光學(xué)穩(wěn)像系統(tǒng)顫振抑制性能的分析與設(shè)計
2012-06-11 01:53:10林喆何海燕何林康建兵
航天返回與遙感 2012年4期
林喆 何海燕 何林 康建兵
(北京空間機(jī)電研究所,北京 100076)
1 引言
對于高分辨率對地觀測光學(xué)遙感系統(tǒng),為了獲取更高的地面空間分辨率,光學(xué)系統(tǒng)口徑與焦距不斷加大,這不但增加了制造、裝配和發(fā)射的難度與成本,同時不可避免的有損于光機(jī)系統(tǒng)剛度,這樣在空間微重力環(huán)境與各類星上運動執(zhí)行機(jī)構(gòu)(動量輪、太陽翼和天線指向機(jī)構(gòu)等)的擾動作用下,會造成成像光軸與感光器件間發(fā)生頻帶較寬的顫振,降低了光學(xué)系統(tǒng)成像傳遞函數(shù),使得獲取的圖像存在運動模糊和畸變,嚴(yán)重影響了圖像空間分辨率水平。光學(xué)穩(wěn)像技術(shù)是一種用于實時補償光路顫振對成像影響的有效方法[1-2],在NASA的TRACE相機(jī)和Solar-B空間望遠(yuǎn)鏡上均獲得良好的應(yīng)用效果[3],已成為提升空間相機(jī)分辨率水平的核心技術(shù)之一。
本文針對光學(xué)穩(wěn)像系統(tǒng),分析了系統(tǒng)對入射光束顫振的抑制性能,以及顫振抑制性能與像移校正機(jī)構(gòu)動態(tài)特性和像移測量時延間的約束關(guān)系。在此基礎(chǔ)上,進(jìn)一步給出了基于出射光路顫振最小方差的控制器設(shè)計原則,完成了系統(tǒng)的優(yōu)化設(shè)計,并通過試驗驗證了文中結(jié)論的有效性。
2 光學(xué)穩(wěn)像系統(tǒng)的控制回路模型
典型的光學(xué)穩(wěn)像系統(tǒng)回路主要由像移探測傳感器、像移校正組件和像移補償控制器3部分組成[2],如圖1所示。
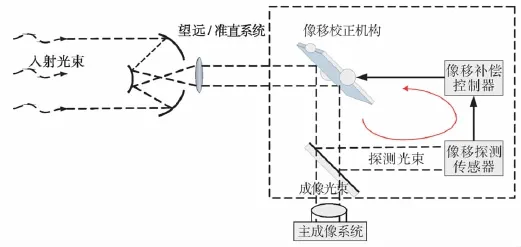
圖1 光學(xué)穩(wěn)像系統(tǒng)原理框圖Fig.1 Sketch map of optical image stabilization components
像移探測傳感器用于實時測量光路中的運動分量[4]。為了有效校正成像光束在主成像積分時間內(nèi)的運動,像移探測傳感器對像移運動的探測周期應(yīng)遠(yuǎn)小于主成像積分時間,其對像移的測量精度應(yīng)高于像移補償精度要求。像移校正機(jī)構(gòu)是對光路顫振進(jìn)行補償?shù)膱?zhí)行部件,其作用于入射光束和成像光束之間,通過快速調(diào)整光束方向使成像光束保持相對穩(wěn)定[5]。像移補償控制器是光學(xué)穩(wěn)像系統(tǒng)的核心環(huán)節(jié),它是像移探測傳感器與像移校正機(jī)構(gòu)的聯(lián)通環(huán)節(jié)。根據(jù)反饋控制理論,光學(xué)穩(wěn)像系統(tǒng)將像移探測傳感器作為閉環(huán)反饋控制系統(tǒng)的反饋測量器件,將像移校正機(jī)構(gòu)作為控制輸出的執(zhí)行機(jī)構(gòu),通過像移補償控制器構(gòu)成控制回路來有效抑制光路顫振所帶來的影響[6-7]。圖2為光學(xué)穩(wěn)像系統(tǒng)的信號回路示意圖。

圖2 典型光學(xué)穩(wěn)像系統(tǒng)回路框圖Fig.2 Block diagram of a general optical image stabilization system loop
對于成像光路顫振信號θm(t),像移探測傳感器的測量結(jié)果可表示為:

式中 s為拉普拉斯算子;Kd和d分別為像移探測傳感器對像移變化的測量增益與檢測延時;n(t)為測量噪聲。
像移校正機(jī)構(gòu)是光學(xué)穩(wěn)像系統(tǒng)的執(zhí)行部件,為了快速有效地校正光路顫振,通常應(yīng)用行程范圍小但響應(yīng)速度快的壓電陶瓷電機(jī)(PZT)作為驅(qū)動載體,其驅(qū)動特性與RC濾波電路相近[3],其傳遞函數(shù)可描述為:

式中 V(s)為PZT驅(qū)動信號;Kp為驅(qū)動增益;Tp為PZT主導(dǎo)極點所對應(yīng)的時間常數(shù)。
考慮入射光束顫振信號為d(t),像移補償控制器的傳遞函數(shù)為G(s),則光學(xué)穩(wěn)像系統(tǒng)的控制回路模型可用圖3表示。
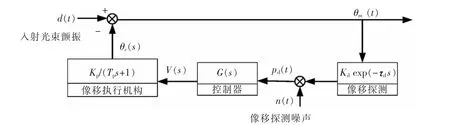
圖3 光學(xué)穩(wěn)像系統(tǒng)控制回路模型Fig.3 Closed loop model of optical image stabilization
3 顫振抑制能力分析
由圖3可知,光學(xué)穩(wěn)像系統(tǒng)通過反饋回路來衰減入射光束顫振到主成像光束的傳遞過程,其傳遞函數(shù)可描述為


進(jìn)而可得到系統(tǒng)顫振抑制函數(shù)的表達(dá)式為:

考慮到低頻段 Gb(s ) <<1,則 f(ω)≈1/Gb(jω) ,由此可知,通過提高光路顫振頻段內(nèi)的反饋回路增益即可有效提升系統(tǒng)對光學(xué)顫振的抑制能力。同理,對于低頻段,從光學(xué)穩(wěn)像系統(tǒng)對顫振的隔離性能要求即可換算對反饋回路的增益要求,如圖4所示。
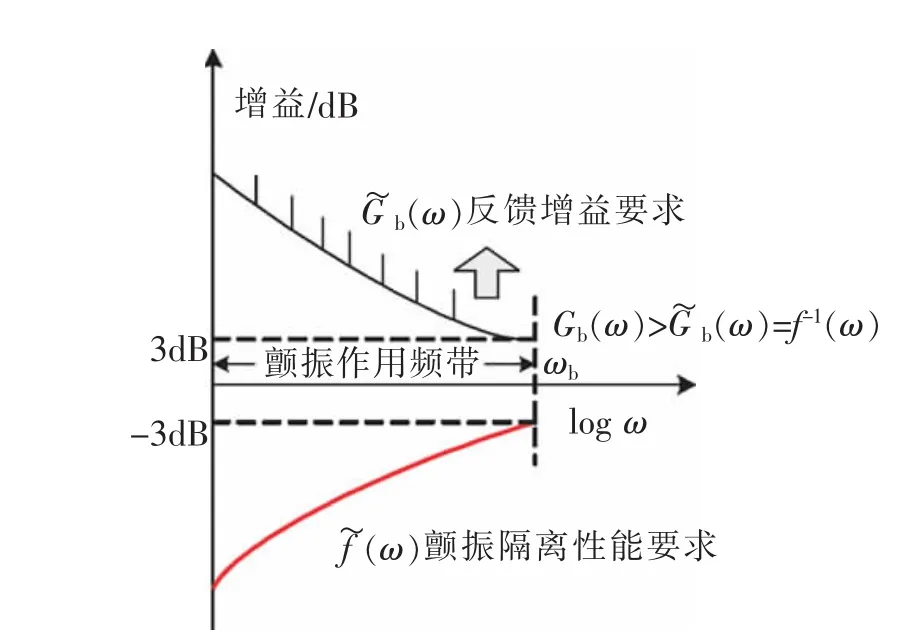
圖4 顫振隔離性能與反饋增益要求間的關(guān)系Fig.4 Relationship of jitter rejection performance and feedback gain demand
根據(jù)上述分析,隨著頻率的增加光學(xué)穩(wěn)像系統(tǒng)對光路顫振的衰減能力隨之減弱,可將衰減比率為0.707(-3dB)所對應(yīng)的頻率ωb定義為顫振抑制帶寬[8-9]。光學(xué)穩(wěn)像系統(tǒng)僅對頻率低于ωb的顫振分量具有良好的抑制作用,當(dāng)顫振頻率過高時,系統(tǒng)不但無法有效抑制顫振,還可能放大顫振的影響,因此在進(jìn)行光學(xué)穩(wěn)像系統(tǒng)設(shè)計時,應(yīng)保證ωb覆蓋光路顫振的主要作用頻帶[10-11]。
由(4)可知,為了獲取更好的光路顫振抑制性能,應(yīng)提高反饋回路的傳遞增益與帶寬,但需同時考慮回路穩(wěn)定性約束。考慮控制器應(yīng)用積分控制規(guī)律,反饋通道傳遞函數(shù)為:

式中γ為積分控制增益。如圖5所示,G(jω)Nyquist曲線與實軸的交點所對應(yīng)的頻率ωc,應(yīng)滿足

根據(jù)Nyquist穩(wěn)定性判據(jù),可得到對增益提出約束為

為保證系統(tǒng)具有6dB的幅值穩(wěn)定裕度,通常取γ= 0 .5γmax。
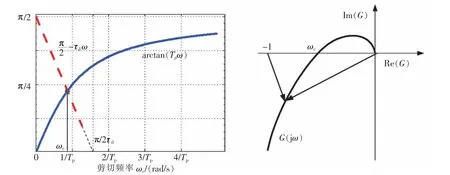
圖5 反饋通路的剪切頻率ωcFig.5 Depiction of cut-off frequency for feedback loop
公式(6)和(7)描述了反饋增益上限與執(zhí)行機(jī)構(gòu)響應(yīng)速度和探測探測時延特性間的約束關(guān)系。如圖6所示,隨著Tp與d的增加,系統(tǒng)在回路穩(wěn)定性的約束下,反饋增益的提升能力減弱,對入射光束顫振的抑制能力隨之減弱,且增益衰減的速率對像移探測時間更為敏感。
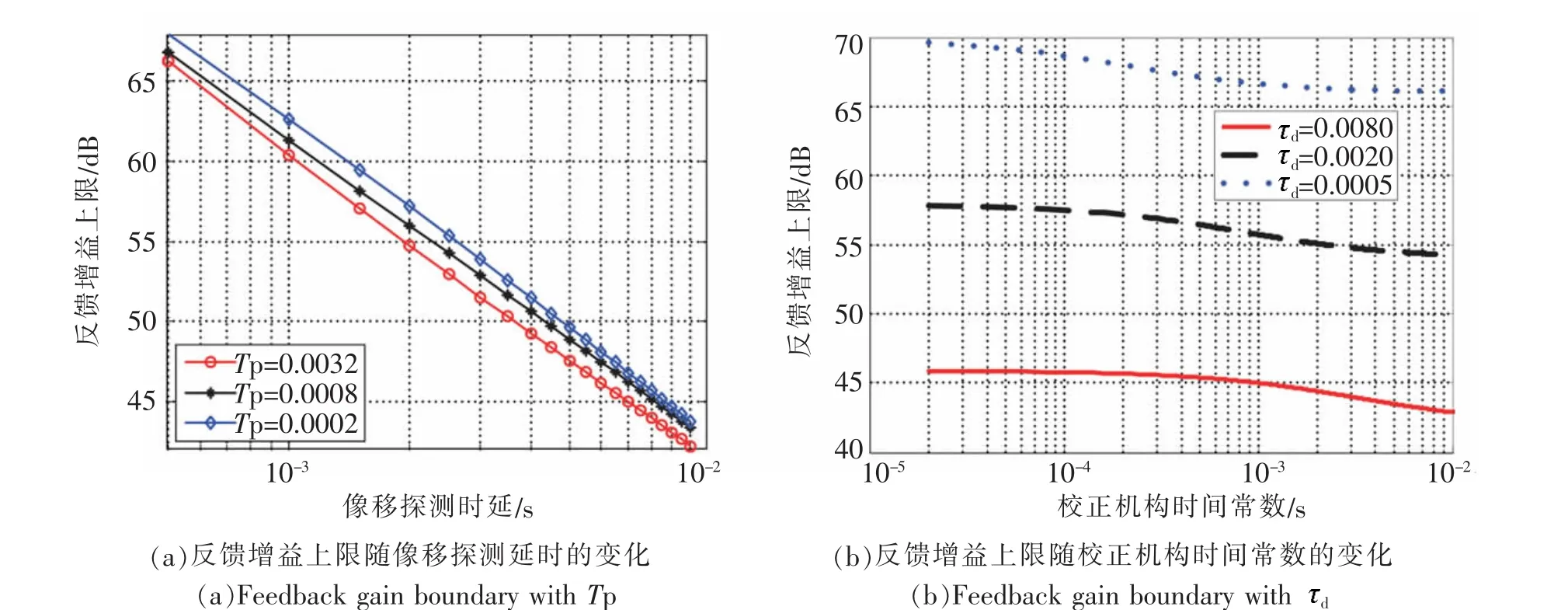
圖6 反饋增益上限隨Tp與 d的變化關(guān)系Fig.6 Feedback gain boundary with Tpand d
4 穩(wěn)像控制器的最小方差控制
上述分析可知,在穩(wěn)定性的約束下增加回路增益可提升光學(xué)穩(wěn)像系統(tǒng)對入射光束顫振的抑制能力,然而輸出光束同時會受到像移探測噪聲的影響。根據(jù)式(5),考慮像移探測噪聲n(t)可得:

式中 N(s)為噪聲信號n(t)的拉普拉斯變換式。增加γ一方面提升了系統(tǒng)對入射光束的抑制能力,但同時亦放大了像移測量噪聲所引發(fā)的光路顫振,如圖7所示。因此,針對入射顫振和探測噪聲的譜密度特性,存在最優(yōu)的γ,使出射光路的抖動幅度達(dá)到最小。
考慮入射光束顫振與像移探測噪聲的譜密度分布分別為Φd(ω)和Φn(ω),且兩者不具相關(guān)性,則出射光束抖動的方差可表示為

求解該積分,并根據(jù) dε2/dγ= 0 ,可得出射光束抖動最小的γ。
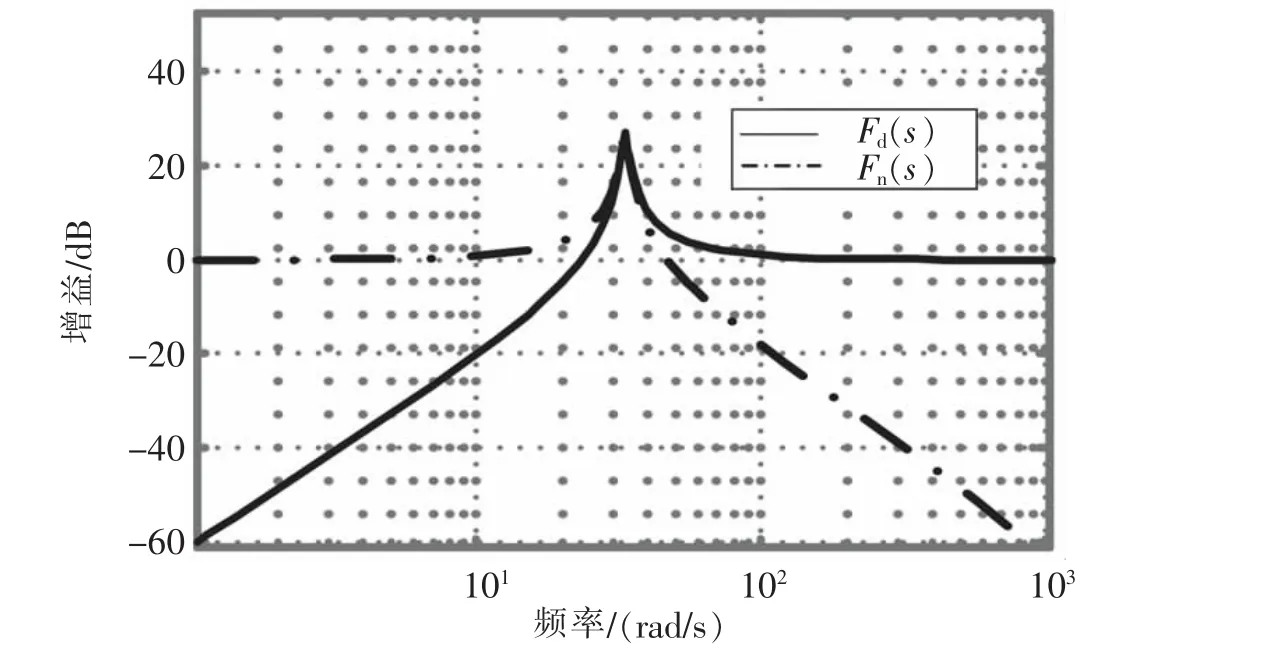
圖7 對入射顫振與像移探測噪聲的傳遞函數(shù)Bode圖Fig.7 Bode diagram of input jitter transfer function and pixel-shift measurement noise transfer function
5 試驗驗證
某空間光學(xué)穩(wěn)像系統(tǒng)試驗平臺如圖8所示。像移補償機(jī)構(gòu)通過PI公司的S-330二維偏轉(zhuǎn)鏡實現(xiàn),應(yīng)用Mikrotron公司MC1360高速相機(jī)結(jié)合投影相關(guān)算法實現(xiàn)2 000Hz高速像移探測。
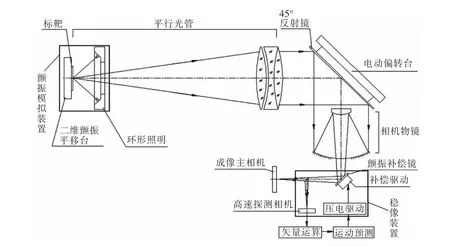
圖8 空間光學(xué)穩(wěn)像系統(tǒng)試驗平臺Fig.8 Experiment system of space optical image stabilization
經(jīng)校準(zhǔn),像移測量噪聲的譜密度可描述為方差為σn2=(0.015像素)2,測量延時為0.000 5s。應(yīng)用振動臺加載指數(shù)相關(guān)隨機(jī)振動來模擬入射光束顫振,其加載譜密度為

如圖9所示。

圖9 入射光束顫振與像移探測噪聲信號Fig.9 Input jitter signal and measurement noise of pixel-shift sensor
根據(jù)公式(7)計算可得積分增益上限為2 257.3。圖10給出了增益分別為2 500和2 000時的穩(wěn)像效果,可以看出,當(dāng)增益超出公式(7)所給出的增益上限時,出射光束發(fā)生發(fā)散。此外,當(dāng)增益為1 650時,出射光束的抖動方差達(dá)到最小值,系統(tǒng)對入射光束顫振與像移探測噪聲衰減的綜合效果最優(yōu),如圖11所示。

圖10 穩(wěn)像系統(tǒng)的輸入輸出曲線Fig.10 Output jitter curves of image stabilization system with feedback gains
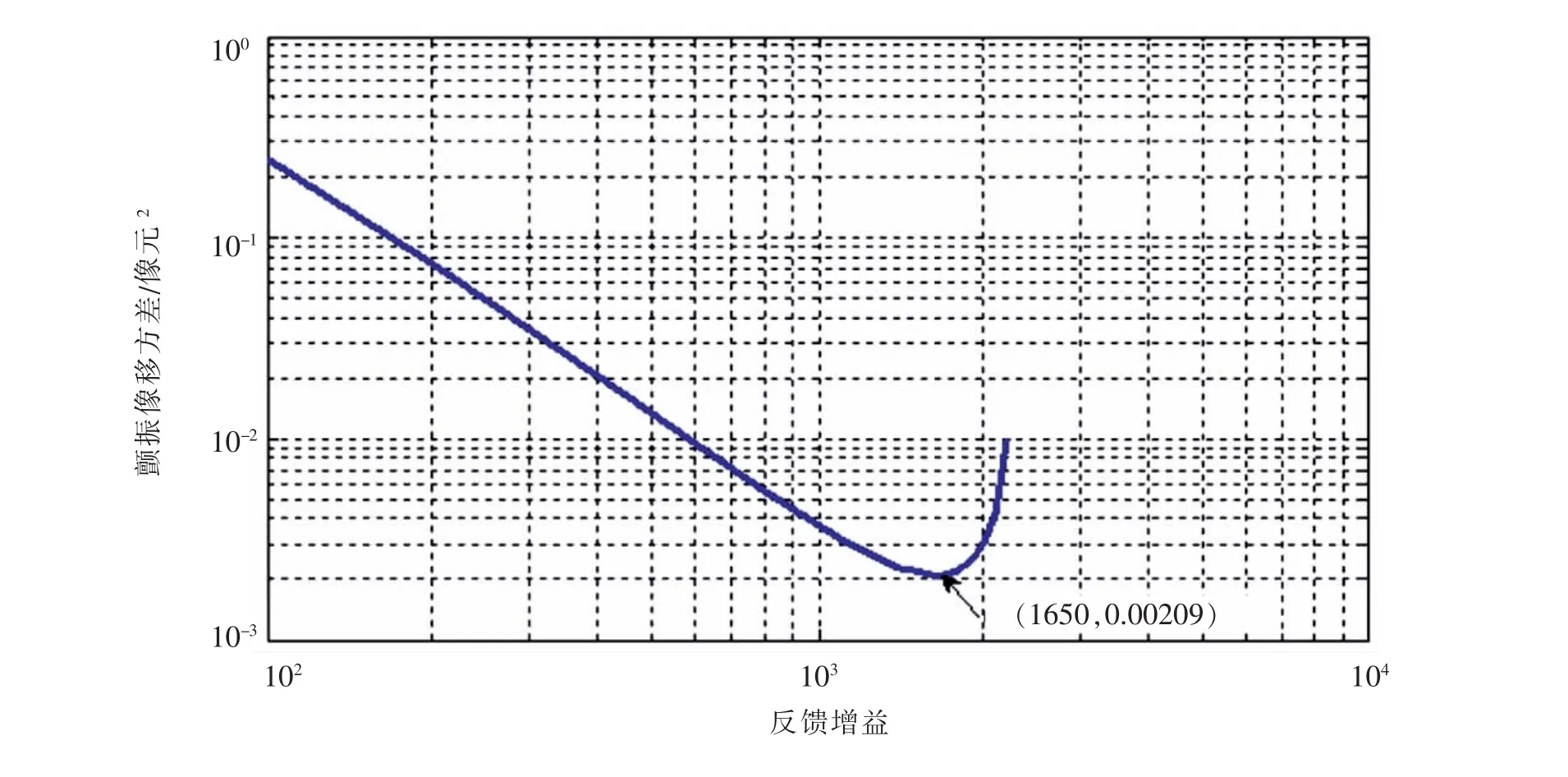
圖11 出射光束抖動方差隨增益的變化曲線Fig.11 Curve of pixel-shift residual variance with feedback gains
此時,穩(wěn)像系統(tǒng)可將公式(10)所對應(yīng)的入射光束顫振將抑制到0.2像元以下,開啟穩(wěn)像前后的效果如圖12所示。

圖12 穩(wěn)像系統(tǒng)對光束顫振的抑制效果Fig.12 Jitter rejection result of optical image stabilization system
向穩(wěn)像系統(tǒng)加載掃頻信號。如圖13所示,當(dāng)入射顫振高于90Hz以上時,輸入顫振超出了穩(wěn)像系統(tǒng)的顫振抑制帶寬,系統(tǒng)對顫振的抑制效果消失。
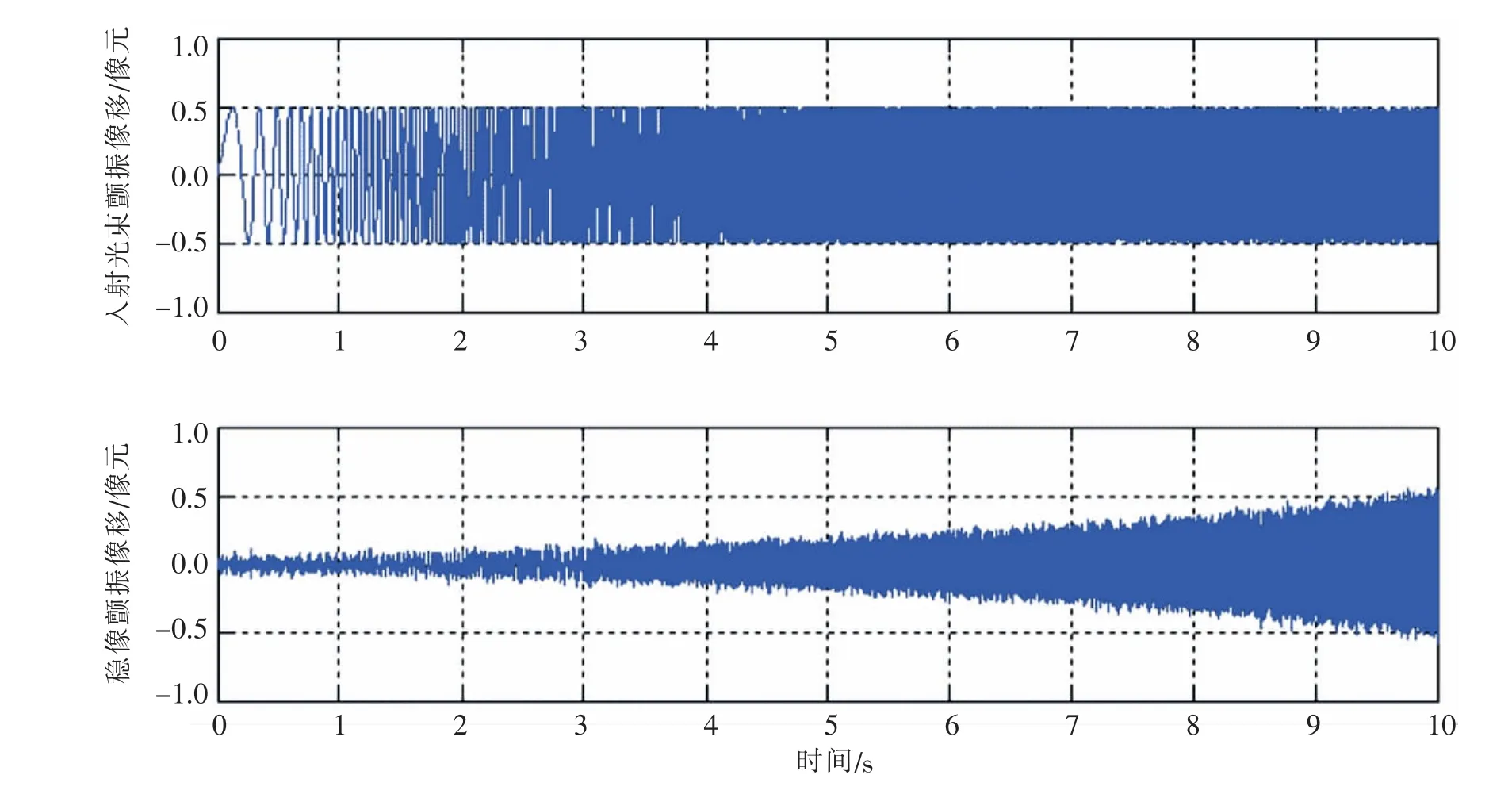
圖13 穩(wěn)像系統(tǒng)的掃頻輸出結(jié)果Fig.13 Result of optical image stabilization system with input jitter of different frequencies
6 結(jié)束語
光學(xué)穩(wěn)像系統(tǒng)對顫振的隔離性能取決于反饋回路的增益,本文首先建立了系統(tǒng)回路的數(shù)學(xué)模型,分析了反饋回路增益的穩(wěn)定性約束條件,進(jìn)而為像移探測與像移校正部件的選取與設(shè)計提供依據(jù)。并在此基礎(chǔ)上,文中給出了以出射光束抖動最小方差為目標(biāo)的增益優(yōu)化原則,并通過試驗驗證了文中結(jié)論的有效性。
(References)
[1]周慶才,王志堅.光學(xué)穩(wěn)像技術(shù)在空間通訊及航空、航天相機(jī)中應(yīng)用探討[J].空間科學(xué)學(xué)報,2004,24(1):74-80.ZHOU Qingcai,WANG Zhijian.The Discuss of Application about the Technology of Optical Image-stabilization in Space Communication or in Aerial and Aerospace Cameral[J].Chinese Journal of Space Science,2004,24(1):74-80.(in Chinese)
[2]Scott W T,Sergio R.Introduction To Image Stabilization[J].Tutorial Text in Optical Engineering SPIE 2006,TT73:1-8.
[3]Toshifumi Shimizu.Image Stabilization System on SOLAR-B Optical Telescope[J].Proceedings of SPIE,2004,5487:1199-1206.
[4]葛鵬,李奇,馮華君,等.基于光學(xué)聯(lián)合變換相關(guān)器的像移探測技術(shù)[J].光子學(xué)報,2009,38(10):2694-2697.GE Peng,LI Qi,F(xiàn)ENG Huajun,et al.Image Motion Detection Based on Optical Joint Transform Correlator[J].Acta Photonica Sinica,2009,38(10):2694-2697.(in Chinese)
[5]Baker J T,Dymale R,Carreras R A,et al.Design and Implementation of a Low-cost Starlight Optical Tracker System with 500Hz Active Tip-tilt Control[J].Computers and Electrical Engineering,1996,24:123-133.
[6]Janscheka K.Compensation of Focal Plane Image Motion Perturbations with Optical Correlator in Feedback Loop,in Sensors,Systems,and Next-generation Satellites VIII[J].Proceedings of SPIE,2004,5570:280-288.
[7]Venema T M.Closed-loop Adaptive Optics Control in Strong Atmospheric Turbulence[D].Lieutenant Colonel,USAF.2008:19-26
[8]Gaffard J P,Boyer C.Adaptive Optics:Effect of Sampling Rate and Time Lags on the Closed Loop Bandwith[J].Adaptive Optics and Optical Structures,SPIE,1990,1271:33-50.
[9]Euerbroek B L,Vanloan C,Pitsians N P,et al.Optimizing Closed-loop Adaptive Optics Performance Using Multiple Control Bandwidth[J].J.opt Soc Am A.1994,11:444-451.
[10]Paschall R N,Anderson D J.Linear Quadratic Gaussian Control of a Deformable Mirror Adaptive Optics System with Time Delayed Measurements[J].Applied Optics,1994,32:6347-6358.
[11]Fedrigo E,Muradore R,Zilio D.High Performance Adaptive Optics System with Tip/tilt Control[J].Control Engineering Practice,2009,17:122-135.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45