基于遺傳算法的反衛星攔截軌道優化
2012-07-09 02:31:16楊亮,武健,馬肸
兵器裝備工程學報 2012年8期
關鍵詞:優化
楊 亮,武 健,馬 肸
(第二炮兵工程大學 603 室,西安 710025)
隨著空間技術的發展,空間對抗日益增強,作戰領域空間化的發展趨勢不斷明朗,外層空間必然成為今后的主戰場。利用空間停泊武器有效殺傷敵方外層航天器無疑是削弱敵方空間力量強有力的手段。
對于空間攔截,以沖量攔截方法應用最為廣泛,國內不少學者也對最優沖量攔截進行了深入研究。眾多學者針對直接發射攔截、路徑約束攔截、時間固定及有時間約束攔截等實際問題,利用不同的動力學方程進行研究,給出沖量解得性質和一些其他的結論[3-5]。同時優化理論在軌道攔截計算中得到廣泛使用,如非線性規劃法、遺傳算法、蟻群算法、退火算法等[6-7]。針對單脈沖軌道機動樣式,在固定時間最優能量機動的基礎上建立了基于遺傳算法的反衛星攔截器在軌機動攔截的優化模型。
1 坐標系和研究假設
本文只考慮橢圓軌道情況。定義赤道慣性坐標系OXYZ:坐標原點在地球中心;X 軸沿地球赤道面和黃道面的交線,指向春分點γ;Z 軸指向北極;Y 軸在赤道面上垂直于X軸。
在此做如下的假設:
1)地球為半徑Re=63 711 110 km 的圓球,地球引力場為距離平方反比力場,地球引力常數μ =3.986 004 418 ×1014m3/s2。
2)對反衛星攔截器施加的推力以沖量形式作用,所以在變軌機動點時所獲得的速度增益為瞬時速度增益。
3)不考慮空間中攔截器受曬、測控支持、引力和大氣阻力等的攝動問題,并略去地球旋轉對攔截器飛行運動的影響。
2 實時位置及速度建模
現已知攔截器及目標衛星軌道的6 個根數,即(a,e,i,Ω,ω,tP),則描述其位置和速度步驟如下:
在慣性空間,攔截器及目標衛星某時刻位置矢量r 可以表達如下
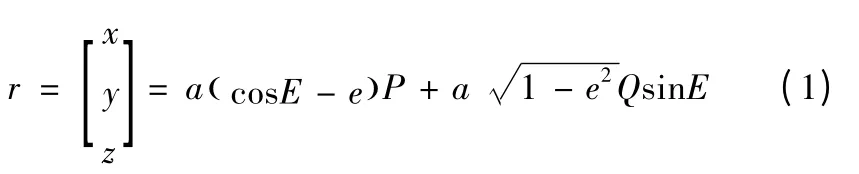
對式(1)進行微分
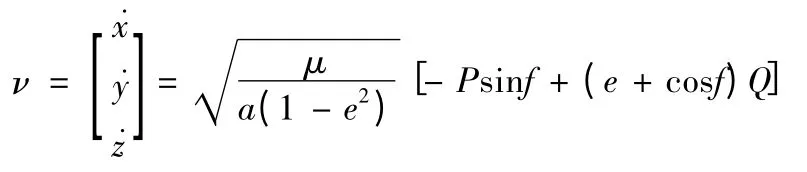
其中
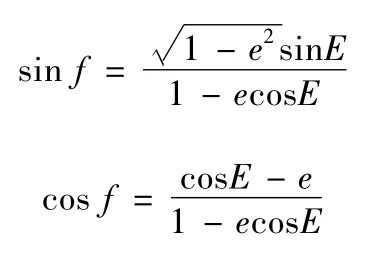
利用坐標轉換,單位矢量P,Q 在赤道慣性坐標系中表達如下:
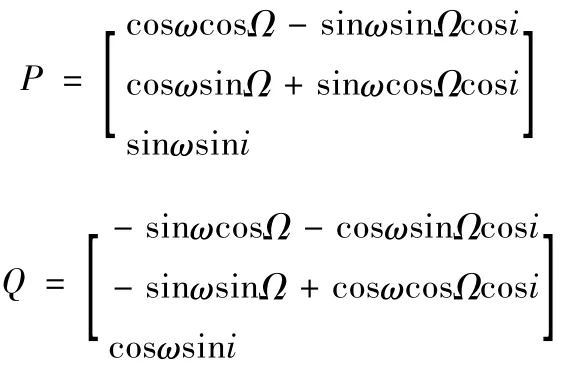
在軌道根數已知下,先解開普勒方程,再代入式(1)即可得到攔截器及目標衛星的實時位置,用迭代法解開普勒方程的過程如圖1 所示。
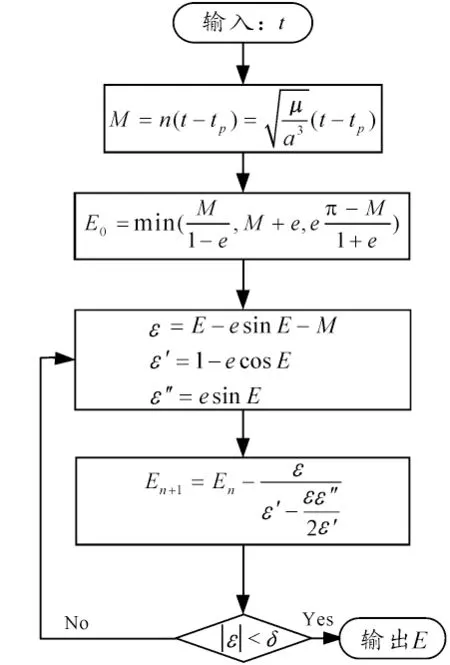
圖1 迭代流程
3 軌道機動攔截模型
如圖2 所示,反衛星攔截器運行初始軌道為軌道Ι,t 時刻攔截器的位置矢量和速度矢量分別為r1和v1,假定在該時刻對其施加速度沖量Δv,使攔截器的速度矢量變為ν2,并進入另一條軌道F,經Δt 秒后命中預定的空間位置矢量為vm的目標衛星。
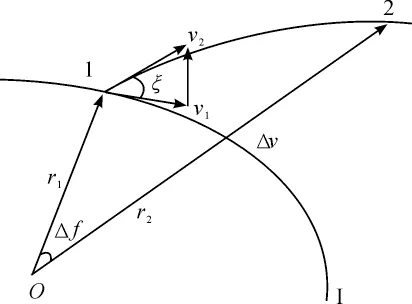
圖2 軌道攔截示意圖
記軌道F 的半通徑為P2,偏心率為e2,則r1和r2的夾角為Δf(即真近點角之差),計算如式(2)所示。

設定

(E1,E2為解開普勒方程所得的偏近點角)
則有e2,p2關系式為
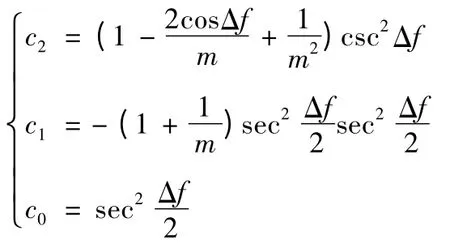
c2,c1,c0分別為
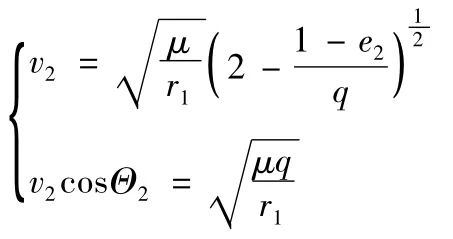
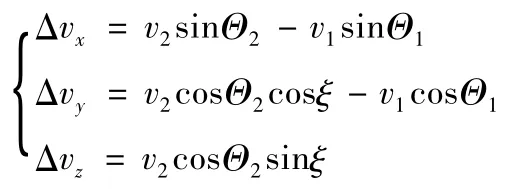
根據活力公式及動量守恒定理即可計算v2(Θ2為終極軌道的速度傾角)
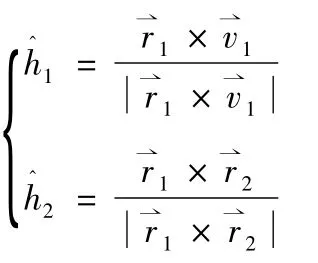
則初、終軌道的夾角
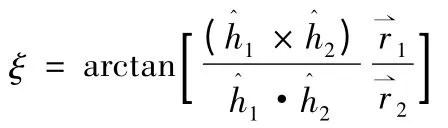
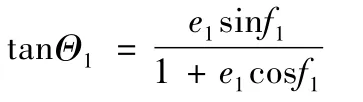
則最終可以得到軌道坐標系下的Δv
4 遺傳算法思想及設計
遺傳算法是一種隨機的全局搜索方法,模仿自然生物進化的一些方面。其不要求優化函數具備連續、導數存在等假設,又不需要先驗經驗,能很快地收斂到最優解附近,因此用來解決軌道攔截優化的問題具有一定的優越性。采用遺傳算法求解的主要內容包括問題解的基因表示,個體的適應度函數,以及對種群的遺傳操作。
1)問題解的基因表示
將反衛星軌道機動攔截優化設計轉化為對時間點的優化搜索,遺傳基因表示為攔截器機動開始時刻t1和攔截時刻t2,采用十進制編碼方式進行編碼。為保證兩個基因具有足夠的選擇,編碼時每個基因所需要的十進制數的位數為8位,如圖3 所示。

圖3 基因編碼圖
2)適應度函數
基于單脈沖機動攔截,本文對能量進行優化,即需要能量最小,故遺傳算法的適應度函數可表示為:Fitness=Δv。
3)遺傳操作
選擇算子。采用比例選擇算子,選擇適應度值較小的個體作為下一代的群體的父代。在優化問題當中,最優解可能在解空間的邊界或在非可行解的附近,如果全部舍去非可行解則可能減少獲得最優解的概率,因此在算法中以較小的概率選擇非可行解,與可行解一起進行交叉、變異操作。交叉算子。采用單點交叉方式,隨機挑選種群中兩個個體作為交叉對象,并隨機產生一個交叉點位置。變異算子。隨機選擇群體中的個體并隨機產生變異點位置。
4)遺傳算法參數的選擇
遺傳算法的參數包括種群數目、遺傳的代數、交叉和變異的概率。參數的選擇是一個開放的問題,目前還沒有一個統一的選取規則,尤其是各個參數之間的相互影響更是難以精確的表達.這里選擇根據經驗和多次實驗,設定如下的參數:種群數目為50,遺傳代數為100,交叉概率為0.8,變異概率為0.1。
5 仿真算例
在此假定已經通過地面測量設備得到反衛星攔截器及目標衛星軌道的6 個根數,如表1 所示。
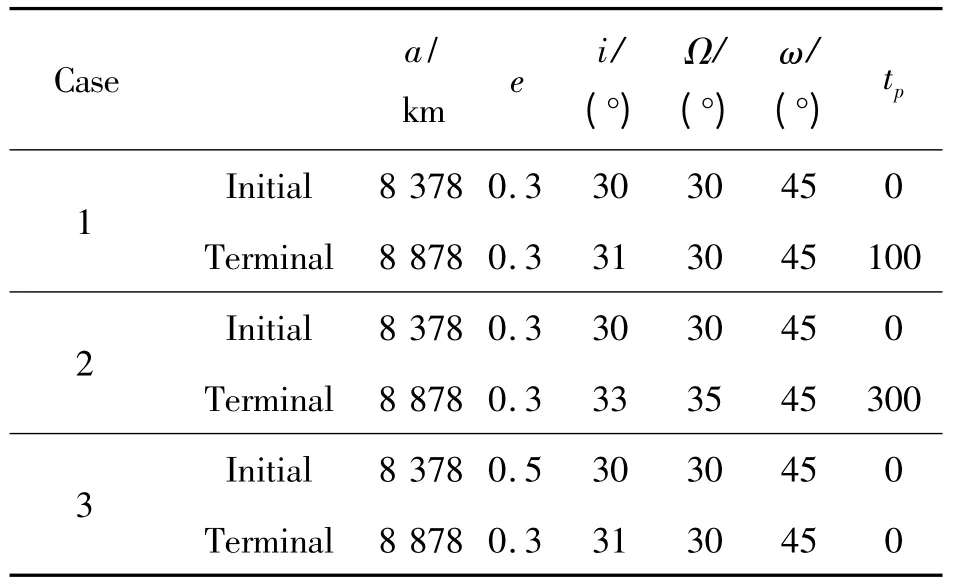
表1 最優能量問題仿真條件表
經仿真計算得到最優能量迭代變化如圖4 所示。
從結果看出,應用遺傳算法搜索,迭代不需要太多次數,即能夠得到一個滿足約束條件可行的最優解。
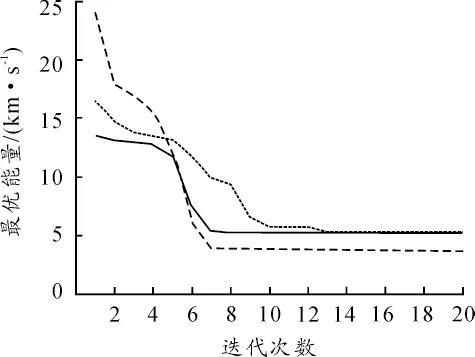
圖4 迭代圖
將優化設計結果值代入衛星工具包(STK)進行檢驗,得到的末端位置誤差如表2 中Δr/m 一欄所示,結果表明了迭代算法的正確性。
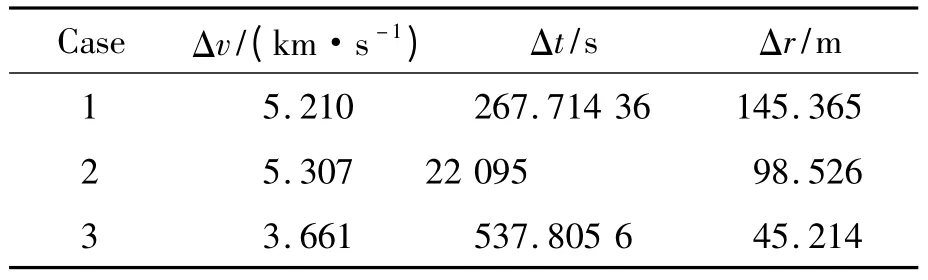
表2 速度增量、飛行時間及末端誤差
從結果看出,應用遺傳算法搜索,迭代不需要太多次數,即能夠得到一個滿足約束條件可行的最優解。
6 結束語
本文從空間作戰的角度出發,為優化在軌攔截器對某一目標衛星的攔截軌道,提出了基于遺傳算法優化反衛星攔截器機動攔截的模型,并以算例進行全軌道最小能量優化仿真計算。結果表明,應用遺傳算法可行有效且搜索速度較快,所得優化結果滿足各約束條件。
[1]任萱.人造地球衛星軌道力學[M].長沙:國防科技大學出版社,1988.
[2]云慶夏.進化算法[M].北京:冶金工業出版社,2000.
[3]白洪波,馬書興,朱麗萍,等.空間作戰中固定時間軌道攔截的仿真研究[J].航天控制,2006,24(4):62-65.
[4]徐曉靜,張恒源,李智.空間作戰中的軌道攔截建模與仿真[J].裝備指揮技術學院學報,2005,16(5):60-63.
[5]馬丹山,王明海,鮮勇,等.逆軌道攔截衛星軌道設計與優化[J].飛行力學,2009(10).
[6]王石,祝開建,戴金海.用進化算法求解軌道轉移的時間——能量優化問題[J]. 宇航學報,2002,23(1):73-75.
[7]齊映紅,曹喜濱.基于遺傳算法的最優多脈沖交會軌道設計[J].哈爾濱工業大學學報,2008(9).
[8]YOUNG H K,DAVID B S.Optimal Spacecraft Rendezvous Using Genetic Algorithms[J].Journal of Space—craft and Rockets,2002,39(6):859-865.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
