高分辨距離像相關性輔助多目標跟蹤
2012-06-08 08:40:30張銀河陳錄華張洪濤王作云
雷達與對抗 2012年3期
關鍵詞:特征
李 斌,張銀河,陳錄華,張洪濤,王作云
(96669 部隊,北京 100085)
0 引言
在導彈攻防對抗中,彈道導彈中段突防手段通常采用誘餌和碎片,它們與真彈頭在空間形成威脅目標群,在大氣層外作慣性飛行。多功能相控陣雷達對威脅目標群捕獲后的跟蹤是典型的多目標跟蹤問題。通過搜索和初始跟蹤建立目標軌跡后,多功能相控陣雷達通過對多個目標的散射重心的跟蹤,獲得目標的位置、速度等目標運動學狀態信息。同時,為了對目標分類和識別,需要對重點觀測目標采用寬帶信號進行跟蹤,執行高分辨觀測工作模式,可獲得目標的高分辨距離像(High Resolution Range Profile,HRRP)等特征。雷達測量的目標運動學狀態信息反映了目標在空間坐標的位置及其變化。HRRP 特征不僅提供了目標結構特征信息,而且相鄰時刻的HRRP的統計距離反映了它們在特征空間的距離。
目標的運動學狀態信息和目標的HRRP 特征從不同空間反映出當前目標的狀態。融合目標特征信息用于多目標跟蹤,應能提高多目標跟蹤的性能和精度,而跟蹤性能的提高又是獲得更加穩健的目標特征和進行目標分類和識別的基礎,如雷達必須依靠穩定的跟蹤和積累才能獲得可靠的特征,如ISAR 等,融合兩方面信息可以達到互補的效果。文獻[1-8]研究了多種分類信息輔助跟蹤的方法。由于在大多數情況下預知非合作目標的類型和先驗特征的條件較難滿足,分類信息輔助跟蹤的應用受到一定限制。本文根據目標HRRP 在相鄰觀測期間可保持較高的相似性,研究提出了利用時間相鄰的HRRP 特征相關性輔助多目標跟蹤的算法,對目標并行和交叉向心飛行的情況進行了仿真分析,驗證了算法的有效性。
1 多目標跟蹤問題簡述
1.1 數據關聯
目標跟蹤過程可以定義為估計目標在當前時刻和未來任一時刻狀態的過程,目標狀態包括各種各樣運動的或描述性的參數及其精度。多目標跟蹤主要包括以下幾個功能要素:數據關聯與狀態估計、跟蹤維持(機動判決、濾波和預測)、跟蹤起始與跟蹤終結、跟蹤門規則等。多目標跟蹤的核心問題是數據關聯,而數據關聯的核心問題是計算有效回波來自目標的后驗概率[9-11]。
數據關聯算法當中有代表性的是最近鄰(Nearest Neighbor,NN)和聯合概率數據關聯算法(Joint Probability Dense Arithmetic,JPDA)。它們是以當前時刻以前的量測為條件,通過計算跟蹤波門中的候選回波與當前目標軌跡的預測位置統計意義上的距離,認為離預測位置最近的回波的后驗概率相對較大。NN算法選取與預測位置距離偏差最小的回波用于軌跡更新,JPDA算法通過計算和組合距離波門中所有回波來自于目標的后驗概率得到等效回波。但是,當被跟蹤多目標間距較小,相鄰目標產生的回波會持續地落入目標波門的交集,逐漸拉偏目標的軌跡,導致目標軌跡合并和誤跟的情況。
1.2 高分辨距離像相關性
在電磁光學區,目標的尺寸遠大于雷達信號的波長,雷達接收到的回波是目標局部位置上散射點回波的矢量和。高分辨距離像可以認為是目標多散射中心在徑向的一維投影。距離像的起伏和峰值反映了目標的幾何形狀和結構特征,并且具有易于“實時”處理和獲取的優勢,是目標識別的重要特征,因而在現代戰場環境感知中具有重要應用。Li和Yang 提出了基于匹配度的距離像匹配識別方法[12],并提出了散射點滿足不越距離走動的條件。文獻[13-14]定義了HRRP 之間的相關度為

其中,l=0,1,2,…,N,‖X‖,‖Y‖為HRRP 向量的2范數,物理意義為能量歸一化。在信號空間中,HRRP向量之間的相關性表示向量的空間距離。
雖然由于目標各散射中心之間的相互干涉、合成等交叉項的影響,距離像敏感于目標姿態角的變化,但是當相鄰兩次觀測的間隔較小、目標散射點越距離單元走動較少時,HRRP 之間的相似性可以保持較高程度。圖1為仿真錐體目標在方位角為-90°~0°范圍內的相鄰HRRP的相關性曲線。除了幾個奇異點之外,相鄰兩次回波的HRRP的相關度大都保持在0.9以上。由于雜波的分布及其波形變化的隨機性,目標相鄰回波HRRP的相關性相對于雜波是較高的。
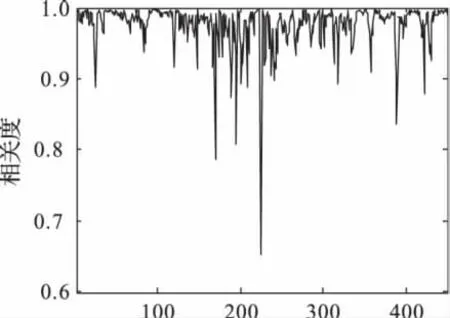
圖1 仿真目標方位角為-90°~0°相鄰HRRP 相關性曲線
2 HRRP 相關性輔助多目標跟蹤算法
2.1 HRRP 相關性輔助跟蹤分析
在大多數實際跟蹤情況下,由于缺乏被跟蹤目標的先驗信息,目標的類型及模板是未知的,所以無法使用基于特征模板的方法對目標進行分類。但是,在跟蹤過程中目標的有效回波存在兩個特點:一是同一目標的HRRP 在姿態角變化較小時能保持較高的相似性;二是目標波門中雜波的出現和波形變化是隨機的,當前時刻和前一時刻跟蹤波門中目標與雜波的相關性較低。可以通過加權的方法把時間連續的相關度信息融合到通過目標運動狀態得到的有效回波來自目標的關聯概率中,來提高跟蹤的性能。
2.1.1 運動狀態似然值
其中vtjj和Stjj分別為軌跡tj和回波j的殘差及方差。
2.1.2 HRRP 特征相關度

2.1.3 融合運動學和特征信息的關聯似然值
2.2 算法流程
根據前面的分析,把HRRP信號輔助跟蹤的算法流程總結如下:

(5)軌跡更新和預測
其中,c為歸一化因子,λ為空間雜波密度,PtD 是目標t的探測概率。使用JPDA 合成等效回波進行軌跡更新和預測。
(6)重復步驟(2)~(5),直到完成當前時刻所有目標軌跡更新和預測。
3 仿真驗證
3.1 仿真場景及參數
為了考察特征輔助跟蹤算法在密集多回波環境下跟蹤目標的有效性和穩健性,建立2 種典型仿真場景。仿真目標為3個具有軸對稱特性的錐體類目標,其尺寸如表1所示。
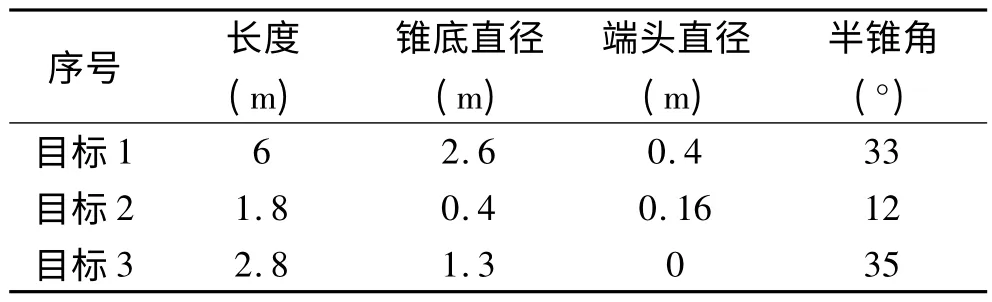
表1 仿真目標尺寸
通過目標散射仿真軟件Radbase 產生3個目標相對雷達視線角為-90°~0°的RCS 數據和HRRP,方位角步進為0.2°。仿真中設定的雷達參數如表2。
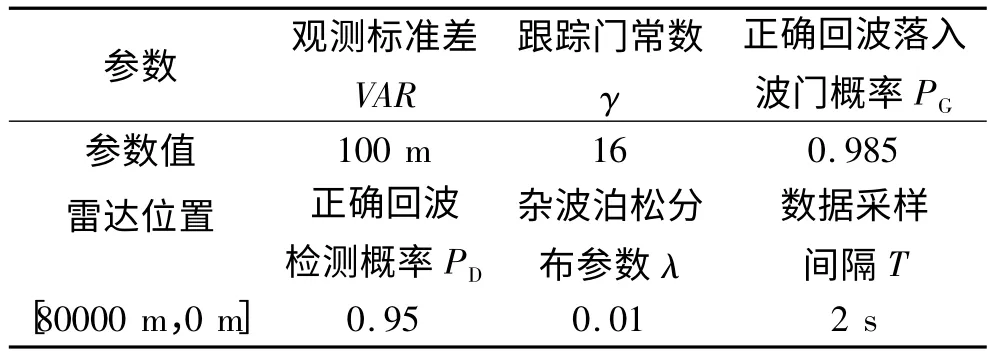
表2 仿真雷達參數參數觀測標準差
仿真目標運動信息通過Kalman 濾波在場景中實時產生,波門中雜波數量由均勻泊松分布產生,目標RCS測量數據和信噪比SNR=-10 dB的正態分布噪聲共同組成波門中的雜波。設定觀測標準差VAR=100 m,則正常跟蹤時,波門在x、y方向上的寬度為1000 m左右。設定的2個仿真場景中目標的位置和運動參數如表3、4所示。
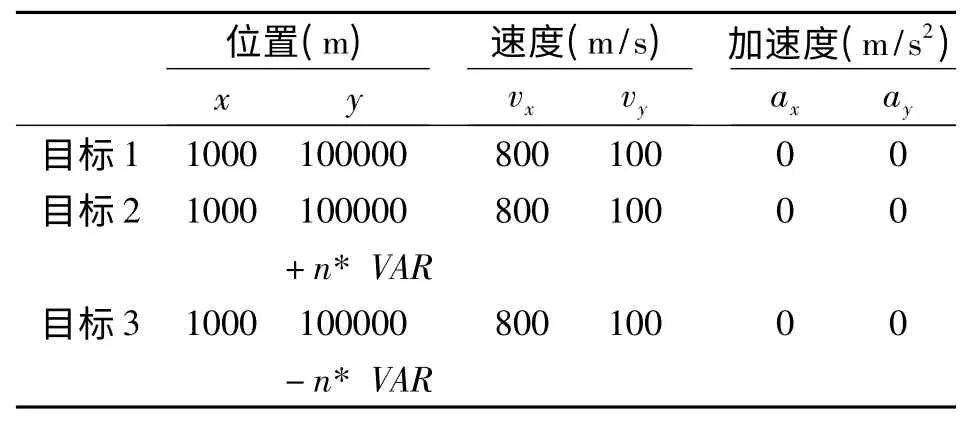
表3 目標的位置和運動參數(場景1)
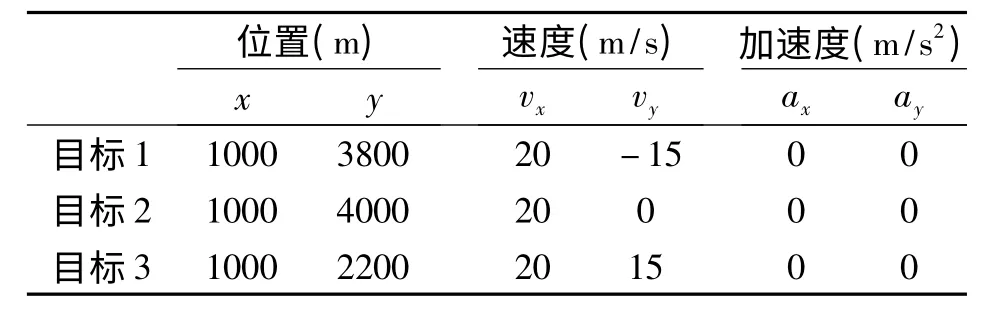
表4 目標的位置和運動參數(場景2)
3.2 仿真結果及分析
分別使用JPDA、NN、SAT和SATNN算法對下面設定的兩個場景中不同間隔的多目標進行跟蹤。
場景1 3個目標并行勻速直線飛行,目標在y方向的間隔分別為n*VAR,n=1,2,…,10。為了便于觀察和分析,選取幾個典型的跟蹤結果如圖2~圖5所示。
如圖2所示,目標波門不交迭,目標回波相互不影響。JPDA和SAT算法使用后驗概率合成等效回波的方法,僅受落入波門中雜波的影響,跟蹤軌跡與實際軌跡存在一定誤差;使用NN和SATNN時,都能正確選擇波門中的目標回波,跟蹤效果較好。
如圖3所示,目標的波門交迭較大時,即不同目標的回波相互落入相鄰目標波門時,使用JPDA算法時受合成等效回波方法制約,3個目標的軌跡相互交錯以至完全合并。NN算法的目標的軌跡也由于鄰近目標回波的影響出現軌跡交錯導致的誤跟蹤和合并的情況。SAT算法由于采用特征相關性得到回波來自目標的最大概率項,非目標回波的似然值得到抑制,雖然跟蹤軌跡存在一定的誤差,但還是能正確的跟蹤目標。SATNN算法融合了前后時間波門中回波的特征相關度和預測位置的統計距離,并選取最大項為最近鄰回波,使得跟蹤效果穩健。
場景2 3個目標從左至右勻速向心飛行,目標初始間隔600 m。
圖4為3 種目標向心飛行情況。當目標向心靠近、目標波門逐漸交迭時,采用JPDA算法,3個目標的軌跡先是被拉偏,經過交叉點后,3個目標都出現了誤跟蹤的情況。采用NN算法,目標經過交叉點前,跟蹤軌跡與實際軌跡出現一定的誤差;經過交叉點后,由于3個目標波門完全交迭,目標2的軌跡被逐漸拉偏到目標1的軌跡方向。采用基于特征輔助的SAT和SATNN算法時,雖然SAT 出現一定誤差,但都實現了目標的正確跟蹤。在上述2個仿真場景中,SATNN的目標跟蹤精度和穩健性是最好的。
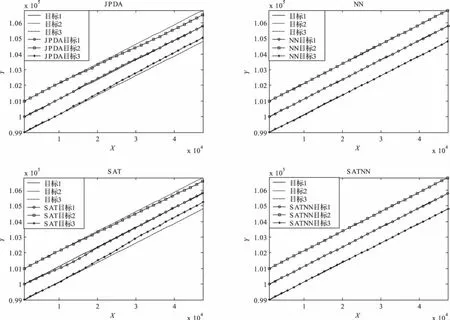
圖2 3類目標直線飛行,間隔800 m
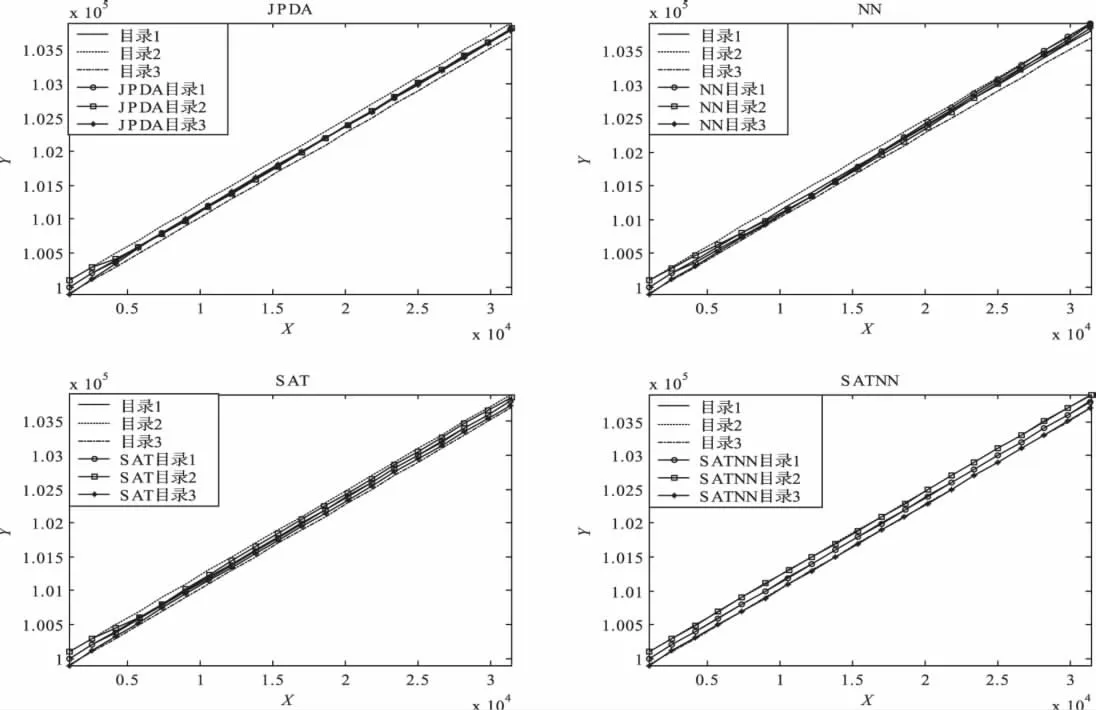
圖3 3類目標直線飛行,間隔100 m
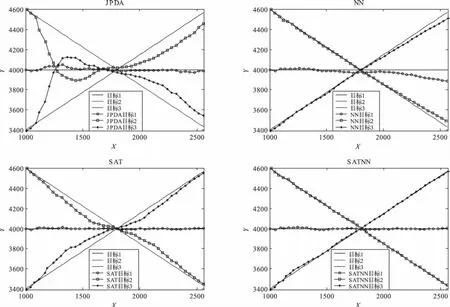
圖4 3類目標向心飛行
4 結束語
在被跟蹤多目標無先驗信息的情況下,使用HRRP 特征輔助多目標跟蹤的最近鄰算法,通過波門交迭的密集并行編隊和向心飛行兩種仿真場景,從仿真結果來看,它能克服其他跟蹤算法目標軌跡合并和誤跟的現象,對密集多回波環境下的勻速多目標實現了穩健的跟蹤。算法特別適用于多目標的特征差異較明顯的情況,而對于同類型目標,應對多種特征進行綜合處理,提取目標差異較大的特征后,用于輔助多目標跟蹤。
[1]Duy H Nguyen,John H Kay,Bradley J Orchard,et al.Whiting.Classification and Tracking of Moving Ground Vehicles[J].Lincoln Laboratory Journal,2002,13(2):275-308.
[2]Lang Hong,Ningzhou Cui,Mark Pronobis,et al.Local Motion Feature Aided Ground Moving Target.Tracking With GMTI and HRR Measurements[J].IEEE Trans.on Automatic Control,2005,50(1):127-133.
[3]Yaakov Bar-Shalom,Kirubarajan T,Cenk Gokberk.Tracking with Classification-Aided Multiframe Data Association[J].IEEE Trans.on Aerospace and Electronic Systems,2005,41(3):868-878.
[4]Kevin J Sullivan,Matthew B Resslerb,Robert L.Williams.Signature-aided tracking using HRR profiles[R]∥SPIE Report,2006:180-182.
[5]James Schmitz,John Greenewald.Model-Based Range Extent for Feature Aided Tracking[C]∥IEEE In-ternational Radar Conference,2000:166-171.
[6]Yaakov Bar-Shalom,William Dale Blair.Multitarget-Multisensor Tracking Applications and Advances:Volume III.[M].London:Artech House,2000:395-400.
[7]李斌,姚康澤,王巖,等.基于HRRP分類信息的特征輔助多目標跟蹤仿真研究[J].系統仿真學報,2008,20(13):3562-3565.
[8]李斌,姚康澤,王巖,等.基于灰關聯的分類信息輔助多目標跟蹤[J].信號處理,2009,25(3):398-402.
[9]周宏仁,敬忠良,王培德.機動目標跟蹤[M].北京:國防工業出版社,1991:219-232.
[10]吳順君,梅曉春.雷達信號處理和數據處理技術[M].北京:電子工業 出版社,2008.2:519-522.
[11]何友,修建娟,張晶煒,等.雷達數據處理應用[M].北京:電子工業出版社,2006.1:2-3.
[12]Hsueh-Jyh Li,Sheng-Hui Yang.Using Range Profiles as Feature Vectors to Identify Aerospace Objects[J].IEEE Trans.on Antennas and Propagation,1993,41(3):261-268.
[13]黃培康,殷紅成,許小劍.雷達目標特性[M].北京:電子工業出版社,2005.3:242-243.
[14]邢孟道.基于實測數據的雷達成像方法研究[D].工學博士論文,2002.3:11-13.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38