永磁同步電動機伺服系統(tǒng)電流環(huán)優(yōu)化設計
2012-06-19 09:10:22韓海云秦海鴻朱德明
微特電機 2012年6期
劉 軍,敖 然,韓海云,秦海鴻,朱德明
(1.上海電機學院,上海200240;2.南京航空航天大學,江蘇南京210016)
0 引 言
永磁同步電動機由電勵磁同步電動機發(fā)展而來,以加裝高性能永磁體的轉子代替繞線式轉子,降低了勵磁損耗,提高了效率和功率密度,結構簡單,控制方便,堅固可靠,因而永磁同步電動機伺服系統(tǒng)已成為國內(nèi)外伺服領域的研發(fā)熱點,得到了廣泛的應用。近年來,微機技術高速發(fā)展,電力電子技術不斷取得突破,高性能稀土永磁材料的出現(xiàn),以及現(xiàn)代控制理論的發(fā)展,使得永磁同步電動機伺服系統(tǒng)的優(yōu)勢不斷得到強化,因而,對其控制方法進行研究和優(yōu)化,對于進一步提高系統(tǒng)性能至關重要。
1972年出現(xiàn)的交流電機矢量控制理論,解決了定子電流的解耦問題,將對電機的矢量控制轉變?yōu)閷Χㄗ与娏鞯目刂啤R虼耍欧到y(tǒng)的控制性能,在很大程度上取決于定子電流能否實現(xiàn)對矢量控制指令的快速響應和準確跟蹤,而當電流環(huán)性能不能滿足要求時則會直接影響矢量控制策略的實現(xiàn),更甚者將導致系統(tǒng)超調失步。電流環(huán)性能受以下幾個因素影響,電流調節(jié)器參數(shù)設計,逆變器的傳遞特性,電機反電勢以及電機工作時的參數(shù)變化等。
本文針對實際的試驗系統(tǒng),根據(jù)工程設計方法,對永磁同步電動機電流環(huán)進行研究設計,對影響電流環(huán)性能的因素進行了分析,采取相應的技術手段實現(xiàn)了誤差補償,并進行了實驗驗證。
1 永磁同步電動機伺服系統(tǒng)的工作原理及整體結構
1.1 永磁同步電動機伺服控制原理
矢量控制的基本思想是通過坐標變換,將定子三相電流變換為基于轉子坐標的直軸電流id和交軸電流iq,并對id和iq進行單獨控制,實現(xiàn)轉矩和氣隙磁通的獨立控制。坐標變換如下:

式中:ia、ib、ic分別為電機定子三相電流;θ為d軸軸線和A相繞組軸線間的夾角。
矢量控制有多種方式。控制定子繞組中的三相電流,使其產(chǎn)生的正弦波磁動勢和永磁體的基波磁動勢正交,改變定子電流幅值,以實現(xiàn)對電磁轉矩的控制,這就是id=0控制方式,又稱轉子磁場定向控制。此時電機電樞電流只有交軸分量,直軸分量為零,可以獲得最高的轉矩電流比。根據(jù)實時檢測的位置信號來控制定子各相繞組的電流,即可以保持定子合成磁勢和轉子磁勢正交。
對隱極式的永磁同步電動機,為簡化電機模型,做以下假設:①忽略鐵心飽和,②不計渦流和磁滯損耗,③不計永磁材料的電導率,并認為定子繞組中的感應電動勢是正弦的。經(jīng)過矢量變換后,其d、q坐標系下的電機數(shù)學模型如下:
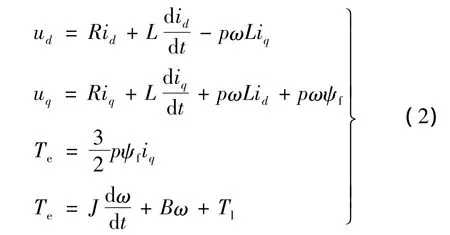
式中:ud、uq為 d、q軸定子電壓分量;R、L為定子相電阻和相電感;id、iq分別為直軸和交軸定子電流分量;p為轉子極對數(shù);ω為轉速;Te、Tl分別為電磁轉矩和負載轉矩;ψf為轉子磁鏈。
1.2 永磁同步電動機伺服系統(tǒng)的結構
本試驗系統(tǒng)由三個功能模塊組成,包括伺服電機、主電路、控制電路。電機參數(shù)如表1所示。主電路采用AC-DC-AC結構,整流電路為三相不控整流,逆變電路功率器件采用三菱公司的IPM(智能功率模塊)7MBP50RA060。該模塊有較高的集成度,內(nèi)部包含7個IGBT單元,其中6個IGBT單元構成三相逆變器,控制信號可以經(jīng)光耦隔離后直接輸入到IPM的驅動引腳,不需要額外的驅動電路。第7個IGBT單元組成泄放回路,若直流側電壓超過安全設定,則由控制電路產(chǎn)生保護信號,驅動該單元導通,釋放過多電能。
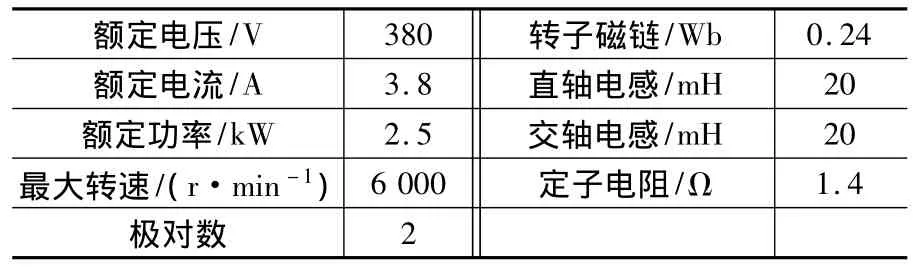
表1 永磁同步電動機參數(shù)表
為獲得良好的動靜態(tài)性能,采用模擬電流環(huán)加數(shù)字速度環(huán)的方式實現(xiàn)系統(tǒng)的雙環(huán)控制。主控制器采用TI公司的數(shù)字信號處理器TMS320F2407。由其產(chǎn)生電流給定信號,再經(jīng)DA轉換與電流反饋比較,對其差值進行PI調節(jié)后與三角波比較得到控制信號。硬件結構如圖1所示。
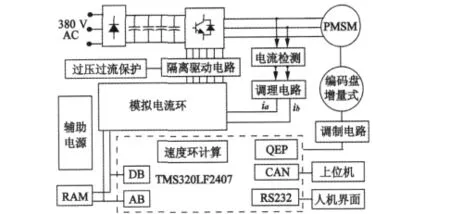
圖1 伺服系統(tǒng)結構圖
2 伺服系統(tǒng)電流環(huán)的設計和研究
2.1 永磁同步電動機伺服系統(tǒng)電流環(huán)的設計
電機的反電勢會使電流輸出與給定存在偏差。但低速時反電勢較小,可通過調節(jié)器的控制消除,因此設計時可忽略不計[2]。電流環(huán)傳函結構圖如圖2所示,其中,Kv是逆變器電壓放大倍數(shù),表示逆變器直流側電壓與三角載波電壓幅值之比,τv是逆變器時間常數(shù),與開關頻率有關,Rs是電樞繞組電阻,Lq是交軸電感,β是反饋系數(shù),Toi是反饋濾波時間常數(shù),GACR是電流調節(jié)器傳遞函數(shù)。

圖2 電流環(huán)結構圖
未加校正時的電流環(huán)開環(huán)傳函如下:

式中:τv、Toi是小時間常數(shù),因此可將控制對象等效:

電流調節(jié)器可選用PI調節(jié)器進行設計:

用PI調節(jié)器的零點來抵消控制對象的大時間常數(shù)極點,如下:

得到電流環(huán)的開環(huán)傳遞函數(shù):

系統(tǒng)要求電流環(huán)具有較快的響應速度,同時超調又不可過大,因此令:

設定逆變器開關頻率為f=18 kHz,于是逆變器時間常數(shù),將0.6、Toi=0.11 ms和表1的電機參數(shù)代入到式(6)、式(8)中,得 Kp=6.5,Ki=0.002 2。
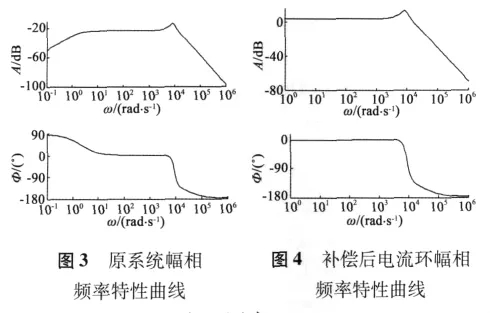
加入PI調節(jié)器之前的系統(tǒng)開環(huán)幅相頻率特性曲線如圖3所示,系統(tǒng)明顯不穩(wěn)定;加入PI調節(jié)器后得到的系統(tǒng)開環(huán)的幅相頻率特性曲線如圖4所示,可見所設計的電流環(huán)是穩(wěn)定的,且有45°左右的相角裕度。
2.2 影響電流環(huán)的主要因素
諸多因素會影響到電流環(huán)性能,其中影響最為顯著的包括電流調節(jié)器參數(shù)、反電勢和電流調節(jié)器零點漂移等。電流調節(jié)器比例系數(shù)和積分系數(shù)決定了電流環(huán)的動態(tài)和穩(wěn)態(tài)精度,增大比例系數(shù)可以提高動態(tài)響應,但同時會增大超調;而積分系數(shù)則決定了電流環(huán)的穩(wěn)態(tài)精度,但積分系數(shù)取得過大則容易引起振蕩,影響了系統(tǒng)的穩(wěn)定性。因此需反復試驗比較,在保證系統(tǒng)穩(wěn)定的前提下,尋求最佳參數(shù)。
對于永磁同步電動機,電壓平衡方程如下:

式中:ua、ea分別是電機電樞端口電壓和反電勢,ea與轉速成正比,低速時較小,其影響可通過電流調節(jié)器的控制基本消除,總的控制特性較好。而高速時,ea變得比較大,造成電樞繞組上的凈電壓減少,進而導致電流變化率降低,實際電流和給定電流之間的跟隨誤差將嚴重影響矢量控制策略的實現(xiàn),此時反電勢不可忽略,必須對其抑制和補償。由于高比例系數(shù)會同時使諧波電流得到放大從而降低輸出電流的性能,而減小積分系數(shù)也會增大電流穩(wěn)態(tài)誤差,因此,不能簡單地通過增大電流調節(jié)器的比例系數(shù)和減小其積分系數(shù)來實現(xiàn)對反電動勢的抑制,必須采取其他解決方法。
Ka為逆變器控制增益,表示逆變器輸出電壓和調節(jié)器輸出信號幅值之比:

設逆變器直流側電壓為Udc,三角載波幅值為Us,則逆變器控制增益和調制比m的關系如下:

將式(10)代入式(11)中,得:

取輔助參數(shù)h,令h滿足:

由Uo=Udch,h為直流電壓利用率,保持Udc為恒值,Uo與h成線性關系,h和調制比m的關系曲線如圖5所示。可見,調制比m<1,逆變器通常工作在線性狀態(tài)下,傳輸特性較好,直流電壓利用率較低。當電機高速時,反電勢增大,從而減少了加在電樞上的凈電壓,這時僅僅通過調節(jié)逆變器輸出電壓已經(jīng)無法實現(xiàn)補償,導致實際電流發(fā)生畸變,無法實現(xiàn)對給定電流的準確快速跟蹤。此時可采取m>1即過調制的方法,由圖5可見,當m>1時,直流側電壓利用率較高,可以提高逆變器輸出電壓,減小反電勢的干擾。
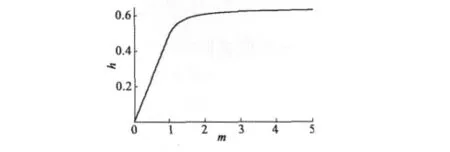
圖5 逆變器輸出電壓隨調制比變化曲線
但是,增大調制比同時會影響逆變器的控制增益,因此要對其取值進行反復試驗比較,尋求最佳參數(shù)。
取輔助參數(shù)k,令k滿足:


圖6 逆變器控制增益隨調制比變化曲線
3 實驗驗證
根據(jù)上述參數(shù)設計,設置調制比m=1,此時實驗波形如圖7所示。圖7(a)是f=10 Hz時實際與給定電流的波形,圖7(b)是f=100 Hz時實際與給定電流的波形。經(jīng)對比可見,低速時電流跟隨能力較好,而高速時(f=100 Hz),實際電流的畸變較大。
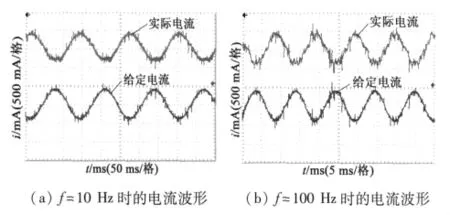
圖7 m=1時實際電流和給定電流波形
保持其他條件不變,設置調制比m=1.2,此時實驗波形如圖8所示。圖8(a)是f=10 Hz的波形,圖8(b)是f=100 Hz時的波形。與圖7比較可以看到,實際電流在高速時仍然保持較好的跟隨能力,反電動勢的影響得到了抑制。
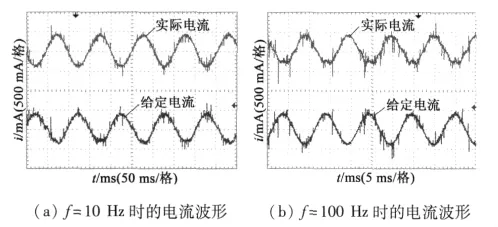
圖8 m=1.2時實際電流和給定電流波形
4 結 語
永磁同步電動機的矢量控制,要求定子電流對控制指令的準確快速跟蹤,從而對電流環(huán)的性能提出了較高的要求。本文按照工程設計方法,對矢量控制永磁同步電動機電流調節(jié)器進行了詳細設計,所實現(xiàn)的伺服系統(tǒng)能保證電機電樞電流有較好的輸出和跟蹤特性,同時保證了整個系統(tǒng)的穩(wěn)定性。分析了影響電樞電流跟蹤能力的主要因素,指出電機反電勢在高速時是最主要的影響因素,并分析了對反電勢的抑制方法,指出在高速時采用過調制可以提高逆變器的直流電壓利用率,從而抑制反電勢,實現(xiàn)對電流環(huán)的動態(tài)性能的優(yōu)化。實驗結果證明了該方法的有效性。
[1]敖然,肖嵐,朱德明,等.永磁同步電機伺服系統(tǒng)電流環(huán)的研究[J].電力電子技術,2008,42(1):57 -59.
[2]敖然.基于DSP控制的永磁同步電機伺服系統(tǒng)性能的研究[D].南京:南京航空天天大學,2008.
[3]陳伯時.電力拖動自動控制系統(tǒng)(第4版)[M].北京:機械工業(yè)出版社,2010.
[4]熊小娟,韓亞榮,邱鑫.永磁同步電機伺服系統(tǒng)電流環(huán)設計及性能分析[J].科技傳播,2010,5(上):62-63.
[5]朱廣斌,孟小利,嚴仰光.基于DSP永磁同步伺服系統(tǒng)速度環(huán)的研究[J].伺服控制,2007(7):40-43.
[6]朱廣斌,孟小利,嚴仰光.基于DSP的永磁同步電動機伺服系統(tǒng)速度環(huán)研究[J].微電機,2008,41(2):53-55.
[7]陳榮.永磁同步電機伺服系統(tǒng)電流環(huán)的仿真[J].電機與控制應用,2008,35(9):20.
[8]張彥如,胡育文,黃文新,等.伺服系統(tǒng)矢量控制電流環(huán)分析和設計[J].微電機,2008,41(11):30-33.
[9]陳榮.永磁同步電機伺服系統(tǒng)研究[D].南京:南京航空航天大學,2004.
[10]孫祖勇.基于DSP的全數(shù)字交流永磁伺服系統(tǒng)的研究[D].南京:南京航空航天大學,2008.