利用一次雷達實現(xiàn)低空空域的安全監(jiān)視
2012-06-22 06:59:46陳唯實寧煥生
北京航空航天大學學報 2012年2期
陳唯實 寧煥生
(北京航空航天大學 電子信息工程學院,北京 100191)
利用一次雷達實現(xiàn)低空空域的安全監(jiān)視
陳唯實 寧煥生
(北京航空航天大學 電子信息工程學院,北京 100191)
介紹了一種低成本的低空空域雷達監(jiān)視實驗系統(tǒng),并提出了一種基于雷達平面位置指示(PPI,Plane Position Indicator)圖像的目標檢測與跟蹤算法,其中雜波抑制和目標狀態(tài)估計是兩項關(guān)鍵技術(shù).經(jīng)過背景差分的雷達PPI圖像,仍然含有大量的背景邊緣雜波,該算法利用其空域特性進行雜波抑制,并采用交互式多模型(IMM,Interactive Multiple Models)方法對目標的勻速、加速、減速、轉(zhuǎn)彎等機動運動進行跟蹤.詳細分析了仿真數(shù)據(jù)的跟蹤效果,并將整套算法應用于兩組實測PPI圖像,實驗結(jié)果說明其有效性.
低空空域;雷達;檢測;跟蹤;交互式多模型
低空空域通常是指3 000 m以下通用航空飛行活動的范圍,我國空管部門將在“十二五”規(guī)劃中逐步推動其全面開放.低空航空器目標小、機動性高、自主性強,如果擅自飛行,難以準確掌握其飛行動態(tài);同時,低空空域緊鄰地表,受地形影響,現(xiàn)有地面設(shè)施難以對低空航空器進行連續(xù)不間斷的監(jiān)視.因此,低空空域成為空中安全防衛(wèi)和監(jiān)視的薄弱環(huán)節(jié).隨著低空空域管理改革的深入,對低空飛行活動的限制將逐步放松,低空飛行活動的多樣化和靈活性對國家空防安全保障提出了挑戰(zhàn).對重要敏感目標、人口密集城鎮(zhèn)、邊境地帶、沿海等區(qū)域的低空飛行活動的監(jiān)視能力亟待加強.針對低空飛行的特點,低空空域安全監(jiān)視的主要手段包括新型低空一次雷達、無源探測、浮空器探測和多源綜合監(jiān)視等技術(shù)[1].一次雷達是依靠自身發(fā)射無線電脈沖,通過檢測目標對脈沖的反射信號確定目標方位距離的一種無線電探測設(shè)備,其具有成本低、架設(shè)方便、獨立工作性強等特點,是低空空域安全監(jiān)視的重要手段.
本文將討論一種基于一次雷達的低空空域監(jiān)視實驗系統(tǒng).第1部分首先簡述成熟的一次雷達低空空域監(jiān)視系統(tǒng),然后介紹本實驗系統(tǒng)的框架;第2部分詳細討論作為系統(tǒng)核心技術(shù)的低空目標檢測與跟蹤算法,經(jīng)過背景差分的一次雷達圖像仍還有大量雜波,其主要分布于背景的邊緣區(qū)域,因此,本算法中的雜波抑制部分針對一次雷達圖像雜波分布的特點,利用空域特性檢測目標并剔除虛警,進而利用時域特性進行目標狀態(tài)估計;第3部分分別對仿真數(shù)據(jù)和雷達實測數(shù)據(jù)進行處理與分析;最后作出結(jié)論.
1 低空空域雷達監(jiān)視系統(tǒng)
低空空域雷達監(jiān)視系統(tǒng)具有廣泛的應用前景.對于我國現(xiàn)有的預警探測網(wǎng)未能覆蓋的重點區(qū)域,可選擇性地布防低空一次雷達監(jiān)視系統(tǒng),彌補其監(jiān)視盲區(qū).另外,一次雷達系統(tǒng)可通過浮空器(飛艇、預警飛機等)搭載升至幾百至幾千米的高空,形成航空應急救援體系中臨時的飛行安全管制平臺.
1.1 國外成熟系統(tǒng)
目前,基于一次雷達的低空空域監(jiān)視系統(tǒng)國際上已有應用,并出現(xiàn)了一些成熟系統(tǒng).其中,De-Tect研制的 HARRIER系統(tǒng)[2]和 Sicom研制的ACCIPITER系統(tǒng)[3]是其典型代表,如圖1所示.

圖1 國外成熟的低空空域雷達監(jiān)視系統(tǒng)
一次雷達本身不具備動目標檢測和跟蹤的功能,成熟的低空空域雷達監(jiān)視系統(tǒng)通常采用一部低成本的一次雷達,由圖像采集卡將雷達平面位置指示(PPI,Plane Position Indicator)圖像傳輸給計算機,再由后端的雷達多目標檢測與跟蹤算法對其進行處理,從中提取出動目標信息.由于系統(tǒng)監(jiān)視的區(qū)域為低空空域,背景環(huán)境復雜,噪聲干擾強,而被跟蹤目標一般是回波信號較弱的小型飛行器,優(yōu)良的檢測與跟蹤算法成為提高系統(tǒng)探測能力的關(guān)鍵.
1.2 實驗系統(tǒng)
現(xiàn)階段,我國空管部門缺乏低空空域的監(jiān)視手段,軍民航同時建設(shè)各自的保障設(shè)施,且覆蓋面很不均衡;加之通用航空器機載設(shè)備簡單,飛行高度低,導致現(xiàn)行空管保障手段無法對其進行實時跟蹤監(jiān)視[4].本文搭建的“低空空域雷達監(jiān)視實驗系統(tǒng)”如圖2所示.該系統(tǒng)采用的X波段海事雷達屬于一次雷達,無需機載設(shè)備的協(xié)同工作,適于對通用航空器實施跟蹤監(jiān)視.

圖2 低空空域雷達監(jiān)視實驗系統(tǒng)
低空目標包括生物(如飛鳥)和非生物(如飛行器)兩大類.本系統(tǒng)已經(jīng)成功地應用于機場鳥擊防范,基于水平和垂直兩種掃描方式進行了大量探鳥實驗,驗證了其對生物目標的探測能力[5].同樣,本文利用該系統(tǒng)進行低空飛行器等目標的探測,實現(xiàn)低空空域安全監(jiān)視.第2部分詳述的低空目標檢測與跟蹤算法是該系統(tǒng)的核心技術(shù),其以飛鳥目標檢測與信息提取技術(shù)為基礎(chǔ)[6],針對雷達PPI圖像的特點,在雜波抑制和目標狀態(tài)估計兩方面進行了補充完善,顯著提高了算法性能.
2 低空目標檢測與跟蹤算法
基于雷達PPI圖像的低空目標檢測與跟蹤算法流程見圖3,算法主要包括動目標檢測和目標跟蹤兩大部分,將低空目標軌跡和速度信息從復雜的雷達圖像中提取出來并與衛(wèi)星地圖或坐標系疊加,生成便于觀測的融合圖像.
經(jīng)過背景差分的雷達圖像,去除了主要的背景信息,但仍含有大量邊緣雜波,本算法結(jié)合目標和雜波的空域特性,使邊緣雜波得到了有效抑制,詳細討論見2.1節(jié).低空空域安全監(jiān)視要求獲得機動目標的運動軌跡,并對其運動趨勢做出預測.目標跟蹤算法基于量測值,采用交互式多模型(IMM,Interactive Multiple Models)對低空目標的勻速、加速、減速、轉(zhuǎn)彎等機動特性進行精確預估和校準,詳細討論見2.2節(jié).
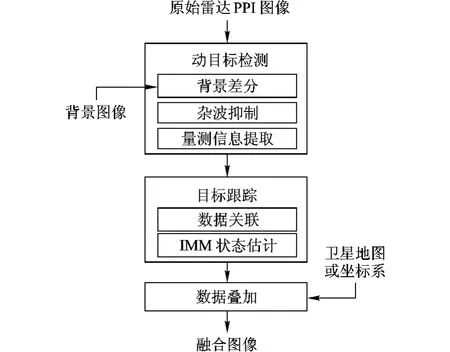
圖3 低空目標檢測與跟蹤算法流程圖
2.1 基于空域特性的雜波抑制
由于背景中的大部分物體(草地、樹林、建筑物等)是非剛性的,因此其邊緣回波具有一定的隨機特性,經(jīng)過背景差分的雷達圖像中,除動目標外,在原先的背景邊緣仍殘留了大量雜波,且其強度一般較高,給小弱動目標的檢測帶來一定困難.通常,為提高系統(tǒng)的“檢測率”,傳統(tǒng)的飛鳥目標檢測算法會設(shè)定較低的閾值,同時也引入了大量雜波,通過采用優(yōu)良的跟蹤算法剔除雜波,最終實現(xiàn)對小弱目標的跟蹤.但是,此種方案會給跟蹤算法帶來過重的負擔,嚴重影響算法的效率,較難實現(xiàn)實時處理[7-8].
本文利用雜波和低空目標的空域分布特性,建立一種新的雜波抑制方法,有別于傳統(tǒng)的全局或局部閾值分割方法.在空域中,低空空域目標一般出現(xiàn)在相對獨立的空間內(nèi),其鄰域沒有背景信息;雜波則分布在背景邊緣,空域分布特征明顯,即使其灰度值強于目標,仍然可與目標相區(qū)別.因此,提出一種基于空域分布特性的低空目標檢測方法,采用的目標檢測窗口如圖4所示.由式(1)計算Nout×Nout和Nin×Nin之間的陰影區(qū)域的像素平均灰度值D(i,j,k)表示第k幀圖像中待檢測像素的坐標值.

其中,Mout代表外側(cè)矩形框內(nèi)的像素灰度值之和;Min代表內(nèi)側(cè)矩形框內(nèi)的像素灰度值之和,分別由下式計算:

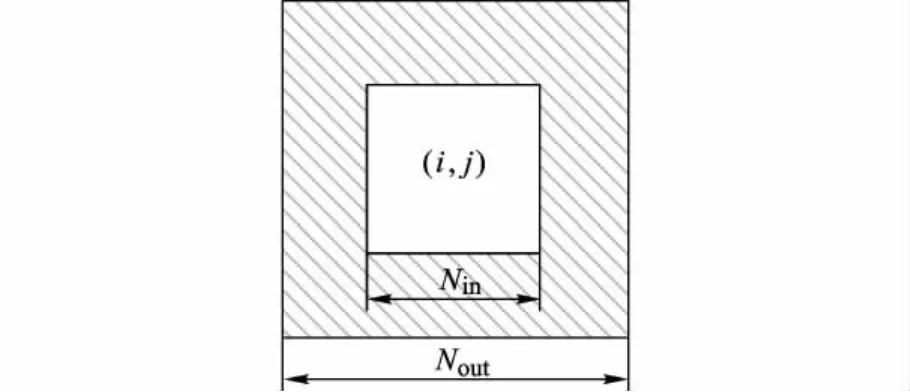
圖4 目標檢測窗口

式中,G(·)是原始雷達圖像中像素的灰度值.值得注意的是,并不需要對原始雷達圖像中的所有目標進行檢測,只需關(guān)注那些差分圖像中殘留的高亮像素(包括A個雜波像素和B個目標像素),其坐標值(i,j)由差分圖像提供,但目標檢測在原始圖像中進行,并設(shè)定相應閾值S,由下式對該像素點是否屬于目標進行判斷

目標像素標定為1,雜波像素標定為0.在A個雜波像素中,有F個被標定為目標,稱之為虛警;在B個目標像素中,有T個被標定為雜波,稱之為漏警;將虛警率(PFA,Probability of False Alarms)和漏警率(PMD,Probability of Missing Detection)定義如下:

優(yōu)良的雜波抑制方法應當使Pfa和Pmd同時保持在較低的水平.
2.2 基于IMM的目標跟蹤
目標跟蹤包括數(shù)據(jù)關(guān)聯(lián)和目標狀態(tài)估計,數(shù)據(jù)關(guān)聯(lián)將動目標量測與目標航跡關(guān)聯(lián),排除雜波量測的干擾.本文將主要采用基于空域特性的雜波抑制方法,在動目標檢測階段就將雜波全部剔除,弱化數(shù)據(jù)關(guān)聯(lián)的作用,著眼于低空目標的機動狀態(tài)估計.從某種程度上說,目標狀態(tài)估計是跟蹤算法的關(guān)鍵.因為量測與航跡的關(guān)聯(lián)也需要知道量測到達時刻每條航跡的狀態(tài)預估值,否則量測與航跡的正確關(guān)聯(lián)幾乎是不可能的,精確的狀態(tài)預估值,是得到正確關(guān)聯(lián)的前提.
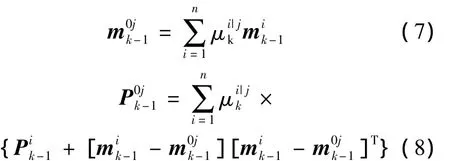
IMM方法是一種具有馬爾科夫切換系數(shù)的多模型目標狀態(tài)估計算法,多種模型并行工作,目標狀態(tài)估計是多個濾波器交互作用的結(jié)果.IMM濾波器主要包括交互作用、濾波和組合3個部分[9].每一時刻,通過混合上一時刻所有濾波器生成的狀態(tài)估計,獲得某種模型配置濾波器的初始條件,并假設(shè)該特定模型就是當前時刻的正確模型.然后針對每個模型采取標準的卡爾曼濾波,最后將所有濾波器生成的更新狀態(tài)估計進行加權(quán)組合,生成該時刻高斯密度狀態(tài)和協(xié)方差的最終估計.權(quán)重根據(jù)每個模型的概率確定,在算法的濾波部分計算完成.下面分述 IMM的3個組成部分:



然后,計算每個濾波器的混合輸入:
2)濾波.對每個模型Mi,濾波如下:

式中,標準卡爾曼濾波器的預估和更新分別用FP(·)和Fu(·)表示.除均值和協(xié)方差外,還計算了每個濾波器的測量相似性

其中,c是歸一化因子.
3)組合.計算狀態(tài)均值和協(xié)方差的組合估計
3 數(shù)據(jù)處理與分析
本部分首先將IMM應用于仿真跟蹤模型,驗證其對于多種運動模式的機動跟蹤能力.然后,采用低空目標檢測與跟蹤算法對雷達PPI圖像進行處理,并對其性能做出詳細分析.
3.1 跟蹤仿真模型
本節(jié)討論運動軌跡為“絲帶”型的轉(zhuǎn)彎運動模型.其思想是在狀態(tài)向量中加入轉(zhuǎn)彎率參數(shù)ω,將其與目標速度和位置等其它系統(tǒng)參數(shù)一起進行估計.
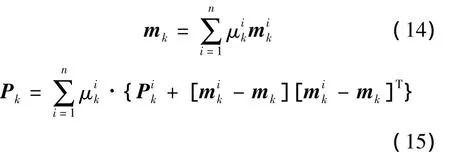
該模型132步,時間步長 Δt=0.1.目標在[-4,4]×[-4,4]的二維空間內(nèi)運動如下:目標從(-3.5,-2)出發(fā),速度為(1,0.6);4 s時,目標左轉(zhuǎn),速率為ω=1;9.3s時,目標停止轉(zhuǎn)彎,以恒定速度前進,直至運動結(jié)束;軌跡如圖5中實線所示.量測信息中附加了噪聲,以圓點表示.IMM將標準勻速模型1和轉(zhuǎn)彎模型2進行組合.勻速模型的過程噪聲方差設(shè)定為q=0.01,轉(zhuǎn)彎模型中的轉(zhuǎn)彎速率參數(shù)設(shè)定為qω=0.15.圖5中虛線為基于標準勻速模型1和基于IMM的濾波結(jié)果.經(jīng)過100次蒙特卡羅實驗,二者的均方誤差分別為0.0267和0.016 8,IMM 方法優(yōu)于單一模型的跟蹤方法,在很大程度上改善了估計結(jié)果.
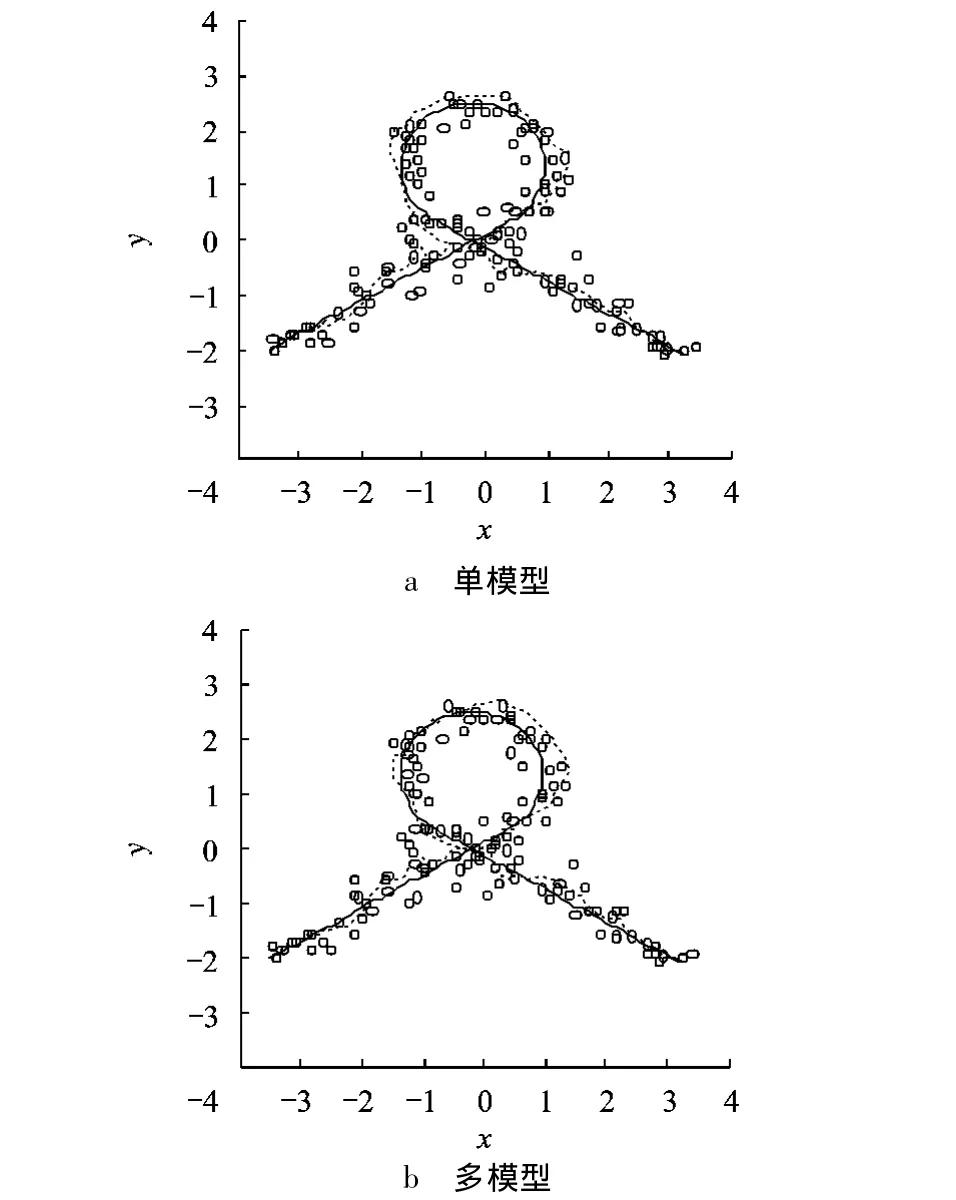
圖5 “絲帶”型轉(zhuǎn)彎模型跟蹤仿真
圖6給出了IMM中模型2的概率.當真實模型為1時,模型2的估計概率約50%,其原因可以解釋為轉(zhuǎn)彎模型為一種普適模型,當ω=0時,勻速模型1為轉(zhuǎn)彎模型2的特殊形式.圖7給出了IMM獲得的轉(zhuǎn)彎速率參數(shù)估計.
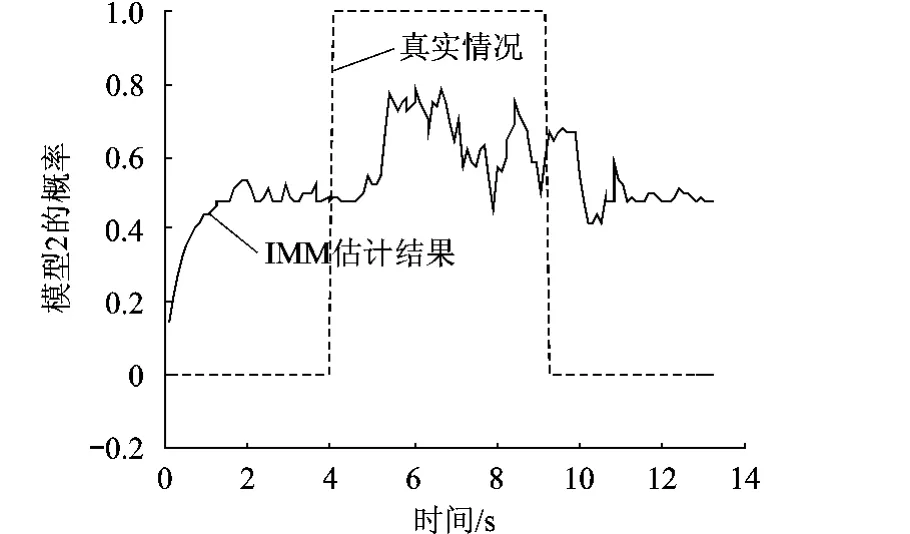
圖6 模型2的估計概率
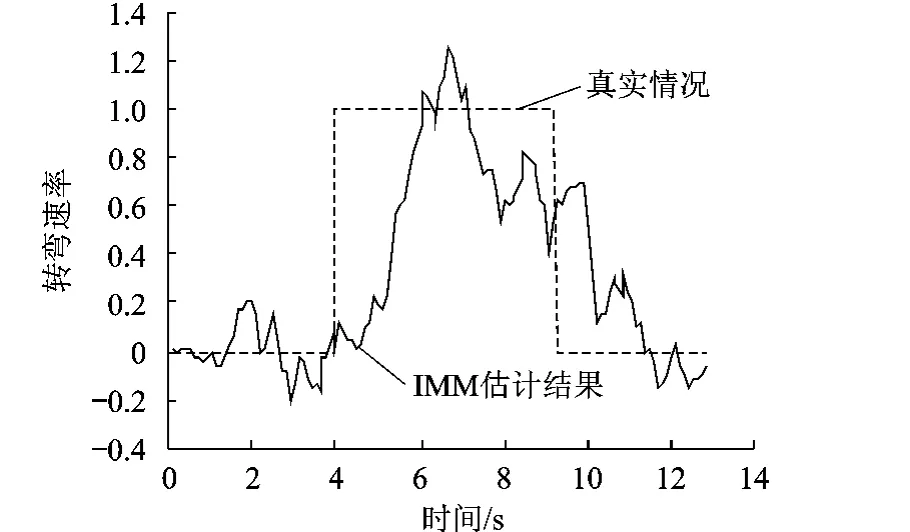
圖7 角速度的估計值
3.2 雷達PPI圖像處理
利用北航低空空域雷達監(jiān)視實驗系統(tǒng)于南陽機場進行了低空空域目標探測實驗,本系統(tǒng)放置在跑道一側(cè)的草坪上,采集了大量含有機動目標(車輛和飛行器)的雷達PPI圖像,下面分別對處理結(jié)果進行分析.
圖8描述了車輛目標檢測與跟蹤的全過程,該目標屬于小弱目標,其在雷達圖像中往往僅由幾個像素組成,且其灰度值甚至低于部分雜波信息,很難采用傳統(tǒng)的閾值分割方法進行檢測.圖8a是某圖像序列中的一幀,量程為0.25 nmile,除含有車輛目標外,還包含草地、樹林和建筑物等非剛性背景;經(jīng)過背景差分,去除了大部分背景信息,但仍殘留了大量邊緣雜波,部分像素亮度甚至高于目標,實驗結(jié)果如圖8b所示;基于空域特性對差分圖像進行雜波抑制,其目標檢測窗口Nin設(shè)定為11個像素,Nout設(shè)定為21個像素,Pfa和Pmd隨閾值S的變化情況如圖9所示,當S分別設(shè)置為 20,40,60,80 和 100 時,Pmd始終為 0,Pfa略有增加但也不高于0.02,圖8c是閾值設(shè)置為20時的雜波抑制結(jié)果,剔除了全部雜波并圈定目標;基于雜波抑制后提取的量測信息,采用IMM對動目標進行跟蹤,獲得的目標運動軌跡與衛(wèi)星地圖相疊加,獲得如圖8d所示的融合圖像(左上角為虛框內(nèi)局部放大圖像),圖中量測由圓點表示,目標估計位置由矩形方框標定,目標速度由一段直線表示,其長度代表了速度的大小.
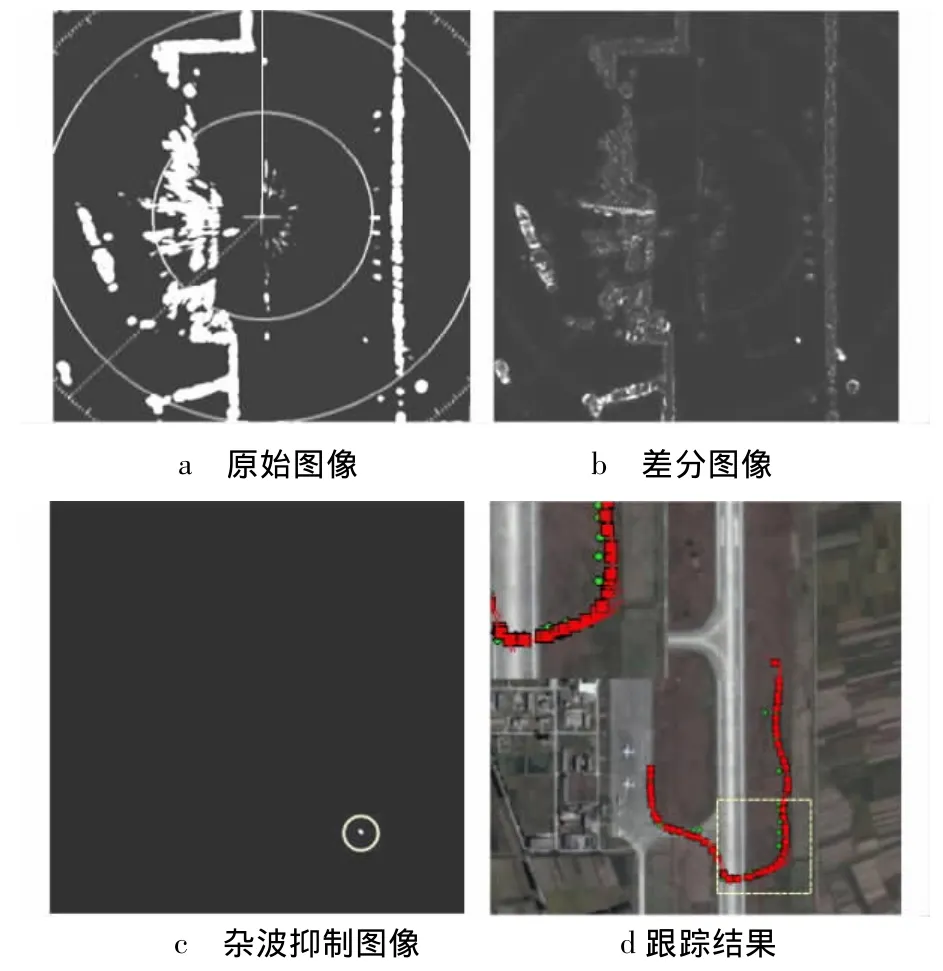
圖8 車輛目標檢測與跟蹤
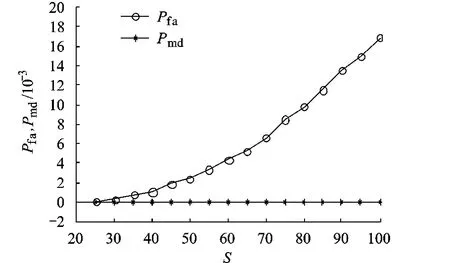
圖9 Pfa和Pmd隨閾值的變化情況
圖10是對某飛行器著陸進行檢測與跟蹤的結(jié)果.圖10a是一幀原始圖像,數(shù)據(jù)的處理過程與圖9所述相同,跟蹤結(jié)果如圖10b所示,飛行器目標完成了一次減速過程,每2.5s采集一幀圖像并進行處理,其在14幀連續(xù)圖像中的目標狀態(tài)見表1,包括目標位置(X,Y)和速度(Vx,Vy),圖像左下角為坐標原點,X軸水平向右,Y軸垂直向上.
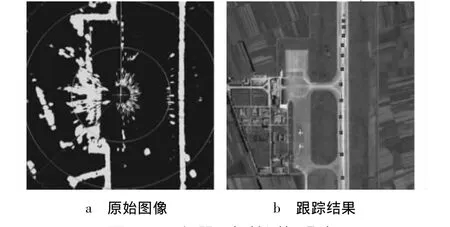
圖10 飛行器目標檢測與跟蹤
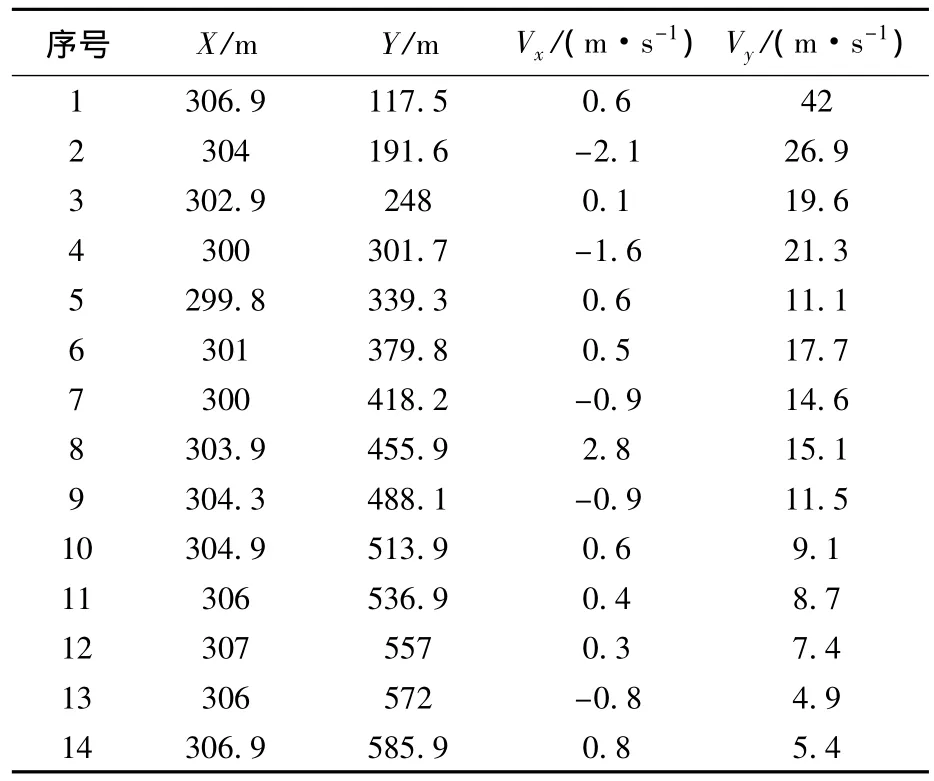
表1 飛行器目標狀態(tài)估計值
4 結(jié)束語
隨著低空空域的逐步開放,低空空域內(nèi)的飛行活動必將出現(xiàn)快速增長的態(tài)勢,飛行用戶和飛行活動的構(gòu)成日趨多樣化,采用新技術(shù)構(gòu)建用于支撐我國低空空域運行的服務(wù)保障體系,是提升低空空域飛行服務(wù)能力,實現(xiàn)我國低空空域管理改革目標的重要途徑.本文提出了一種基于雷達PPI圖像的低空目標檢測與跟蹤算法,用數(shù)據(jù)處理的方法實現(xiàn)了一次雷達的動目標檢測與跟蹤功能.傳統(tǒng)的閾值分割方法在降低漏警率的同時會犧牲虛警率,本算法中采用的雜波抑制方法利用目標和邊緣雜波的空域特性,能克服此矛盾,將二者同時保持在很低的水平;同時,采用IMM方法對目標的勻速、加速、減速、轉(zhuǎn)彎等機動運動進行跟蹤,實時獲取目標的位置和速度等狀態(tài)信息.
(References)
[1]呂茂輝,余秦勇,周琦,等.空管新技術(shù)在低空空域管理中的應用[J].通信技術(shù),2009,42(12):95-100
Lv Maohui,Yu Qinyong,Zhou Qi,et al.Applications of new ATM technology in low altitude space management[J].Communications Technology,2009,42(12):95-100(in Chinese)
[2]Anderson R.Technical data sheet of HARRIER security radars for airspace surveillance[EB/OL].Panama City,F(xiàn)lorida:[s.n.],2009[2010-09-30].http://www.detect-inc.com/downloads
[3]Nohara T J,Weber P,Jones G,et al.Affordable high-performance radar networks for homeland security applications[C]//IEEE Radar Conference.New York:IEEE Press,2008:1-6
[4]王春生.低空空域監(jiān)視系統(tǒng)研究[D].北京:北京航空航天大學自動化科學與電氣工程學院,2007
Wang Chunsheng.Research on Low-altitude airspace surveillance system[D].Beijing:School of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,2007(in Chinese)
[5]陳唯實,寧煥生,李敬,等.基于兩種掃描方式的雷達探鳥系統(tǒng)[J].北京航空航天大學學報,2009,35(3):380-383
Chen Weishi,Ning Huansheng,Li Jing,et al.Avian radar system based on two scanning modes[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(3):380-383(in Chinese)
[6]陳唯實,寧煥生,劉文明,等.基于雷達圖像的飛鳥目標檢測與信息提取[J].系統(tǒng)工程與電子技術(shù),2008,30(9):1624-1627
Chen Weishi,Ning Huansheng,Liu Wenming,et al.Flying bird targets detection and information extraction based on radar images[J].Systems Engineering and Electronics,2008,30(9):1624-1627(in Chinese)
[7]Bar-Shalom Y,Li X R,KirubarajanT.Estimationwith application to tracking and navigation:theory algorithms and software[M].New York:John Wiley & Sons,Inc,2001
[8]Li Z Z,Qi L,Li W Y,et al.Track initiation for dim small moving infrared target based on spatial-temporal hypothesis testing[J].J Infrared Milli Terahz Waves,2009,30(2):513-525
[9]Li X R,Jilkov V P.Survey of maneuvering target tracking,part V:multiple-modelmethods[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(4):1255-1321
Security surveillance of low-altitude airspace with primary radar
Chen WeishiNing Huansheng
(School of Electronics and Information Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
An affordable low-altitude airspace experimental radar surveillance system was introduced and the target detection and tracking scheme based on plane position indicator(PPI)radar images was proposed,where clutter suppression and target state estimation are two critical techniques.After background subtraction of PPI radar images,there are still much clutter distributed around the original background objects,so its spatial characteristic was utilized for clutter suppression,and then the interactive multiple models(IMM)method was adopted for tracking of target maneuvering motions with uniform speed,acceleration,deceleration and turning.The performance of the tracking algorithm was deeply investigated against simulated data.Results of the application of overall scheme to two sets of live PPI images were also provided showing the effectiveness of the proposed approach.
low-altitude airspace;radar;detection;track;interactive multiple models
TN 95
A
1001-5965(2012)02-0143-06
2010-09-30;< class="emphasis_bold">網(wǎng)絡(luò)出版時間:
時間:2012-02-21 11:46;
CNKI:11-2625/V.20120221.1146.001
www.cnki.net/kcms/detail/11.2625.V.20120221.1146.001.html
國家自然科學基金資助項目(61001134,61079019);第47批中國博士后科學基金資助項目;國家科技重大專項資助項目
陳唯實 (1982-),男,天津人,博士后,wishchen@buaa.edu.cn.
(編 輯:婁 嘉)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12