高速綜合檢測時空同步技術
2012-07-13 08:53:48王登陽楊超
鐵路技術創(chuàng)新 2012年1期
■ 王登陽 楊超
高速綜合檢測列車軌道、牽引供電、通信、信號等基礎設施相互之間關聯(lián)性強,影響因素多。高速綜合檢測時空同步技術實現(xiàn)了一整套對檢測數(shù)據(jù)進行綜合分析、評價提供技術支撐的多系統(tǒng)時間里程同步采集發(fā)布系統(tǒng),為多專業(yè)檢測數(shù)據(jù)融合智能分析奠定基礎。通過系統(tǒng)的定位試驗,驗證了系統(tǒng)的定位精度,證明時空同步技術為高速綜合檢測列車運行過程中的時空同步提供了一個較為有效的解決方案。
1 時空同步技術概況
高速鐵路現(xiàn)階段主要采用高速綜合檢測列車進行鐵路基礎設施的綜合檢測。高速綜合檢測列車上有多個專業(yè)的檢測系統(tǒng),分別對軌道幾何狀態(tài)、加速度、輪軌力、接觸網(wǎng)、通信、信號等進行動態(tài)檢測。高速鐵路基礎設施系統(tǒng)復雜,為了保障行車安全、提高運輸效率、降低運營成本,需要通過綜合數(shù)據(jù)分析,對高速綜合檢測列車檢測數(shù)據(jù)及基礎設施狀態(tài)變化規(guī)律做出評價,為高速鐵路運營安全評估和指導養(yǎng)護維修提供技術支撐。
參與動態(tài)檢測的所有專業(yè)擁有統(tǒng)一、精確的時間里程信息,是進行線路基礎設施檢測數(shù)據(jù)綜合分析的前提和基礎。高速綜合檢測時空同步技術即是在綜合檢測列車上解決里程精確定位問題,為各個專業(yè)提供統(tǒng)一實時里程、時間同步等基礎信息的關鍵技術之一。時空同步技術包括里程定位和時間同步2個技術要點,國內(nèi)外高速綜合檢測列車采用的定位技術主要有以下幾種:
1.1 里程累加技術
(1)基于速度編碼器的里程累加定位技術。里程累加計距所需的脈沖信號通過安裝在列車輪對軸頭的光電編碼器提供。列車行駛過程中,光電編碼器和車輪以相同角速率轉動,列車行駛距離可通過采集、累計脈沖信號獲得。但是,利用速度編碼器對行車距離進行累加的誤差隨時間逐漸增大,并由于存在長短鏈、車輪空轉、滑行、磨損等多種情況,單純的速度編碼器累加不能對線路里程進行精確定位,必須輔以其他里程修正技術。
(2)基于多普勒雷達測速的定位技術。利用多普勒雷達獲得列車行駛速度,利用陀螺儀獲得列車在三維空間中各個方向的加速度,通過積分合成計算列車行駛距離。基于多普勒雷達測速的定位技術與速度編碼器定位技術一樣,存在累加誤差,必須輔以其他里程修正技術。
1.2 里程定位技術
(1)基于應答器的定位技術。基于應答器的定位技術是目前廣泛采用的列車定位方法。應答器按照規(guī)定距離安裝于軌道中心線上,列車通過應答器上方時,車載應答器接收天線獲取到應答器信息(包含位置信息),完成對列車的定位。基于應答器的定位技術優(yōu)點是定位精度高、使用壽命長、維護成本較低、在惡劣環(huán)境下可保證良好的穩(wěn)定性;缺點是只能獲得應答器所在位置的定位信息,必須輔以速度編碼器或多普勒雷達測速定位技術才能完整定位線路里程。新線聯(lián)調(diào)聯(lián)試過程中,應答器設備未調(diào)試完成,不能作為檢測列車的定位信息源使用。
(2)基于GPS的定位技術。GPS定位技術是通過衛(wèi)星對地面目標進行測定并進行定位和導航的技術。GPS定位技術具有使用方便、技術成熟、成本相對較低、維護容易等優(yōu)點。因此,GPS定位技術也是現(xiàn)階段檢測列車廣泛采用的定位技術之一。但GPS在山區(qū)、隧道、車站等遮擋區(qū)段會完全失效,且定位精度受衛(wèi)星星況、天氣氣候等因素影響較大。
(3)基于RFID的定位技術。RFID無線射頻技術作為一種新興的定位手段,已較廣泛應用于各種領域,尤其在物流管理領域應用非常廣泛。RFID技術在我國鐵路貨車追蹤、貨車車號自動識別等方面也早已得到應用,并趨于成熟。基于RFID的定位技術原理與應答器定位技術相似,但RFID標簽具有尺寸小、安裝方便等特點。因此,更適合在高速綜合檢測列車上進行精確定位。
除以上所述方法外,無線測距、慣性導航等其他定位技術在列車的定位系統(tǒng)中也得到應用。
1.3 時間同步技術
時間同步目前最通用的方法是利用GPS時鐘授時,先將網(wǎng)絡中一臺計算機的時鐘與GPS時鐘同步,再將這臺計算機作為時間服務器,網(wǎng)絡內(nèi)的其他設備基于網(wǎng)絡時間協(xié)議(Network Time Protocol)或精密時鐘同步協(xié)議(Precision Timing Protocol)與其進行時間同步。時間服務器輸出必須通過網(wǎng)絡接口,數(shù)據(jù)輸出格式必須符合時間同步協(xié)議,局域網(wǎng)內(nèi)所有PC、服務器和其他設備通過網(wǎng)絡與時間服務器保持同步,時間同步協(xié)議自動判斷網(wǎng)絡延時,對得到的數(shù)據(jù)進行時間補償,從而使局域網(wǎng)設備時間保持統(tǒng)一精準。時間同步原理見圖1。

圖1 時間同步原理
2 綜合檢測時空同步技術
2.1 里程同步實現(xiàn)原理
目前,高速綜合檢測列車采用RFID定位技術、GPS定位技術做為里程定位手段,里程累加使用速度編碼器定位技術,三者補充融合是解決里程定位問題的最佳手段。GPS與RFID定位優(yōu)缺點對比見表1。
由于GPS與RFID定位技術各具優(yōu)勢,時空校準系統(tǒng)中兩者相互補充、相互備份,速度編碼器信號用于定位點間里程的累加計距和誤差修正。
線路上每1~5 km設置一個定位點,采集GPS經(jīng)緯度,并在定位點同一截面線路兩側接觸網(wǎng)支柱上安裝電子標簽(見圖2)。在每2個相鄰定位點間系統(tǒng)利用高分辨率光電編碼器進行累加計距,維持里程定位數(shù)據(jù)連續(xù)性,編碼器信號累加誤差隨行車距離增加不斷增大,系統(tǒng)在每個定位點處的里程校準值用來修正編碼器累加誤差。
2.2 時空校準系統(tǒng)
綜合檢測時空校準系統(tǒng)以時間可控為基本設計理念,采用精確時鐘同步技術做為誤差修正手段,融合高速射頻、差分GSP、慣性導航及實時通信等定位手段,實現(xiàn)檢測列車高速檢測過程中的里程精確定位、信息發(fā)布、狀態(tài)監(jiān)控等功能。系統(tǒng)主要分為時間同步和里程同步兩部分,主體結構設計見圖3。

表1 GPS與RFID定位數(shù)據(jù)源優(yōu)缺點對比

圖2 定位點標簽安裝方式
(1)時間同步。系統(tǒng)采用GPS作為全車時鐘同步的基礎時鐘源。車載檢測系統(tǒng)由于涉及多個系統(tǒng),為避免GPS時鐘在通過隧道、橋梁、車站等GPS信號遮擋區(qū)段信息丟失,高速綜合檢測列車的時空校準系統(tǒng)配備高精度時間服務器提供連續(xù)、精確、守時的時間信息。
(2)里程同步。系統(tǒng)采用速度編碼器、DGPS定位系統(tǒng)和高速射頻電子標簽技術結合的方式進行地理數(shù)據(jù)信息采集和定位。
為了減少里程同步數(shù)據(jù)的通信時延,系統(tǒng)使用專用實時網(wǎng)絡進行數(shù)據(jù)的可靠傳輸,保證了同步數(shù)據(jù)網(wǎng)絡延時在微秒以內(nèi)。車內(nèi)各檢測系統(tǒng)PC、服務器等按照 “綜合檢測列車里程同步協(xié)議”與時空校準系統(tǒng)進行里程同步,達到全車檢測系統(tǒng)里程的實時統(tǒng)一。
列車運行過程中,里程同步服務器采集實時GPS經(jīng)緯度和射頻標簽信息,在“GPS–里程”和“RFID–里程”信息數(shù)據(jù)庫中進行信息對比,當?shù)竭_某個定位點時,系統(tǒng)軟件自動匹配出經(jīng)緯度和射頻標簽對應的線路里程,同時完成里程誤差修正,獲得當前列車瞬時里程值。里程同步服務器通過采集速度編碼器脈沖信號,在這個里程值上進行累加計算,以維護里程值的準確性,直到下一個定位點對里程值進行再次修正。時空校準系統(tǒng)就是通過這樣一個修正→累加→再修正→再累加的循環(huán),始終維護列車里程定位的準確性。時空校準系統(tǒng)里程同步原理見圖4。
時空校準系統(tǒng)軟件界面見圖5,安裝在里程同步服務器上,主要功能包括整車時間同步、整車里程同步及行車信息記錄。此外,服務器還具有監(jiān)控各個系統(tǒng)客戶端連接情況和正確接收報文情況等輔助功能。
2.3 系統(tǒng)車內(nèi)布置
時空校準系統(tǒng)服務器及接口單元在機柜內(nèi)的布置見圖6,包括里程同步服務器、時空校準接口單元和時間服務器。
射頻閱讀器通過萬向調(diào)節(jié)裝置安裝在兩側車窗,與車窗玻璃貼合,2個標簽閱讀器安裝位置與車頂?shù)亩ㄎ籊PS天線處于車體同一斷面上。射頻標簽閱讀器在車內(nèi)安裝實物見圖7。定位GPS天線采用高增益雙頻航空專用GPS天線,天線安裝在車頂位置(見圖8)。
3 定位精度驗證
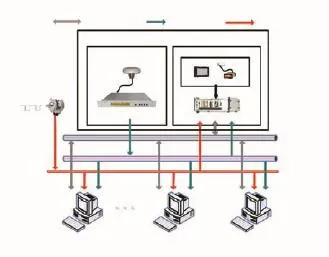
圖3 時空校準系統(tǒng)整體結構設計

圖4 里程同步原理
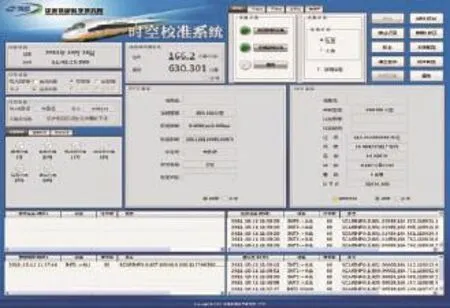
圖5 時空校準系統(tǒng)軟件界面

圖6 時空校準系統(tǒng)機柜布置圖
2011年3月4日—5月3日,系統(tǒng)在京滬高速鐵路先導段(徐州東—蚌埠南)進行了最高速度350 km/h定位精度驗證試驗,試驗在380A-001高速綜合檢測列車上完成。試驗過程中,檢測車車內(nèi)軌道檢測、動力學檢測、接觸網(wǎng)檢測、信號檢測等系統(tǒng)采用里程精確定位系統(tǒng)進行里程同步。
為了驗證高速狀態(tài)下的系統(tǒng)定位精度,試驗采用了激光觸發(fā)裝置。試驗在上行線K756+209及K756+004 2處接觸網(wǎng)桿上安裝射頻標簽,作為精度驗證A、B 2個試驗點,安裝高度為軌面以上2.2 m;在2處試驗點間,上行線K756+102處接觸網(wǎng)桿上安裝激光發(fā)生器試驗裝置,安裝高度為軌面以上2.35 m。車內(nèi)激光接收位置與標簽閱讀器在同一列車定位截面。經(jīng)現(xiàn)場實際測量得到:激光發(fā)生器與A、B 2個試驗點的精確間距分別為109.1 m和95.7 m,測量誤差≤0.1 m。
當列車高速經(jīng)過A、B 2個試驗點及中間激光器基準點時,標簽閱讀器和激光發(fā)生器信號采集見圖9。列車經(jīng)過A或B兩點時系統(tǒng)自動定位出試驗點里程,并在此里程基礎上根據(jù)光電編碼器信號進行里程累加。激光觸發(fā)裝置在接收到激光光束的瞬間發(fā)出觸發(fā)脈沖,驅動計數(shù)器停止里程累加,從而得到列車從射頻標簽到激光發(fā)生器處的定位距離。整個激光觸發(fā)過程由硬件板卡完成,延時誤差忽略不計。
列車以不同速度(50、150、200、250、300、350 km/h)通過試驗點和激光器,系統(tǒng)定位的行車間距與實際值對比,從而驗證系統(tǒng)的定位精度。試驗數(shù)據(jù)結果見圖10。
圖10是各速度級下時空校準系統(tǒng)定位的A、B 2個定位點到基準點的“距離-速度”曲線。曲線描述了列車以不同速度級正反向通過K756—K757試驗區(qū)段數(shù)次。從圖中可以看出,列車正反向通過A、B 2個定位點和基準點數(shù)次,每次獲得的定位點到基準點距離曲線與實測距離基本吻合,定位最大誤差<0.3 m。
4 結論
綜合檢測時空同步技術首次實現(xiàn)了400 km/h條件下的精確定位,定位精度達到1 m,極大提升了國內(nèi)檢測列車裝備的技術水平。

圖7 車內(nèi)射頻閱讀安裝完成圖

圖8 車頂GPS天線安裝完成圖
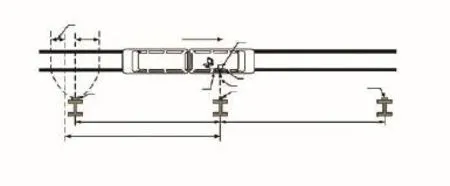
圖9 射頻標簽試驗驗證示意圖
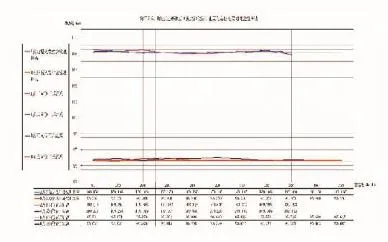
圖10 系統(tǒng)定位修正后兩點距激光器與實際距離對比驗證曲線
目前,時空校準系統(tǒng)已經(jīng)在CRH380A-0150C、CRH380A-001、CRH380B-002、0號、CRH2-061C等多輛高速綜合檢測列車上使用。在京滬高速鐵路聯(lián)調(diào)聯(lián)試及日常檢測中取得了較好的應用效果。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
