自適應(yīng)算法在單軸激光慣導(dǎo)初始對(duì)準(zhǔn)中的應(yīng)用*
2012-06-07 01:51:00冷傳營(yíng)劉錫敬
艦船電子工程 2012年10期
關(guān)鍵詞:系統(tǒng)
冷傳營(yíng) 劉錫敬
(海軍潛艇學(xué)院 青島 266042)
1 引言
單軸旋轉(zhuǎn)激光慣導(dǎo)系統(tǒng)可抑制陀螺常值漂移和加速度零偏引起的系統(tǒng)誤差,已成為我國(guó)船用慣導(dǎo)系統(tǒng)的主要研究對(duì)象之一[1]。初始對(duì)準(zhǔn)是捷聯(lián)慣導(dǎo)系統(tǒng)進(jìn)行導(dǎo)航的前提,對(duì)準(zhǔn)的精度與速度直接關(guān)系到慣導(dǎo)系統(tǒng)的精度與啟動(dòng)特性。卡爾曼濾波技術(shù)在慣導(dǎo)初始對(duì)準(zhǔn)中應(yīng)用廣泛。但在實(shí)際應(yīng)用中,卡爾曼濾波需要事先知道研究對(duì)象的數(shù)學(xué)模型和噪聲的統(tǒng)計(jì)特性。在不準(zhǔn)確的數(shù)學(xué)模型下進(jìn)行濾波,會(huì)導(dǎo)致很大的估計(jì)誤差,甚至導(dǎo)致發(fā)散。由Sage和Husa提出的極大后驗(yàn)估計(jì)器具有原理簡(jiǎn)單、實(shí)時(shí)性好的特點(diǎn),在慣性技術(shù)中得到了廣泛的推廣和利用。
2 Sage-Husa自適應(yīng)濾波算法
Sage-Husa自適應(yīng)濾波計(jì)算不斷地利用量測(cè)數(shù)據(jù)估計(jì)和校正噪聲統(tǒng)計(jì)特性與模型參數(shù),從而保證濾波始終處于正常狀態(tài),因此該方法特別適用于模型有誤差和對(duì)噪聲統(tǒng)計(jì)特性不明確的系統(tǒng)[2]。
設(shè)系統(tǒng)的狀態(tài)方程為

Wk-1,Vk為互不相關(guān)的白噪聲序列,其方差和均值分別為

Sage-Husa自適應(yīng)卡爾曼濾波算法如下[3]:


在對(duì)單軸旋轉(zhuǎn)激光慣導(dǎo)進(jìn)行初始對(duì)準(zhǔn)時(shí),系統(tǒng)噪聲一般由慣性器件組合的隨機(jī)誤差引起,比較容易進(jìn)行建模估計(jì),相反地,量測(cè)噪聲受工作環(huán)境影響很大,不確定性很大,很難確定其統(tǒng)計(jì)特性。因此,實(shí)際的工作中,模型的變化主要由量測(cè)噪聲的不確定性引起,所以在對(duì)系統(tǒng)進(jìn)行自適應(yīng)濾波校正時(shí),只對(duì)觀測(cè)噪聲方差陣Rk和觀測(cè)噪聲均值rk進(jìn)行估計(jì),這樣可以減少計(jì)算量,提高數(shù)據(jù)處理速度。
3 系統(tǒng)動(dòng)基座初始對(duì)準(zhǔn)誤差模型
3.1 旋轉(zhuǎn)方案設(shè)計(jì)[4]
導(dǎo)航坐標(biāo)系采用地理坐標(biāo)系——東北天坐標(biāo)系。方案設(shè)計(jì)為正反轉(zhuǎn)停,轉(zhuǎn)動(dòng)方式如圖1所示:先繞oz軸正轉(zhuǎn)180°,停止一段時(shí)間Th;再反轉(zhuǎn)180°,停止Th時(shí)間;接著反轉(zhuǎn)180°,停止 Th時(shí)間;再正轉(zhuǎn)180°,停止一段時(shí)間Th。以上轉(zhuǎn)動(dòng)次序?yàn)橐粋€(gè)周期,之后按上述順序循環(huán)轉(zhuǎn)動(dòng)。
3.2 動(dòng)機(jī)坐初始對(duì)準(zhǔn)狀態(tài)方程
假定3個(gè)陀螺漂移誤差模型相同,均為一階馬爾科夫過(guò)程和白噪聲之和[5]:


其中:

式中:Tg為一階馬爾科夫過(guò)程的相關(guān)時(shí)間;ωmi為激勵(lì)白噪聲。
加速度計(jì)誤差ΔAx、ΔAy主要含有零位偏置ΔAxb、ΔAyb和白噪聲ωAx、ωAy:

將陀螺漂移和加速度零偏擴(kuò)充為狀態(tài)變量,則濾波器的狀態(tài)方程為

式(6)中,狀態(tài)向量和系統(tǒng)噪聲分別為

其中
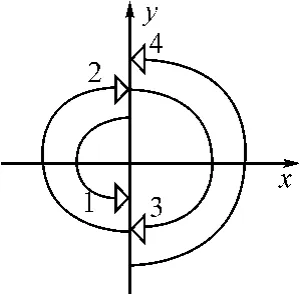
圖1 慣導(dǎo)單軸旋轉(zhuǎn)方案
式中,R 為地球半徑,ωie為地球自轉(zhuǎn)角速度,Cij(i,j=1、2、3)為捷聯(lián)矩陣中的元素。
3.3 動(dòng)基座初始對(duì)準(zhǔn)量測(cè)方程
選取兩個(gè)位置誤差作為觀測(cè)量,則系統(tǒng)的量測(cè)方程如下:

式中,Z為觀測(cè)向量,Z=δφ[]δλT;X為系統(tǒng)的狀態(tài)變量;V是系統(tǒng)觀測(cè)噪聲矢量。
4 仿真實(shí)驗(yàn)與分析
設(shè)仿真實(shí)驗(yàn)條件如下:φ取32°,載體速度為Vx=5m/s、Vy=0m/s,陀螺漂移為0.003°/h,加速度計(jì)零偏為10-4g,慣導(dǎo)三個(gè)失準(zhǔn)角分別為φx=10′,φy=10′,φz=25′,采樣周期為1s,方位軸旋轉(zhuǎn)角速度為1r/10min,為了驗(yàn)證Sage-Husa自適應(yīng)濾波對(duì)存在較大模型誤差時(shí)的濾波效果,取E(Vk)=5rk,E(VkVTj)=100Rkδkj。分別采用kalman濾波算法和自適應(yīng)濾波算法估計(jì)三個(gè)失準(zhǔn)角,均方根誤差曲線如圖2所示。

圖2 三個(gè)失準(zhǔn)角的估計(jì)誤差曲線(1σ)
仿真結(jié)果表明,當(dāng)存在較大模型誤差時(shí),Sage-Husa自適應(yīng)濾波相對(duì)于傳統(tǒng)kalman濾波的估計(jì)誤差明顯減小,穩(wěn)定性也有了一定的提高。
5 結(jié)語(yǔ)
單軸旋轉(zhuǎn)激光慣導(dǎo)系統(tǒng)動(dòng)基座初始對(duì)準(zhǔn)過(guò)程中,由于環(huán)境的變化,對(duì)噪聲的統(tǒng)計(jì)特性很難確定,會(huì)降低濾波精度,甚至導(dǎo)致濾波發(fā)散,自適應(yīng)濾波算法能夠不斷地對(duì)噪聲統(tǒng)計(jì)特性進(jìn)行實(shí)時(shí)的校正,提高了濾波的精度與穩(wěn)定性。
[1]關(guān)勁,李仔冰.旋轉(zhuǎn)式捷聯(lián)慣導(dǎo)系統(tǒng)精對(duì)準(zhǔn)方法[J].中國(guó)慣性技術(shù)學(xué)報(bào),2010,18(4):396-400.
[2]徐景碩,秦永遠(yuǎn),彭蓉.自適應(yīng)卡爾曼濾波遺忘因子選取方法研究[J].系統(tǒng)工程與電子技術(shù),2004,26(11):1152-1154.
[3]卞鴻巍,金志華,等.組合導(dǎo)航智能信息融合自適應(yīng)濾波算法分析[J].系統(tǒng)工程與電子技術(shù),2004,26:1449-1459.
[4]錢偉行,劉建業(yè),趙偉,等.基于轉(zhuǎn)動(dòng)基座的SINS初始對(duì)準(zhǔn)方法研究[J].宇航學(xué)報(bào),2008,29(3):928-932.
[5]萬(wàn)德鈞,房建成.慣性導(dǎo)航初始對(duì)準(zhǔn)[M].東南大學(xué)出版社,1998:36-62.
[6]秦永元.慣性導(dǎo)航[M].北京:科學(xué)出版社,2006:23-37.
[7]王其,徐曉蘇.旋轉(zhuǎn)IMU在光纖捷聯(lián)航姿系統(tǒng)中的應(yīng)用[J].中國(guó)慣性技術(shù)學(xué)報(bào),2007,15(3):265-268.
[8]王榮穎,許江寧,卞鴻巍.基于可觀測(cè)分析的方位旋轉(zhuǎn)式慣導(dǎo)初始對(duì)準(zhǔn)仿真研究[J].中國(guó)慣性技術(shù)學(xué)報(bào),2009,17(1):15-20.
[9]翁海娜,姚琪,胡小毛.艦船單軸旋轉(zhuǎn)激光捷聯(lián)慣導(dǎo)系統(tǒng)動(dòng)態(tài)初始對(duì)準(zhǔn)[J].中國(guó)慣性技術(shù)學(xué)報(bào),2012,20(1):34-38.
[10]董明杰,汪渤,石永生.旋轉(zhuǎn)-靜止混合對(duì)準(zhǔn)方案在旋轉(zhuǎn)火箭彈中的應(yīng)用[J].中國(guó)慣性技術(shù)學(xué)報(bào),2012,20(1):1-6
[11]朱海,莫君.水下導(dǎo)航信息融合技術(shù)[M].國(guó)防工業(yè)出版社,2002:079-112.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32