多攔截器總體攔截方案設(shè)計(jì)與分析
2012-06-22 07:01:00劉魯華湯國(guó)建
北京航空航天大學(xué)學(xué)報(bào) 2012年3期
謝 愈 劉魯華 湯國(guó)建
(國(guó)防科學(xué)技術(shù)大學(xué) 航天與材料工程學(xué)院,長(zhǎng)沙 410073)
崔俊峰
(中國(guó)太原衛(wèi)星發(fā)射中心,太原 030027)
多攔截器總體攔截方案設(shè)計(jì)與分析
謝 愈 劉魯華 湯國(guó)建
(國(guó)防科學(xué)技術(shù)大學(xué) 航天與材料工程學(xué)院,長(zhǎng)沙 410073)
崔俊峰
(中國(guó)太原衛(wèi)星發(fā)射中心,太原 030027)
多攔截器(MKV,Multiple Kill Vehicle Interceptor)通過采用一個(gè)運(yùn)載母?jìng)}攜帶多個(gè)小型動(dòng)能攔截器對(duì)目標(biāo)實(shí)施動(dòng)能攔截,有望克服傳統(tǒng)動(dòng)能攔截武器多目標(biāo)識(shí)別及攔截的難題.以MKV對(duì)遠(yuǎn)程彈道導(dǎo)彈多彈頭中段攔截為背景,設(shè)計(jì)了MKV的總體方案,分析了MKV基本作戰(zhàn)流程;并分別針對(duì)MKV制導(dǎo)策略、釋放策略、MKV機(jī)動(dòng)能力對(duì)攔截的影響以及MKV目標(biāo)分配策略等幾個(gè)關(guān)鍵問題開展研究.仿真分析表明,采用所設(shè)計(jì)的MKV方案能夠?qū)崿F(xiàn)對(duì)遠(yuǎn)程彈道導(dǎo)彈多彈頭的攔截.
多攔截器;攔截方案;多攔截器制導(dǎo);多攔截器釋放;多目標(biāo)分配
近年來,動(dòng)能攔截武器的發(fā)展取得了長(zhǎng)足進(jìn)步,并進(jìn)入實(shí)際部署階段.傳統(tǒng)的動(dòng)能攔截武器一般是通過一枚攔截彈攜帶單個(gè)動(dòng)能攔截器對(duì)目標(biāo)實(shí)施攔截,在應(yīng)對(duì)彈道導(dǎo)彈多彈頭分導(dǎo)、釋放誘餌等突防模式時(shí)存在較大難度.為了克服這個(gè)問題,美國(guó)本世紀(jì)初開始著手研究一種稱為多攔截器(MKV,Multiple Kill Vehicle Interceptor)[1-2]的新型動(dòng)能攔截武器.據(jù)稱它能夠利用一個(gè)運(yùn)載器發(fā)射若干個(gè)小的動(dòng)能攔截器對(duì)一定范圍內(nèi)所有被認(rèn)為是威脅的目標(biāo)實(shí)施攔截,也即使得動(dòng)能攔截模式由傳統(tǒng)的“狙擊槍型”轉(zhuǎn)向“霰彈槍型”,從而回避了真假目標(biāo)識(shí)別的難題,并且只需發(fā)射一枚攔截彈即可實(shí)現(xiàn)同時(shí)對(duì)一定范圍內(nèi)多個(gè)目標(biāo)的攔截,降低了成本.
美國(guó)同時(shí)對(duì)兩種MKV方案開展了研究,即雷聲(Raytheon)公司的MKV-R方案和洛克希德·馬丁(Lockheed Martin)公司的MKV-L方案.MKV-R采用先導(dǎo)者-后續(xù)者的方案,第1枚攔截器作為先導(dǎo)者對(duì)目標(biāo)進(jìn)行評(píng)估,并作為整個(gè)攔截任務(wù)的指揮者,指派后面各個(gè)攔截器對(duì)目標(biāo)實(shí)施攔截.MKV-L方案是最終確定的方案,由一個(gè)母?jìng)}攜帶多個(gè)微小攔截器組成.微小攔截器大小相當(dāng)于一個(gè)咖啡罐,重4~6 kg.母?jìng)}和每個(gè)微小攔截器均帶有目標(biāo)探測(cè)器.接近目標(biāo)群時(shí),運(yùn)載母艙釋放微小攔截器,各微小攔截器運(yùn)用成像傳感器子系統(tǒng)選擇一個(gè)合理的碰撞點(diǎn),然后向目標(biāo)點(diǎn)飛行并進(jìn)行最后的碰撞攔截[2].雖然由于資金上的原因及戰(zhàn)略上調(diào)整,美國(guó)政府2010年暫停了對(duì)MKV研究計(jì)劃的資助,但是MKV作為一種彈道導(dǎo)彈防御新模式,有望從根本上解決傳統(tǒng)彈道導(dǎo)彈防御模式的不足,具有巨大的軍事應(yīng)用前景,必將成為彈道導(dǎo)彈防御的新銳.
在參考美國(guó)MKV-L基本思路的基礎(chǔ)上,以MKV對(duì)遠(yuǎn)程彈道導(dǎo)彈多彈頭中段攔截為背景,設(shè)計(jì)了MKV總體方案.重點(diǎn)針對(duì)MKV制導(dǎo)策略、MKV釋放策略、MKV機(jī)動(dòng)能力對(duì)攔截的影響、MKV目標(biāo)分配策略等幾個(gè)關(guān)鍵問題展開研究,得出了一些有意義的結(jié)論,可為MKV總體方案確定及進(jìn)一步深入研究提供參考.
1 MKV總體方案及基本作戰(zhàn)流程
圖1為MKV對(duì)彈道導(dǎo)彈多彈頭中段攔截示意圖.
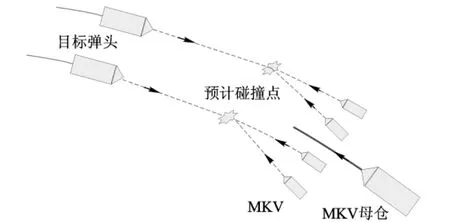
圖1 MKV攔截示意圖
假設(shè)彈道導(dǎo)彈多彈頭中段飛行無機(jī)動(dòng),各彈頭對(duì)應(yīng)落點(diǎn)散布范圍不超過300 km,彈頭數(shù)不超過5枚.由于MKV為中段攔截,攔截時(shí)各目標(biāo)彈頭間相距不會(huì)太遠(yuǎn).另外,在釋放MKV前,MKV母?jìng)}能夠進(jìn)行初略制導(dǎo),并調(diào)整母?jìng)}的姿態(tài),以滿足MKV釋放要求.在此假設(shè)下,制定MKV攔截系統(tǒng)的基本方案如下:整個(gè)MKV攔截系統(tǒng)由一個(gè)運(yùn)載母?jìng)}攜帶5~10枚小型MKV組成.MKV攔截系統(tǒng)具備獨(dú)立的跟蹤探測(cè)能力,母?jìng)}配置了遠(yuǎn)程探測(cè)設(shè)備以實(shí)現(xiàn)對(duì)目標(biāo)的捕獲和跟蹤測(cè)量,并安裝了軌控和姿控發(fā)動(dòng)機(jī)進(jìn)行制導(dǎo)和姿態(tài)控制.設(shè)定每個(gè)MKV質(zhì)量為10 kg,其中燃料4.5 kg.MKV的大小根據(jù)母?jìng)}大小、MKV數(shù)目及MKV上各設(shè)備的小型化水平加以確定.各MKV均安裝導(dǎo)引頭,可探測(cè)范圍0.1~60 km.MKV軌控推力由噴嘴“+”字形配置安裝在質(zhì)心位置的發(fā)動(dòng)機(jī)提供,每個(gè)噴嘴推力固定為1000 N,比沖量為300 s.
MKV運(yùn)載母?jìng)}的功能包括對(duì)目標(biāo)的捕獲和跟蹤探測(cè),并根據(jù)目標(biāo)的相關(guān)運(yùn)動(dòng)特性,實(shí)現(xiàn)目標(biāo)威脅評(píng)估、目標(biāo)攔截分配、MKV釋放等,必要時(shí)還可對(duì)MKV最終的攔截效果進(jìn)行評(píng)估,并將評(píng)估結(jié)果反饋給地面指控中心.MKV基本作戰(zhàn)流程如圖2所示.
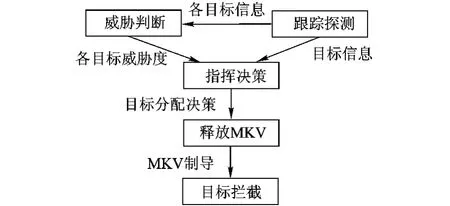
圖2 MKV基本作戰(zhàn)流程
跟蹤探測(cè)系統(tǒng)捕獲目標(biāo)并進(jìn)行跟蹤探測(cè),將目標(biāo)信息傳遞給威脅判斷系統(tǒng);威脅判斷系統(tǒng)據(jù)此分析各個(gè)目標(biāo)的威脅度;指揮決策系統(tǒng)依據(jù)跟蹤探測(cè)系統(tǒng)提供的目標(biāo)信息、威脅判斷系統(tǒng)提供的各目標(biāo)威脅度,生成目標(biāo)分配決策,為每個(gè)目標(biāo)分配合適的MKV;母?jìng)}依據(jù)目標(biāo)分配決策,在適當(dāng)?shù)臅r(shí)機(jī)釋放MKV,對(duì)目標(biāo)進(jìn)行攔截;MKV釋放后,配置在母?jìng)}前面,當(dāng)MKV和目標(biāo)接近到一定程度后,MKV開始進(jìn)行制導(dǎo),實(shí)現(xiàn)對(duì)目標(biāo)彈頭的攔截.
2 MKV制導(dǎo)策略
2.1 中制導(dǎo)方法
MKV中制導(dǎo)的目的是使攔截終端預(yù)測(cè)脫靶量在MKV末制導(dǎo)的修偏范圍內(nèi),因此對(duì)制導(dǎo)精度要求不高.MKV中制導(dǎo)采用基于預(yù)測(cè)零控脫靶量的制導(dǎo)方法[3].在當(dāng)前時(shí)刻 tp預(yù)報(bào)脫靶量ρm(tp,t*),即滿足:

其中t*為預(yù)測(cè)命中時(shí)刻.

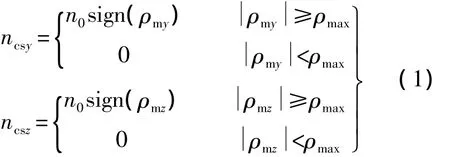
式中,n0為軌控發(fā)動(dòng)機(jī)能提供的機(jī)動(dòng)過載;ncsy,ncsz分別為 MKV 法向和側(cè)向過載;ρmy,ρmz分別為ρm(tp,t*)在MKV視線坐標(biāo)系法向、側(cè)向的分量.
2.2 末制導(dǎo)方法
根據(jù)前面所制定的總體方案,MKV發(fā)動(dòng)機(jī)“+”字形對(duì)稱配置,推力為常值,因此本文采用側(cè)向常推力比例導(dǎo)引開關(guān)控制方法.發(fā)動(dòng)機(jī)控制規(guī)律如下[3]:

式中,ωy,ωz分別為視線轉(zhuǎn)率在MKV視線坐標(biāo)系法向和側(cè)向上的分量;ωon,ωoff為軌控發(fā)動(dòng)機(jī)開關(guān)時(shí)的視線轉(zhuǎn)率閾值;t為當(dāng)前時(shí)刻,t-Δt為t之前的瞬時(shí).當(dāng)進(jìn)入MKV導(dǎo)引頭測(cè)量盲區(qū)時(shí),令ncsy=ncsz=0.
2.3 制導(dǎo)策略分析
由于目標(biāo)彈頭和MKV均有多個(gè),下面選擇一個(gè)典型目標(biāo)彈頭和MKV為例進(jìn)行分析.MKV對(duì)該彈頭的零控脫靶量約24 km,兩者相對(duì)速度約10 km/s.這種情況下需引入中制導(dǎo)才能實(shí)現(xiàn)對(duì)目標(biāo)彈頭的攔截(下文分析與此同).
設(shè)距目標(biāo)彈頭400 km和60 km時(shí)分別啟動(dòng)中制導(dǎo)和末制導(dǎo),當(dāng)預(yù)測(cè)脫靶量小于500 m時(shí)結(jié)束中制導(dǎo).圖3和圖4分別給出了MKV脫靶量Lm及燃料消耗量Mf與中制導(dǎo)和末制導(dǎo)啟動(dòng)時(shí)機(jī)(分別用制導(dǎo)啟動(dòng)時(shí)MKV與目標(biāo)彈頭的相對(duì)距離L1和L2衡量)的關(guān)系.
由圖3可以看出,中制導(dǎo)應(yīng)在距目標(biāo)大于350 km時(shí)啟動(dòng),啟動(dòng)太晚,發(fā)動(dòng)機(jī)燃料將提前消耗完,無法完成末制導(dǎo).另外,一定范圍內(nèi)中制導(dǎo)啟動(dòng)時(shí)機(jī)越早,燃料消耗也越少.由圖4可知,MKV應(yīng)在距彈頭大于40 km時(shí)開始末制導(dǎo),但末制導(dǎo)啟動(dòng)也不能太早,否則會(huì)對(duì)導(dǎo)引頭探測(cè)距離有更高的要求.根據(jù)所確定的總體方案,在距目標(biāo)40~60 km啟動(dòng)末制導(dǎo)比較合適,此時(shí)燃料消耗約3.85 kg,滿足設(shè)計(jì)要求.
3 MKV釋放策略
MKV釋放策略包括MKV釋放速度和釋放時(shí)機(jī)兩方面,其中釋放速度又包括釋放速度大小及釋放方位.不同的釋放策略對(duì)MKV釋放后的空域布局、MKV的攔截效果等有直接影響.沿著MKV母?jìng)}彈軸方向看,MKV釋放方式如圖5所示.各MKV釋放速度大小為δv,為了確保釋放后各MKV配置在母?jìng)}前面飛行,MKV釋放速度方向與彈軸x的夾角小于90°.
從MKV釋放時(shí)機(jī)來說,有兩種釋放方式.一種是在發(fā)現(xiàn)目標(biāo)彈頭之前釋放MKV,使MKV伴飛于母?jìng)}周圍,當(dāng)MKV母?jìng)}上的探測(cè)裝置發(fā)現(xiàn)目標(biāo)彈頭后,母?jìng)}作戰(zhàn)指控系統(tǒng)分配MKV對(duì)其進(jìn)行攔截.這種釋放策略的優(yōu)點(diǎn)是反應(yīng)速度快,一旦發(fā)現(xiàn)目標(biāo)后,馬上可由指控決策系統(tǒng)指派MKV對(duì)其進(jìn)行攔截,從而一定程度上可降低對(duì)母?jìng)}探測(cè)距離的要求,缺點(diǎn)是過早的釋放MKV,增加了MKV和母?jìng)}間信息交互及指控的難度;另一種釋放策略是母?jìng)}在探測(cè)到目標(biāo)后,再在合適的時(shí)機(jī)釋放MKV進(jìn)行攔截,這種方式針對(duì)性比較強(qiáng),但反應(yīng)速度不夠快,因此需較早的發(fā)現(xiàn)目標(biāo).
圖5 MKV釋放示意圖
MKV脫靶量Lm及燃料消耗量Mf與MKV釋放策略有一定關(guān)系.圖6和圖7分別對(duì)應(yīng)MKV釋放速度大小為30 m/s、速度方向與母?jìng)}彈軸夾角為45°情況下,Lm及Mf與釋放時(shí)機(jī)(用MKV釋放時(shí)與目標(biāo)的相對(duì)距離Lr衡量)和釋放速度大小Vr的關(guān)系.
圖6 脫靶量與釋放時(shí)機(jī)和釋放速度的關(guān)系
圖7 燃料消耗量與釋放時(shí)機(jī)和釋放速度的關(guān)系
由圖6和圖7可看出,在考慮中制導(dǎo)的情況下,MKV釋放速度和釋放時(shí)機(jī)選擇范圍較大,但當(dāng)釋放速度過大且釋放時(shí)機(jī)過早,會(huì)因?yàn)榘l(fā)動(dòng)機(jī)燃料不足而無法實(shí)施對(duì)彈頭的攔截.
4 MKV機(jī)動(dòng)能力影響
為確保對(duì)彈頭的攔截,MKV需要具備較強(qiáng)的機(jī)動(dòng)能力.MKV機(jī)動(dòng)能力與軌控發(fā)動(dòng)機(jī)推力大小及燃料質(zhì)量(或發(fā)動(dòng)機(jī)工作時(shí)間)有關(guān).圖8為假設(shè)MKV釋放速度為30 m/s,MKV脫靶量Lm與軌控發(fā)動(dòng)機(jī)推力大小P和燃料質(zhì)量Mf的關(guān)系.由圖可知,為保證MKV對(duì)彈頭實(shí)施攔截,軌控發(fā)動(dòng)機(jī)燃料總質(zhì)量不少于3.85 kg,推力應(yīng)大于600 N,可見本文所制定的MKV基本方案滿足上述要求.
圖8 MKV脫靶量與推力及燃料的關(guān)系
5 目標(biāo)分配策略
針對(duì)多個(gè)目標(biāo)彈頭,需釋放多個(gè)MKV進(jìn)行攔截,這就涉及到目標(biāo)分配策略的問題.目標(biāo)分配策略的關(guān)鍵是對(duì)目標(biāo)威脅進(jìn)行評(píng)估,并確定相應(yīng)的目標(biāo)分配原則.
5.1 目標(biāo)威脅評(píng)估
對(duì)防御方來說,同時(shí)進(jìn)攻的多個(gè)彈頭的“嚴(yán)重性”和“緊迫性”一般會(huì)有所差別,給予“嚴(yán)重性”和“緊迫性”以定量的描述稱為彈頭的威脅度[4].利用威脅度,可以區(qū)別多個(gè)目標(biāo)的輕重緩急,為MKV的目標(biāo)分配及攔截提供依據(jù).本文中,“嚴(yán)重性”可以用彈頭所打擊目標(biāo)的重要程度、彈頭的精度及彈頭的威力來綜合衡量;“緊迫性”可用從發(fā)現(xiàn)彈頭到彈頭命中目標(biāo)的時(shí)間來衡量.
1)“嚴(yán)重性”的定量描述方法
在不考慮彈頭機(jī)動(dòng)變軌情況下,可對(duì)目標(biāo)彈頭的落點(diǎn)位置進(jìn)行預(yù)測(cè),進(jìn)而可對(duì)彈頭的威脅進(jìn)行評(píng)估.
設(shè)目標(biāo)彈頭落點(diǎn)區(qū)域共有n個(gè)防御區(qū)域Oi(i=1,…,n).為研究方便,假設(shè)所有防御區(qū)域?yàn)榘霃絉'i的圓形,各個(gè)區(qū)域的重要度為Ii(∈[0,1]).彈頭 hj(j=1,2,…)預(yù)測(cè)落點(diǎn)到各防御區(qū)域中心的距離為ri.根據(jù)先驗(yàn)信息獲得彈頭毀傷半徑為Rj.
彈頭hj對(duì)防御區(qū)域Oi的摧毀能力采用如下函數(shù)描述:

式中,ki為常數(shù).
從“嚴(yán)重性”方面來說,彈頭hj的威脅ujf可表示為
2)“緊迫性”的定量描述方法彈頭hj待飛時(shí)間越短,留給MKV攔截的時(shí)間也越短,并且對(duì)MKV的機(jī)動(dòng)能力要求也越高,從而可認(rèn)為彈頭威脅度也越大.從待飛時(shí)間方面考慮,若大于某一值tmax時(shí),認(rèn)為彈頭不構(gòu)成威脅.一般情況下,可取tmax為探測(cè)系統(tǒng)最大探測(cè)距離對(duì)應(yīng)的彈頭待飛時(shí)間.設(shè)某時(shí)刻通過探測(cè)設(shè)備獲得彈頭hj的位置和速度大小分別為則待飛時(shí)間
定義彈頭hj待飛時(shí)間對(duì)應(yīng)的威脅度相對(duì)隸屬度函數(shù)為
3)彈頭威脅度的確定
根據(jù)彈頭“嚴(yán)重性”和“緊迫性”兩方面的定量描述,可確定彈頭hj的威脅度為

式中,αf,αt分別為“嚴(yán)重性”和“緊迫性”對(duì)應(yīng)的權(quán)重值,且 αf+αt=1.
5.2 目標(biāo)分配原則
令MKV數(shù)目為M,彈頭數(shù)目為N,目標(biāo)分配的原則是優(yōu)先攔截威脅度最大的彈頭,目標(biāo)函數(shù)表示為
式中,pij∈[0,1]為第 i個(gè) MKV 對(duì)第 j個(gè)彈頭的攔截能力評(píng)估值;ωj為第j個(gè)彈頭的威脅度.對(duì)式(8)所述的優(yōu)化問題,如果MKV和彈頭數(shù)目較少,可采用枚舉方法直接求解,當(dāng)MKV和彈頭數(shù)目較多時(shí),多采用遺傳算法、蟻群算法等進(jìn)行求解[6-8].
5.3 多目標(biāo)攔截分析
設(shè)有4個(gè)目標(biāo)彈頭,平臺(tái)釋放6個(gè)MKV對(duì)其進(jìn)行攔截.MKV釋放速度大小為30 m/s,速度方向與母?jìng)}彈軸夾角為45°.從圖5中z軸位置開始,沿逆時(shí)鐘方向依次將6個(gè)MKV編號(hào)為MKV1~MKV6.根據(jù)前面的分析,MKV采用中制導(dǎo)+末制導(dǎo)的制導(dǎo)方案.假定各個(gè)MKV對(duì)目標(biāo)彈頭的攔截能力相同,并取式(3)中ki=0.2231.不考慮落點(diǎn)預(yù)測(cè)誤差,設(shè)定防御區(qū)1和防御區(qū)2的重要程度分別為0.9和0.8,各目標(biāo)彈頭對(duì)應(yīng)落點(diǎn)與防御區(qū)域關(guān)系如圖9所示.
圖9 目標(biāo)彈頭對(duì)應(yīng)落點(diǎn)與防御區(qū)域位置關(guān)系
各彈頭的威脅度值及分配的彈頭數(shù)見表1.
表1 各彈頭的威脅度值及分配的彈頭數(shù)
設(shè)MKV探測(cè)方位誤差為白噪聲,標(biāo)準(zhǔn)差為0.2°,制導(dǎo)周期為 0.01 s.進(jìn)行 100 次 Monte Carlo仿真,統(tǒng)計(jì)各MKV對(duì)相應(yīng)彈頭的攔截脫靶量Lm及其標(biāo)準(zhǔn)差σL、燃料消耗量mf及其標(biāo)準(zhǔn)差σm如表2所示.由仿真結(jié)果可知,對(duì)威脅度最大的彈頭2和彈頭3,均分配兩個(gè)MKV進(jìn)行攔截,各MKV攔截效果較好,燃料消耗滿足設(shè)計(jì)要求.
表2 多彈頭攔截結(jié)果統(tǒng)計(jì)
6 結(jié)論
1)本文所制定的MKV攔截系統(tǒng)總體方案合理可行.
2)當(dāng)MKV相對(duì)于彈頭的零控脫靶量較大時(shí),需引入中制導(dǎo).為了適應(yīng)各種情況下的攔截需要,建議采用中制導(dǎo)+末制導(dǎo)的制導(dǎo)策略.
3)應(yīng)在合適的時(shí)機(jī)啟動(dòng)中制導(dǎo)和末制導(dǎo).中制導(dǎo)宜距目標(biāo)超過350 km啟動(dòng),而末制導(dǎo)距目標(biāo)40~60 km啟動(dòng)較好.
4)MKV釋放速度和釋放時(shí)機(jī)選擇范圍較寬,但均不能過大.
5)軌控發(fā)動(dòng)機(jī)推力和燃料質(zhì)量需滿足一定要求,選擇推力1 000 N,燃料質(zhì)量4.5 kg可滿足一般攔截要求,且留有一定余量.
(References)
[1]Rober W.Missile interceptors may carry dozens of kill[J].Aviation Week&Space Technology,2004,160(1):50-57
[2]Uka H K.Miniatureintercptortechnology[R].MDA-02-041,2002
[3]李翠蘭.地基攔截彈飛行彈道和控制建模與仿真[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué)航天與材料工程學(xué)院,2004
Li Cuilan.Modeling and simulation of trajectory and control for ground-based interceptor[D].Changsha:College of Aerospace and Material Engineering,National University of Defense Technology,2004(in Chinese)
[4]溫羨嶠,劉譚軍.反戰(zhàn)術(shù)彈道導(dǎo)彈(ATBM)防御系統(tǒng)指揮決策模型研究[J].現(xiàn)代防御技術(shù),1997(2):9-20
Wen Xianqiao,Liu Tanjun.Research on decision model for antitactics ballistic missile[J].Modern Defence Technology,1997(2):9-20(in Chinese)
[5]賈沛然,陳克俊,何力.遠(yuǎn)程火箭彈道學(xué)[M].長(zhǎng)沙:國(guó)防科技大學(xué)出版社,1993:103-104
Jia Peiran,Chen Kejun,He Li.Ballistics of long-range ballistic missile[M].Changsha:NationalUniversity ofDefense Technology Press,1993:103-104(in Chinese)
[6]Cai Huaiping,Liu Jingxu,Chen Yingwu,et al.Survey of the research on dynamic weapon-target assignment problem[J].Journal of Systems Engineering and Electronics,2006,17(3):559-565
[7]Mekawey H I,Abd EL-Wahab M S,Hashem M.Novel goal-based weapon target assignment doctrine[J].Journal of Aerospace Computing,Information,and Communication,2009,6:2-29
[8]Wang Yanxia,Qian Longjun,Guo Zhi,et al.Weapon target assignment problem satisfying expected damage probabilities based on ant colony algorithm[J].Journal of Systems Engineering and Electronics,2008,19(5):939-944
Design and analysis of interception project for multiple kill vehicle interceptor
Xie Yu Liu Luhua Tang Guojian
(College of Aerospace and Materials Engineering,National University of Defense Technology,Changsha 410073,China)
Cui Junfeng
(Taiyuan Satellite Launch Center,Taiyuan 030027,China)
The multiple kill vehicle(MKV)interceptor consists of a carrier vehicle and some small kill vehicles that can intercept targets independently.It is capable of solving the difficulties of traditional kinetic energy interceptor,such as multiple targets identification and interception.The interception project of MKV interceptor was designed based on midcourse interception for multiple warheads of long-range ballistic missile,and the MKV-target engagement process was analyzed.Furtherly,some key issues such as MKV guidance strategy,MKV release strategy,influence of maneuverability on interception,and targets assignment strategy were studied.The simulations demonstrate that the designed interception project is adaptable of multiple warheads interception for a long-range ballistic missile.
multiple kill vehicle interceptor;interception project;MKV guidance;MKV release;target assignment
2010-11-24;網(wǎng)絡(luò)出版時(shí)間:2012-03-28 15:12
www.cnki.net/kcms/detail/11.2625.V.20120328.1512.002.html
謝 愈(1982-),男,湖南寧鄉(xiāng)人,博士生,xieyu_nudt@139.com.
V 448
A
1001-5965(2012)03-0303-06
(編 輯:張 嶸)
猜你喜歡
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
鐵道通信信號(hào)(2020年9期)2020-02-06 09:15:22
小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14