魚雷武器控制系統半實物仿真系統設計與實現
2012-07-02 00:51:10孔德永
兵器裝備工程學報 2012年6期
關鍵詞:系統
孔德永
(湖北經濟學院 電子工程系,武漢 430205)
仿真技術(包括數學仿真和半實物仿真)在武器系統領域的應用已經十分廣泛和成熟。對于魚雷武器的控制系統來說,數學仿真可以從理論上驗證控制系統在各種干擾條件下的穩定性、準確性和魯棒性,揭示各種干擾因素對控制系統的影響;而半實物仿真則將真實設備作為參試單元,充分模擬和考核控制系統在真實狀態下的工作性能、工作流程以及可靠性,二者相輔相成,共同完成控制系統的地面試驗。通過充分、充足的地面試驗,可為控制系統的成功研制打下堅實的基礎[1]。
魚雷控制系統主要具有3 個基本方面的功能:①控制魚雷穩定航行,即按程序彈道完成魚雷的穩定控制;②與自導裝置組成制導回路,完成魚雷對目標的搜索及跟蹤;③對于線導魚雷來說,還可與線導系統組成線導導引大回路,由艇上發控臺完成對魚雷的線導導引。其作戰流程如圖1 所示,主要功能概述如下[2-3]。
1)射前準備。系統上電后,自動開始自檢、接收艇型管號信息,向發射艇回復、接收艇上的導航參數并完成雷上慣導系統的初始對準。若對準工作正常,在上電后xx 時間內,向發射艇回復“慣導調平正常”信息;
2)接收、存儲由發射艇通過預設定電纜發送的預設定信息,并回送給發射艇,完成預設定功能;
3)完成雷內各子系統的自檢,并將自檢結果回送給發射艇;
4)在魚雷發射前協調并控制雷內各子系統的動作;
5)魚雷發射后控制魚雷安全脫離發射平臺、進行初始機動以保證雷艇安全分離;
6)魚雷航行過程中保證魚雷在3 個通道上穩定獨立地工作,縱仰通道具有定深控制及俯仰角控制功能,偏航通道具有偏航角控制及偏航角速率控制功能,滾動通道具有自穩定功能;
7)對于線導魚雷來說,具有按線導遙控指令改變魚雷航向角及改變航行深度的能力;
8)自導系統開機前,允許發射艇通過遙控指令進行自導反潛反艦通道的切換;
9)在自導搜索和線導導引段,控制魚雷運動的滾動角及航行深度,保證魚雷彈道快速平穩以及安全航行;
10)自導導引過程中,接收自導系統給出的目標信息,按照反潛算法或反艦算法控制自導系統的工作狀態,操縱魚雷運動完成對目標的跟蹤彈道;
11)控制觸發引信及非觸發引信的工作狀況及保險解除;
12)控制發動機的點火時刻及速制改變;
13)解算魚雷運動過程中的雷位信息及運動參數,分別送給線導系統及內測系統;
14)具有安全保護算法,保證在初始機動及自導導引過程中發射艇的安全;
15)對操雷來說,具有反潛靶前規避、過靶停車及反艦規避功能。
1 仿真系統組成
根據魚雷制導控制系統的組成和功能,設計如圖2 所示的魚雷控制系統半實物仿真系統。系統主要包括發射平臺模塊、目標模塊、自導系統模塊和魚雷控制系統模塊,這4 個模塊分別與魚雷控制系統工作環境中的各實體相對應,并完成實體所具備的功能。此外,還設計了一個仿真服務器模塊,作為系統的人機交互接口,主要負責對系統其余各模塊進行管理和控制,并在系統進行仿真時協調各模塊之間的動作,從而完成系統所設計的功能。
1)仿真服務器模塊,主要按照預先制定的作戰想定完成半實物仿真系統的初始化,在仿真過程中作為白方,負責顯示整個仿真過程,并在仿真結束后對整個作戰過程進行作戰效能評估。
2)發射平臺模塊,接收仿真服務器設定的發射平臺初始運動信息,并根據目標與自身相對位置關系進行自身彈道解算,模擬發射平臺對目標的攻擊過程,在確定發射魚雷時模擬完成魚雷武器的射前準備過程(包括對魚雷上電、自檢、發送艇型管號信息、發送慣導調平參數、發送及檢查預設定參數信息),發射線導魚雷后模擬線導導引功能(和魚雷進行遙控遙測信息交換),在接收到魚雷爆炸信息后根據爆炸點距離自身位置、爆炸威力進行自身毀傷計算,并發布自身狀態信息(完好、部分毀傷、毀傷)。
3)目標模塊,接收仿真服務器設定的目標初始化信息后進行自身彈道解算,模擬目標的運動過程。仿真過程中考慮簡單的情況,即目標作勻速直線運動,不考慮目標的機動和規避。在接收到魚雷爆炸信息后根據爆炸點距離自身位置、爆炸威力進行自身毀傷計算,并發布自身狀態信息(完好、部分毀傷、毀傷)。
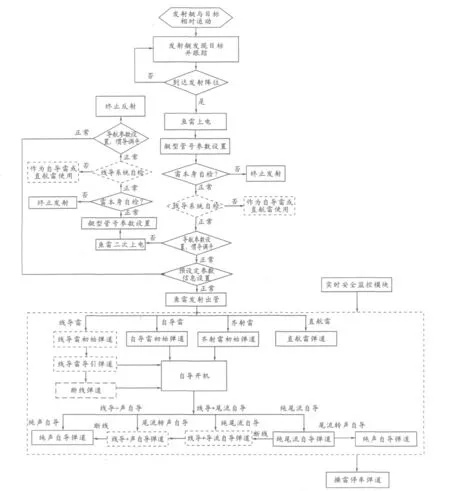
圖1 魚雷武器作戰流程
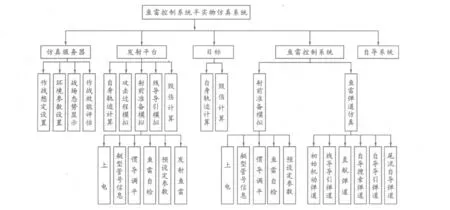
圖2 魚雷控制系統半實物仿真系統組成
4)魚雷控制系統模塊,主要負責對魚雷的作戰過程進行模擬,包括魚雷武器的射前準備過程模擬和魚雷發射出管后的彈道仿真。與發射平臺的射前準備相對應,控制系統的射前準備模擬也包括上電、自檢、艇型管號信息、慣導調平、預設定等過程,對于線導魚雷來說還包括線導自檢。出管后的彈道仿真包括:初始機動彈道、線導導引彈道(對于線導雷來說)、直航彈道、聲自導搜索彈道、聲自導跟蹤彈道、尾流自導導引彈道等的仿真。
5)自導系統模塊,負責在彈道仿真時對魚雷自導系統進行模擬,即模擬魚雷自導系統將探測到的目標數據信息傳遞給魚雷控制系統。
2 關鍵技術
2.1 時空一致性
在半實物仿真系統的實現過程中,時空一致性一直是其難點和重點。為了保證空間的一致性,要求目標、發射平臺、魚雷在對外進行數據交互,發布自身信息時位置參數一律統一到地理(導航)坐標系(東北天)中,在仿真服務器進行初始化設置時也采用地理坐標系,在仿真進行中,仿真成員在接收到其他仿真成員參數時首先將數據從地理坐標系轉換到自身所使用的坐標系再進行使用。另外系統的仿真時間(相對時間)由服務器統一控制,這樣就保證了系統在半實物仿真時的時空一致性[4]。
2.2 實時性保障
實時控制是半實物仿真系統的基本要求。從實際仿真的時間分析來看,目前計算機的處理能力對于數據運算完全可以達到實時性仿真的要求。對于魚雷控制系統的仿真來說,慣導組件、控制系統通訊對時間間隔要求比較嚴格,例如,慣導調平數據為2 幀/秒,線導通訊為0.5 幀/秒,因此定時和時間的精確控制是實現實時仿真的關鍵因素。與半實物仿真關系密切的時間是從仿真開始時刻到當前時刻的時間間隔,屬于相對時間(即邏輯時間)。
為了保證魚雷控制系統半實物仿真系統的實時性,采取了如下的措施。
1)魚雷運動模型的解算程序運行在VxWorks 環境下,采用單任務單進程“獨占”的工作模式,以減少由于系統調度和操作系統帶來的額外開銷,盡管Windows 系統在處理人機交互和管理功能方面顯示了較強的能力,但由此帶來的開銷也是比較大的,內核的運行需要數十兆到幾百兆的內存,而且將用戶限制在第3 層上,使得用戶對硬件的訪問必須經過用戶接口函數(application programming interface,API)進行,這就限制了他在實時仿真方面的應用。在很多工業控制上,實時操作系統MS-DOS 和VxWorks 得到了廣泛的應用。用于對發射平臺進行模擬的計算機由于涉及到很多的狀態監控,其操作系統為VxWorks。發射平臺模塊程序由于在射前準備和線導遙控遙測過程中,需要周期性地和魚雷控制系統進行數據交換,因此其實時性也必須得到保證。
2)發射平臺模塊程序和魚雷動力學模型的解算程序都是通過對8259 芯片編寫中斷程序[5],直接訪問PC 機專用的16 位時鐘計數器實現的,其時間計數周期達到0.838 μs。在定時發送數據的等待里,采用循環查詢的方式計算兩次仿真任務之間的時間。實踐表明:采用計時方式可以滿足實時仿真的要求,在數據發送和接收的過程中沒有出現錯幀和丟幀的現象,半實物仿真時間和數學仿真時間差別在1 ~2 個周期之內。在半實物仿真中一些系統延遲是不可避免的,例如控制系統從接收到數據到輸出到舵機,所采集到的舵信號之間有1 ~2 周期的延遲,這是系統硬件電氣連接所決定的。另外數學仿真過程中沒有把初始化過程以及讀取數據文件所花費的時間計算在內,考慮到這些因素,數學仿真和半實物仿真相差一定時間是可以接受的。
3)盡量減小數據傳輸延遲開銷,減小各種電氣信號連接線的長度以及一些額外開銷,由于訪問外設速度花費比訪問內存和緩存的時間多,故可減少程序訪問硬盤的次數,減少試驗保存的數據量,以二進制數據塊的形式讀取文件以及采用讀緩沖、寫緩沖等機制。
3 系統實現
為了實現圖2 中系統各部分的功能,在實驗室中構建了如圖3 所示的半實物仿真系統。系統以計算機局域網為硬件平臺,參加半實物仿真的設備包括三軸轉臺(含相應的上位機、下位機、控制柜、電源柜)、魚-X 魚雷控制段、舵機負載模擬器、程控壓力裝置等。
圖3 中,服務器計算機為1 臺工控機,完成目標模塊、發射平臺模塊和仿真服務器模塊的功能,他與魚-X 魚雷控制段有2 種通訊方式,實線標明的RS-232 接魚雷控制段的預設定電纜,主要用于發射平臺完成魚雷武器射前準備的各種通訊;虛線的RS-232 接魚雷的線導電子組件(對于線導魚雷來說),主要用于完成發射平臺與魚雷武器在魚雷出管后的遙控遙測數據傳輸,另外通過網絡接收仿真機傳來的魚雷運動參數,并將目標運動參數傳遞給仿真計算機。仿真計算機為一臺研華工控機,主要完成魚-X 魚雷6 自由度彈道解算,采用網絡通訊與服務器、轉臺控制下位機進行數據交換,同時接收目標運動參數加上干擾后作為自導的測量結果通過RS-485 傳遞給魚雷控制系統,并通過另一個RS-485 串口將航行深度數據輸出到程控壓力裝置,該裝置的壓力信息被控制段的壓力傳感器所敏感測量。仿真計算機通過研華公司的PCI -1712L 數據采集卡(外接PCLD -8712 通用端子板)采集舵機負載模擬器的舵偏角(A/D)。下面對構成系統的主要組成硬件進行詳細說明。
在實驗室條件下為了節約成本,在服務器計算機上實現了目標模塊、發射平臺模塊、仿真服務器模塊三大模塊的功能。為了保障實時性,對目標彈道解算、發射平臺解算、服務器(主要是態勢顯示)的計算量進行了試驗,運行了10 000幀的結果表明:目標彈道每幀的計算時間為0.023 ms,發射平臺的解算時間為0.035 ms,最耗時的是態勢顯示,其時間為2.49 ms。人眼所能辨識的顯示變化為不超過24 幀/秒,所以并不是每1 次的仿真計算都需要對態勢顯示進行更新。為了減少通訊量和態勢顯示的時間,仿真中規定:魚雷六自由度動力學仿真(仿真機上運行的)周期為1 ms,而態勢顯示等更新周期定為100 ms,輸出給轉臺控制的周期也為100 ms。
服務器與魚-X 魚雷控制段的連接有2 個通路:實線標明的RS-232 模擬預設定電纜連接,主要是模擬發射平臺與魚雷控制系統完成魚雷射前準備的工作;虛線標明的RS -232 模擬線導導引功能。另外他通過網絡與仿真計算機進行數據交換。
仿真計算機主要是完成魚雷出管后的彈道解算,通過PCI-1712 數據采集卡采集舵機負載模擬器的角度,根據魚雷的動力學仿真模型,解算出魚雷下一時刻的位置、速度、姿態角、航行深度等,然后通過網絡控制下位機使轉臺的3 個軸轉動到相應的角度,這些角度被安裝在轉臺上的控制段慣導組件敏感得到,作為控制系統的輸入。同時他將魚雷的航行深度通過RS-485 輸出到程控壓力裝置,程控壓力裝置的壓力信息被魚雷的深度傳感器(包括深水壓力傳感器、淺水壓力傳感器)所敏感作為控制系統的航深數據。
4 仿真結果
根據上述系統仿真試驗的過程,進行了某型魚雷彈道的半實物仿真試驗,其中魚雷的自導方式設置為線導+尾流自導方式,目標為水面目標。其仿真彈道曲線如圖4 ~圖6所示。
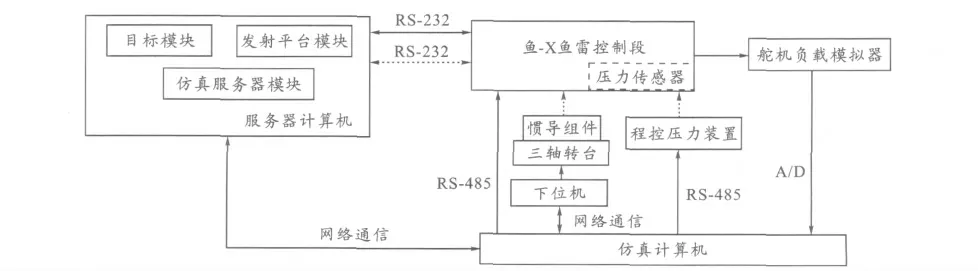
圖3 魚雷控制系統半實物仿真系統硬件結構
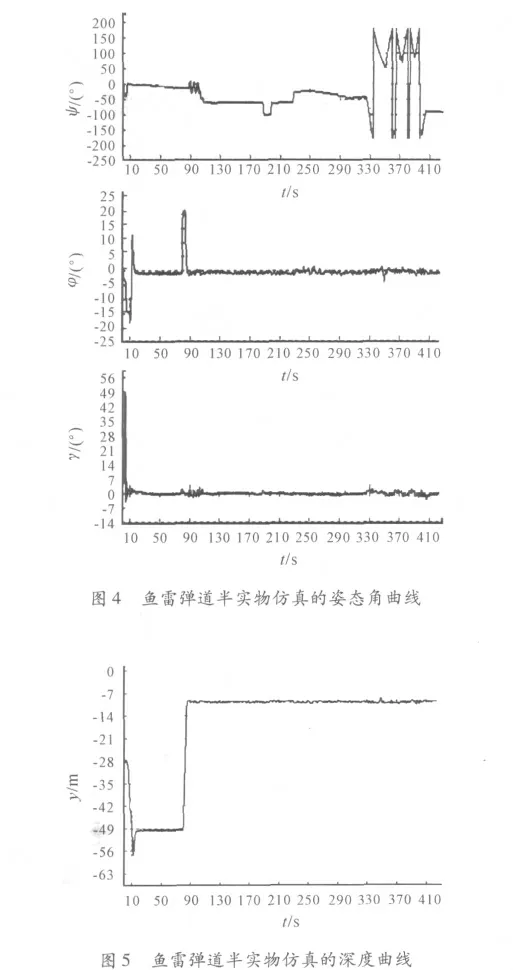
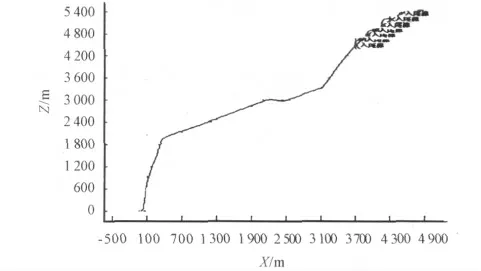
圖6 魚雷水平面彈道半實物仿真曲線
對仿真結果進行分析可知,對于作勻速直線運動的水面艦船,魚雷在發射出管后能夠搜索到目標尾流,不斷地進出目標尾流并接近目標,最后命中目標。半實物仿真結果驗證了所設計的仿真試驗系統能夠完成魚雷武器控制系統的仿真試驗,各項功能指標均達到和滿足魚雷控制系統的要求。
[1]黃柯棣.系統仿真技術[M].長沙:國防科學技術大學出版社,1998.
[2]石秀華,王曉娟.水中兵器概論(魚雷分冊)[M].西安:西北工業大學出版社,2005.
[3]徐德民.魚雷自動控制系統[M].2 版.西安:西北工業大學出版社,2006.
[4]王行仁.飛行實時仿真系統及技術[M].北京:北京航空航天大學出版社,2003.
[5]孔德永,某制導航空彈藥自動駕駛儀設計研究[D].長沙:國防科技大學,2005.
[6]吳朝暉,王凈,宋保維,等.魚雷武器系統作戰效能的多指標綜合評估模型[J].火力與指揮控制,2009(3):67-70.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
