利用線陣列相機測量軌道平順度的研究
2012-06-20 00:52:48吳立群上海鐵路局科研所
上海鐵道增刊 2012年1期
吳立群 上海鐵路局科研所
我國高速鐵路的建設始于1999年所興建的秦沈客運專線。截至2010年12月底,中國國內運營時速200km以上的高速鐵路里程已經達到8358km,其中包括既有線提速近3000km。
至2012年,中國將建成42條高速鐵路客運專線,基本建成以"四縱四橫"為骨架的全國快速客運網,總里程13 000 km;到2020年中國時速在200 km以上的高速鐵路里程將會達到50 000 km。
1 高速鐵路軌道必須具有高平順度
適應列車高速度、高密度運行的線路,應具有高平順性、高穩定性、高精度、少殘變、少維修等特點。高速鐵路行車的基礎--軌道結構,其幾何參數對高速行車的安全性起著至關重要的作用。
輪軌相互作用的理論研究指出,軌道不平順所引起的輪軌動力響應及其行車安全性、平穩性和乘客舒適性的影響,均隨行車速度的提高而顯著增大。軌道不平順是引起輪軌作用力增大的主要原因。焊縫不平順,軌面剝離、擦傷、波形磨耗等原因,造成短波不平順幅值雖然很小,但是,在高速行車條件下,就可引起很大的輪軌作用力和沖擊振動。例如:一個0.2mm的迎輪臺階形微小焊縫不平順,當車速高達300km/h時,所引起的高頻振動作用力高達722kN,低頻輪軌力可達321kN,使道砟破碎、道床路基產生不均勻沉陷,從而形成較大的中長波不平順,并引起很大的噪聲,嚴重情況時還可能引發鋼軌、輪軌斷裂,導致惡性脫軌事故。為了保證乘客閱讀、餐飲、交談不受干擾,法、日、德等國規定,局部不平順引起的瞬時作用的垂直加速度半幅度不應大于0.12~0.15g,橫向不大于 0.1~0.12g。
理論分析和實踐都已證明,軌道不平順直接影響高速行車的安全與平穩,另一方面由軌道不平順引起的動荷載將進一步加速軌道的惡化和不平順的發展,特別是長鋼軌不平順對高速行車時的旅客舒適度影響較大。因此,在實際運營過程中必須對軌道進行維護,使其在較長的時間內保持良好的平順狀態,以保障高速行車的安全與平穩。
2 現有軌道平順度檢測裝置及本文測量裝置原理
目前國內外檢測軌道高低不平順的方法主要有兩種:弦測法和慣性法。
弦測法檢測原理如圖1所示,利用圖1中A、C兩輪與軌道接觸點的連線ac弦作為測量的"基準線",將B輪與軌道接觸點b偏離ac弦線的數值bl作為軌道不平順的測量值。弦測值bl通過測量A、B、C三輪的軸箱相對于車體主梁的位移按下式求得:
弦測法存在的問題是,作為測量的"基準線"的ac弦是隨軌道高低不平而起伏變化的,這就使得弦測法不能正確反映軌道的高低不平。所以應用弦測法,必須在系統中予以修正。

圖1 弦測法檢測原理
慣性基準法檢測原理如圖2所示,采用慣性元件陀螺儀建立基準線,本輪軸箱的上下運動H(即軌道的高低不平順)等于質量快M的上下運動Z及質量快與軸箱間相對位移W之和,即:

質量塊M對其慣性基準線的位移可用加速度傳感器測出質量塊M的加速度 經二次積分得到,質量塊M與軸箱間的相對位移可用位移傳感器測得。則式(2)可以表達為:

慣性法的主要缺點在于:測量系統龐大,測量機械結構復雜,設備的故障率高,安裝和維修都不方便,測量成本高昂,此外由于測量是以車輛為載體,測量步長大,不容易得到鋼軌的局部缺陷。

圖2 慣性基準法
本文提出了新的一種檢測原理,它即避免了弦測法"基準線"的不確定性,又避免了慣性法結構復雜的問題。檢測原理如圖3所示:
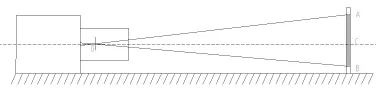
圖3 檢測原理圖
圖中左邊是一臺線陣列相機,線掃描方向自上而下,右邊是一塊面光源,AB區間為發光的范圍,兩臺設備都放在鋼軌上,當鋼軌絕對平順時,從相機可以讀出發光區間AB所對應的像素區間,同時我們可以得出此位置處的像素當量。然而,當光源處的軌道呈凹或凸狀時,AB區間呈下降或上升,相機像素區間也作相應的偏移,我們與理想像素區間比對出來的偏移量再乘上此處的像素當量,就可得出鋼軌垂直方向不平順的數值。
此外圖中虛線OC是虛擬的水平線,也相當于弦測法中的"基準線",只是弦測法中這條線是不確定的,而這里,只要在相機視野范圍里的任何一處,這條線都是唯一的,很好的解決了弦測法最大的不足。接著我們來確定這條虛擬水平線的像素點值。

圖4 檢測原理圖
將相機和光源放在一理想水平鋼軌上,由圖可知 ΔOCB″∽ΔB′BB″,因 B 點及B″點像素點值已知,則可求出C點像素點值,即水平線確立。同理,同樣利用三角形相似,可以得到任意處光源下邊緣的像素點值,實際值與此值的偏差就可得出鋼軌凹陷程度。
綜上所述,當相機擺放位置確定時,我們可以得出鋼軌任意離散點處軌道的凹凸相對于虛擬水平線的數值,即軌道的垂直方向平順度。這種方法簡單有效,設備使用壽命長。
3 關鍵程序代碼
以下程序代碼用C語言編寫,得到光源放在不同位置處,軌道的不平順程度。
//以下程序當光源放在最遠處時 (以相機焦點為0點)且鋼軌理想水平時使用

//以下為將設備放在被測鋼軌任意位置處,假設放在X處

4 結束語
綜上所述,我們可以得到0到10 m范圍內任意位置軌道高差,然而一點一點測量比較耗費人力物力,因此可以考慮做一輛小車,將光源固定在小車上面,要求小車推動時運行平穩,這樣我們可以將10 m范圍連續的測量,之后通過描點畫圖的方法描述出這10 m范圍內鋼軌的真實曲線,便于分析軌道的長波。
另外,因為小車有一定的寬度,小于這寬度范圍內的短波,會被此系統濾去,故在保證小車運行平穩的前提下,長度做的越小越好。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
