸出,上拉電阻設置在遙感器端。CCD遙感器與衛星數據綜合系統之間的數據接口界面和邏輯關系見圖5。數據接口信號均采用LVDS邏輯電平傳輸,信號分為幀、行、位三個同步信號和12位數據信號,并行傳輸實現高碼率。
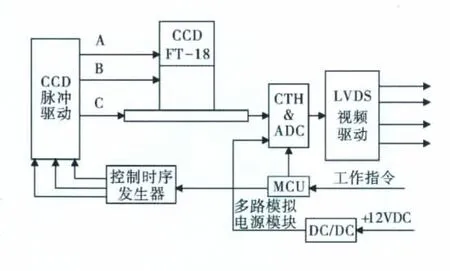
圖5 電子電路構成Fig.5 Block diagram of electronic circuit
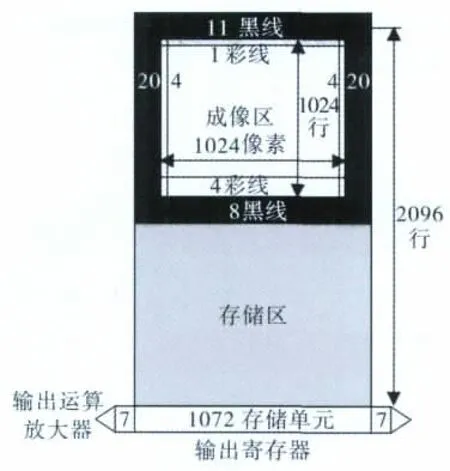
圖6 FT-18幀轉移CCDFig.6 FT-18 CCD with frame transfer
3 某星載微型凝視式CCD遙感器可靠性保證
為了適應小衛星空間、質量、能源的局限,其載荷應該具備體積小、質量輕、功耗低的特點,因而為實現集約化和集成化設計,本文所設計的星載微型面陣CCD遙感器大規模采用集成度高、體積小、功耗小的國外工業級器件,并進行整體防輻射和散熱設計。為保證其可靠性,本文參照國內外對選用目錄外元器件的措施,制定了元器件可靠性保證技術路線,并通過整機環境實驗進行驗證。下文分別通過元器件級可靠性保證措施和整機環境試驗來描述該技術路線。
(1)元器件級可靠性保證措施
該CCD遙感器部分元器件按照航天級元器件選用目錄選用,部分選用國外工業級器件的科學級元器件,對國外工業級器件進行破壞性物理分析(DPA)、補充篩選實驗、單板級環境實驗保證其元器件可靠性。DPA主要包含實驗項目分為4類:CCD、CCD插座、塑封器件、共模扼流圈,根據不同器件類型和國軍標《GJB4027A-2006軍用電子元器件破壞性物理分析方法》制定了不同的實驗分析項目,該階段為抽檢,抽檢器件是否合格作為采購同一批次器件的合格判據。DPA合格的器件進行補充篩選,進一步考核其電性能等特性,此階段為全檢。全部考核合格后,根據電性能設計制成測試電路,進行單板實驗,單板實驗主要針對國外工業級器件經受空間熱環境和粒子輻照環境其電路組成的電性能能否滿足設計要求,主要實驗項目包括:高低溫循環、熱真空(此前兩相均在鑒定級實驗條件基礎上±5℃)和粒子輻照實驗(按壽命累計總劑量+30%)。實驗中監測單板電性能參數變化,如果電性能無變化則元器件和單板設計通過考核。
(2)整機環境試驗
整機環境試驗主要是考核CCD遙感器經受運載火箭給予的振動環境、空間粒子輻照環境、空間熱環境、空間紫外輻照環境等能力,以及其電磁兼容性,主要實驗項目有:地面溫度試驗、高低溫熱循環試驗、熱真空試驗、電磁兼容性試驗、粒子輻照試驗、鏡頭玻璃紫外輻照試驗以及力學的正弦振動、隨機振動、沖擊、加速度試驗等實驗項目,經鑒定級和驗收級試驗考核,本文所設計的輕小型面陣CCD遙感器均能通過以上試驗項目。
4 星載微型面陣CCD遙感器成像性能驗證
CCD遙感器鏡頭正樣產品的MTF采用Optest光學測試系統測量,照明光源分別采用550nm綠光和400~900nm寬波段光源,測量誤差小于0.03。鏡頭靜態MTF在Nyquist頻率處大于0.6,滿足設計要求。整機測試的成像性能靜態指標主要包括遙感器靜態MTF、視場角,其中遙感器的靜態MTF測試結果如表2所列,靜態MTF在Nyquist頻率67線對/mm處能夠達到0.2以上,從圖7中可以看出CCD遙感器可以清晰分辨出16線對,其信噪比大于49。此外,CCD遙感器進行了動態成像測試和數值模擬,數值模擬中窗口與待測目標速度距離比模擬在軌速高比,曝光時間2ms內相對位移為0.2~2個像元,整機MTF大于0.16;動態成像試驗模擬相對位移在曝光時間2ms內0.2~1.4個像元,整機傳函大于0.18,均能夠滿足設計要求。
5 結束語
該CCD遙感器通過地面的可靠性試驗和性能測試,所搭載的小衛星平臺于近期入軌進行成像試驗,將對凝視式CCD遙感器對空間相對運動目標成像進行探索,其在軌試驗的成功將為空間動態目標成像遙感器的研制提供有利的參考,其集約化的研制技術也將為輕小型載荷研制提供新的思路。
(
)
[1]岳濤.中國航天光學遙感技術成就與展望[J].航天返回與遙感,2008,29(3):10-19.
YUE Tao.The Achievements and Future Prospects of Chinese Space Optical Remote Sensing Technology[J].Spacecraft Recovery and Remote Sensing.2008,29(3):10-19.(in Chinese)
[2]王麗霞,王慧,高軍.星載超光譜成像技術應用及現狀分析[J].航天返回與遙感,2000,21(1):40-47.
WANG Lixia,WANG Hui,GAO Jun.Analysis of Application and Current Situation of Space-borne Hyper-Spectral Imaging Technology[J].Spacecraft Recovery and Remote Sensing.,2000,21(1):40-47.(in Chinese)
[3]Stephen L.The Space Maneuver Vehicle:Enhancing Space’s Utility to the War Fighter[R].ADA paper,2001,ADA4-04007.
[4]Chesters D,Jensm D.GATES-A Small,Agile Imaging Satellite for GOES-R[J].SPIE,1996,2812:30-39.
[5]Higbee Terry A,DARPASAT:Small,Smart Space System[J].Proc SPIE,1993,1:1940-1945.
[6]陳世平,楊秉新,王懷義,等.空間相機設計與試驗[M].中國宇航出版社.2003.
CHEN Shiping,YANG Bingxin,WANG Huaiyi,et al.Design and Experiment of Space Camera[M].China Astronautic Publishing House.2003.(in Chinese)
[7]王靈杰,張新,楊皓明,等.超緊湊型紅外折反式光學系統設計[J].應用光學 2007,28(3):288-291.
WANG Lingjie, ZHANG Xin, YANG Haoming, et al.Design of a Compact Infrared Catadioptric System[J].Journal of Applied Optics.2007,28(3):288-291.(in Chinese)
[8]李愛玲,張伯珩,邊川平.高速CCD圖像采集存儲系統的硬件設計[J].電子器件.2007,30(6):2145-2147.
LI Ailing,ZHANG Boheng,BIAN Chuanping.Design of High-Speed CCD Image Data Acquisition Hardware System[J].Chinese Journal of Electron Devices.2007,30(6):2145-2147.(in Chinese)
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52