基于DELMIA/Robotics的白車身焊接機器人仿真應用
2012-07-04 09:42:32秦基偉章敏鳳
制造業自動化 2012年11期
秦基偉,章敏鳳,楊 寧
(奇瑞汽車股份有限公司,蕪湖 241006)
0 引言
多年以來,白車身焊裝領域,國內的絕大多數主機廠還停留在一個較低的技術水平上。焊裝、總裝工藝工程師最為主要的工作內容就是Excel填表和截圖,文本性的工作占據了大量時間,工藝工程師很難有時間去考慮制造工藝本身的問題,如節拍、生產線布局合理性以及工位仿真等。DELMIA就是應運而生的全3D數字化制造解決方案。它能使在真實工廠或者生產過程還沒有開始前,在虛擬空間中對真實工廠進行數字化仿真,并提供優化的結果。為前期項目方案制定,項目競標,以及方案實施提供有利幫助,同時為后期示教、維護提供直觀的指導。本文以奇瑞-哈工大聯合開發的大負載六自由度QH-165型機器人,為應用對像,仿真S11白車身側圍的點焊過程,通過DELMIA軟件中的Robotics模塊對其進行焊接路徑的仿真。結果表明,利用DELMIA/Robotics實現機器人仿真是方便、準確和有效的。統兩大部分組成。實際焊接應用時需增加焊接控制器、焊槍以及水、氣控制檢測等外部設備。機器人技術參數見表1。

圖1 QH-165機器人模型
1 機器人結構及技術指標
QH-165型機器人為六軸串聯機器人,其本體結構如圖1所示,整個系統由機械本體和電控系

表1 機器人技術指標
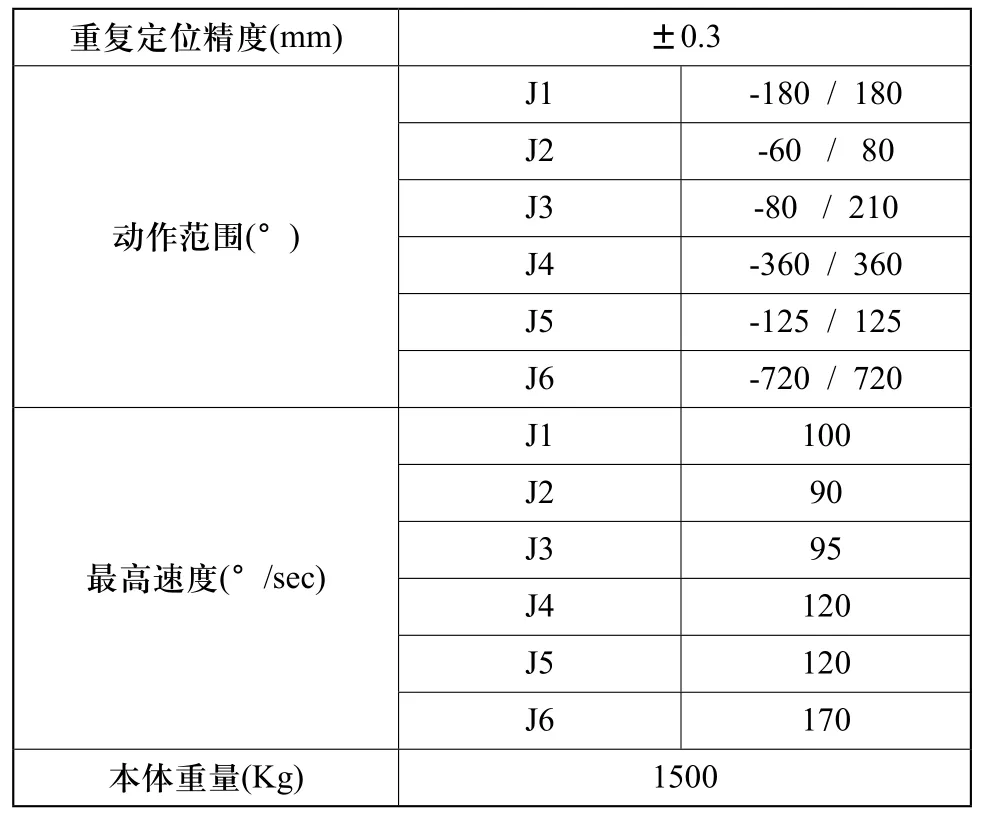
續表
2 DELMIA簡介
DELMIA是Dassault Systemes公 司 為“數字化工廠”概念推出的一套較完善的軟件解決方案。DELMIA軟件系統包括兩個相互關聯的獨立軟件,DPE
(Digital Process Engineer)與 DPM(Digital Process Manufacturing),前者為數字化工藝規劃平臺,它建立產品數據、資源數據和工藝結構,并將三者有效地關聯在一起,實現產品分析、工藝方案評估、各種數據統計計算以及裝配工藝結果的輸出等;后者提供工藝細節規劃和驗證應用的環境,以產品、
工裝的三維模型并結合DPE已設計好的工藝流程進行數字化裝配過程的仿真驗證,二者通過唯一的PPR Hub數據庫共享數據。
由于該側圍焊接為自動化改造項目,根據工藝要求,本文重點介紹如何使用DELMIA的DPM模塊來做工藝細節規劃和驗證工作。
3 工藝分析
車間可提供的左右側圍布局尺寸均為:15.5m×6m。根據側圍件尺寸和工藝點的數量,設計工裝夾具后可放置四個工位。內、外板總成焊接由人工完成,其中外板分裝件由人工搬運到第一個工位并焊接完成,內板總成在其他人工工位焊接完成后需由機器人搬運至第二個工位。整個側圍總成在機器人焊接完成后,也需由機器人搬運送至EMS小車上。主線采用PLC控制,Profibus總線通信,節拍120s。根據以上分析,最終確定設計四個工位,八臺機器人,由于左右側圍對稱設置,因此下文只以右側圍為例,布局如圖2所示。
其中OP10為外板總成人工工位。OP20為內板總成搬運及內、外板關鍵工藝點自動焊接工位,A1機器人完成內板總成從B滑臺搬運到OP20工位上,隨后A2、A3、A4機器人完成內、外板關鍵點的焊接。OP30工位的三臺機器人完成內、外板工藝點的補焊工作。OP40工位的一臺機器人實現焊接完成后的側圍總成搬運到EMS小車上的功能。至此整個右側圍總成焊接工作完成。
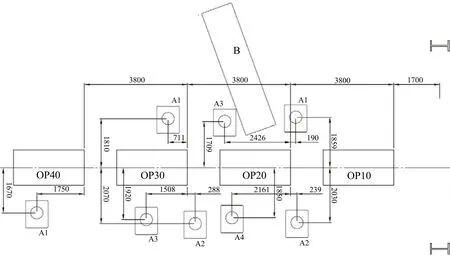
圖2 右側圍布局
4 細節仿真
4.1 焊鉗選型
根據每臺機器人分配的焊點,利用DPM中的TSA工具制作出供廠家制作焊鉗用的數模文件,當廠家的焊鉗設計完成后,亦可用此方法驗證該焊鉗與工件和工裝之間是否有干涉,最終完成焊鉗選型。
4.2 機器人位置布局
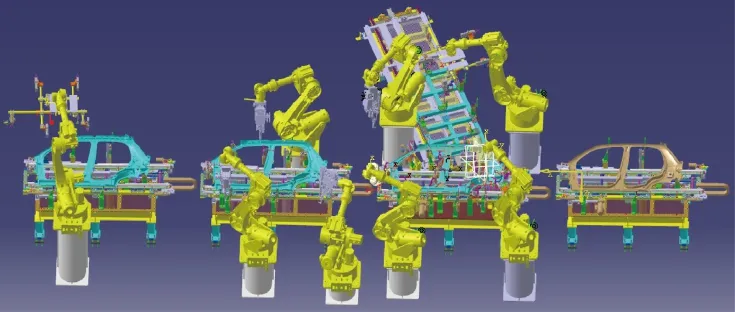
圖3 完整工位布局
機器人放置位置不僅影響機器人的可達性,更關系到機器人及末端工具與工裝、工件,機器人與機器人之間的干涉問題,合理的位置可以有效減少甚至避免干涉問題。DELMIA中Auto Place工具可以方便的找出機器人的擺放位置和高度。最終機器人布局如圖3所示。完成以上工作后將制作有運動機構的焊鉗用Set Tool工具裝配到機器人末端即可進行機器人示教仿真工作。
4.3 機器人示教
機器人的示教和軌跡優化是DELMIA的又一個亮點,它能夠真實的模擬機器人的運動姿態。利用Teach a device命令,選擇要示教的機器人,即可調出機器人示教窗口,如圖4所示,在此窗口中可以方便的插入/刪除軌跡點、修改位姿、增加焊接動作、IO設置以及調整焊接工序等等。通常機器人示教完成后,其運動軌跡與實際是相差比較大,經常出現某個軸旋轉360度的現象,因此我們需要對其軌跡進行優化,使其與現實相符。自動軌跡優化命令:Set TurnNumbers,如圖5所示,在該窗口中可以選擇最小旋轉角度(ShortestAngle)模式進行優化,優化完成后即可按照優化后的軌跡運行。

圖4 機器人示教窗口
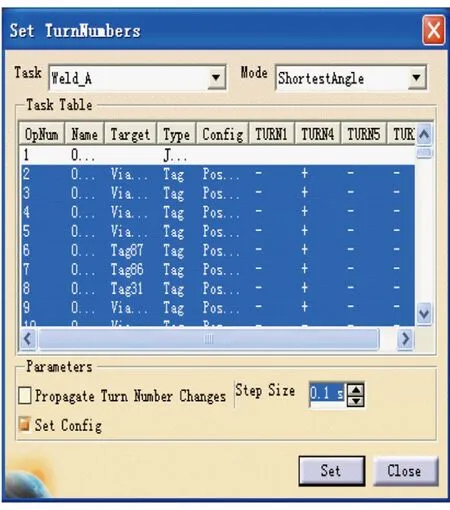
圖5 機器人軌跡優化
4.4 干涉區
干涉區簡單的說就是運動設備之間可能發生碰撞的一個空間區域。避免設備之間發生碰撞的方法通常是在干涉區域內同時只允許一臺設備作業,這種避免方法也有二種,一是時間干涉,二是空間干涉。時間干涉法由于浪費大量時間而很少使用,特別是在龐大系統中;空間干涉是將有可能出現干涉的區域劃分出來,該空間內同時也只有一臺設備可以申請作業,進入干涉區域后該設備主動發出區域鎖定信號限制其他設備進入,當設備離開干涉區域后發出釋放信號。由于空間干涉法控制方便而被廣泛采用。DELMIA中提供的空間干涉法Clash可以在設備安裝調試之前就可以準確的找到所有干涉區域,能夠大大縮短調試時間。
5 結論
通過理論設計與實現應用我們發現在計算機中應用DELMIA仿真的所有數據可以準確的反應現實狀況,更為調試提供了積極的指導作用,實際焊接的樣件通過三坐標檢測和破檢驗證全部合格,焊點一致性和質量遠高于人工生產的產品。
[1] 戶燕會.工業機器人的工作空間和誤差補償的分析與仿真[D].河南: 河南理工大學, 2010.
[2] 達索.工業機器人仿真培訓資料[Z].法國達索公司, 2009 .
[3] 崔茂源 .基于虛擬現實技術與監控理論的機器人示教系統研究[D] .長春:吉林大學 ,2004 .
[4] 劉榮 譯 .機器人探索[M] .電子工業出版社 .2003 .
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
山東冶金(2019年6期)2020-01-06 07:45:54
世界農藥(2019年2期)2019-07-13 05:55:12
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
銅業工程(2015年4期)2015-12-29 02:48:39
