動載荷時域半解析識別方法
2012-06-02 08:10:32楊智春黨會學
振動與沖擊 2012年13期
陳 帥,楊智春,李 斌,黨會學
(西北工業大學 航空學院,西安 710072)
動載荷識別屬于結構動力學第二類逆問題研究范疇,主要包括動載荷值的識別及載荷作用部位的識別兩方面。
動載荷識別的方法大致可分為頻域方法和時域方法兩種。目前,動載荷識別的頻域方法已趨于成熟,而時域識別方法的問題甚多,為此許多學者在動載荷的時域識別方面開展了許多有意義的工作,例如:基于函數逼近的動載荷識別方法[1-4]、基于模態空間變換與Duhamel積分的動載荷識別方法[5-9]、逆系統動載荷識別方法[10-12]、SWAT 動載荷識別方法[13]以及其它方法[14-16]等。然而,這些方法都存在值得完善的地方,其根源在于動載荷識別這類逆問題在數學上的不適定性:完全依賴于數值方法進行動載荷識別,可能會過多地降低該問題的內在物理約束,而使得其求解條件惡化[5,8-9,17];相反,僅靠理論分析進行解析求解必然會提高計算的復雜度且降低識別效率,同時受模型簡化(包括物理簡化與數學簡化)方法優劣的影響較大。為提高動載荷識別效率并避免單純采用數值方法或解析方法等進行動載荷識別的不足,本文結合離散數據擬合與模態空間轉換及模態疊加原理,提出一種動載荷時域半解析識別方法,并通過數值仿真與試驗驗證此方法的可行性。
1 基本方程
1.1 模態坐標函數識別方程
對一個N自由度系統,假設已知其n(n≤N)個自由度的響應,進行模態截斷時保留m階模態,模態坐標函數采用前s階基函數進行擬合。
對N自由度系統,其物理坐標函數x(t)與模態坐標函數q(t)的轉換關系為:

即:
其中:[Φij]N×N=[φ1φ2… φN],列向量 φ1,φ2,…,φN分別為結構第 1,2,…,N 階振型,滿足 Φij=φj(i)即振型 φj的第 i個分量作為矩陣[Φij]N×N的第 i行第 j列元素。
若已知結構n個自由度的響應,為表述方便,假定已知前n個自由度的響應,則結構物理坐標x(t)與模態坐標q(t)的轉換關系縮減為:

其中:矩陣[Φij]n×N由矩陣[Φij]N×N的前 n 行元素構成。當響應已知的n個自由度并不對應于前n個自由度時,則矩陣[Φij]n×N由矩陣[Φij]N×N中已知自由度對應行的元素構成,并進行重新編號,其它響應的處理方法類似。
進行模態截斷,保留m階模態,則結構物理坐標x(t)與模態坐標q(t)的轉化關系進一步縮減為:

即:

選取一組基函數 T1(t),T2(t),…,Tr(t),…對模態坐標函數q1(t),q2(t),…,qm(t)進行最小二乘擬合。
令{Ti(t)}={T1(t),T2(t),…,Tr(t),…}T,并據精度要求截取基函數前r階進行擬合,則:

模態坐標函數擬合模型為:
即:

聯立式(4)與式(8),得:

同理,截取基函數 T1(t),T2(t),…,Tr(t),…的前r階對給定n個自由度的響應x1(t),x2(t),…,xn(t)進行最小二乘擬合。其時域響應的擬合模型為:
即:

聯立式(9)與式(11),得:

由于{Ti(t)}r×1不恒為零,故要使式(12)在任意時刻t均成立,則應有:

式中:[aij]m×r為待求解的模態坐標函數系數矩陣;[Φij]n×m可由結構固有特性分析獲得,也可直接由結構模態試驗測試得到;而[Aij]n×r則需利用離散數據曲線擬合方法獲得。
利用式(13)求解[aij]m×r,得:

式中([Φij]n×m)+滿足:

1.2 動態響應識別方程
由坐標變換與模態疊加原理,得:

聯立式(8)和式(16),得:

將式(14)代入式(17),得:

將式(15)代入式(18),得:

由此便求出由保留模態疊加得到的各自由度時域位移響應函數。對已知某些自由度速度響應或加速度響應的情況,類似的有:

其中:[bij]m×r與[dij]m×r分別為模態速度函數系數矩陣與模態加速度函數系數矩陣。
1.3 動態載荷識別方程
對多自由度系統,其動力學控制方程為:

設式(22)描述的運動方程是對結構用有限元方法進行離散化后的方程,并假定用粘性阻尼;而實際上,本文提出的方法并不僅僅針對此種形式表示的結構運動方程,該方法的使用條件為線性系統,即滿足模態疊加原理。
按照第1.2節方法識別出位移響應{xi(t)}N×1,速度響應與加速度響應中的任意一種響應后,即可利用這三者間的積分與求導關系及初始條件,得到其它兩種形式的響應[18],而后將其代入運動方程,最終識別出結構各自由度的動態載荷{fi(t)}N×1。
2 數值仿真
圖1為典型的20自由度無阻尼質量彈簧系統,其參數及外載荷為:
① 質量:m1=m2=…=m20=1kg;
② 剛度:k1=k2=…=k20=1×104N/m;
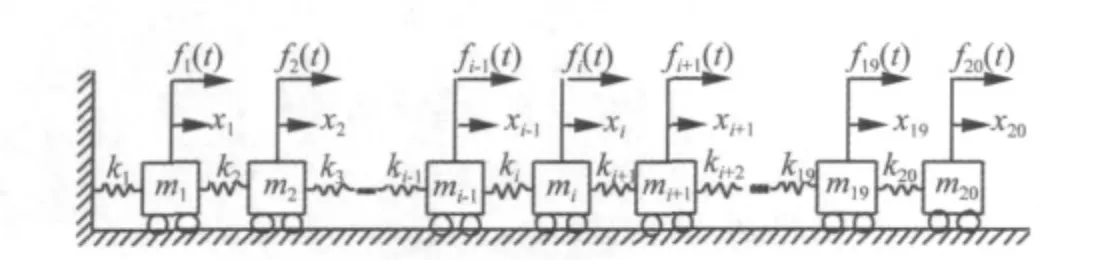
圖1 20自由度的無阻尼質量彈簧系統Fig.1 Undamped mass-spring system of20 DOFs
對圖1結構按照如下兩種工況施加外激勵:工況一 單點載荷激勵(單位:N):
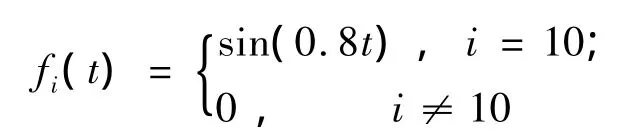
工況二 多點載荷激勵(單位:N):
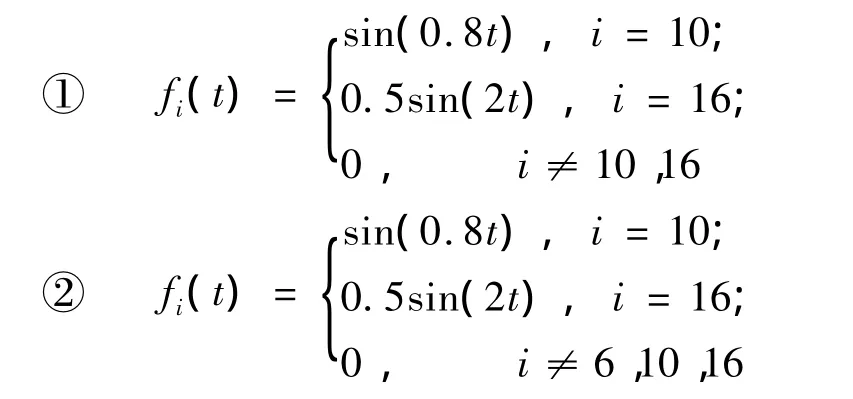
針對上兩種工況,利用MSC.NASTRAN計算求解,分別得到該兩工況下的時域位移響應,并以此為輸入(已知響應)進行動載荷識別。在此采用代數多項式1,t,t2,…,tr,…作為基函數,用最小二乘法進行曲線擬合。不過其基函數并不局限于代數多項式,實際問題中可據需要選擇較優的基函數,但其方法的實質并未改變。利用MATLAB軟件編程,實現了第1節中的動載荷識別方法,該程序的具體流程如圖2所示。
利用編寫的動載荷識別程序,可得到本節中各工況下的動載荷識別結果,如圖3~圖5所示。數值仿真結果表明:
(1)不管是單點載荷激勵(工況一)還是多點載荷激勵(工況二),其動載荷的識別結果均與實際載荷吻合較好,進而在一定程度上通過數值仿真論證了該方法的可行性;

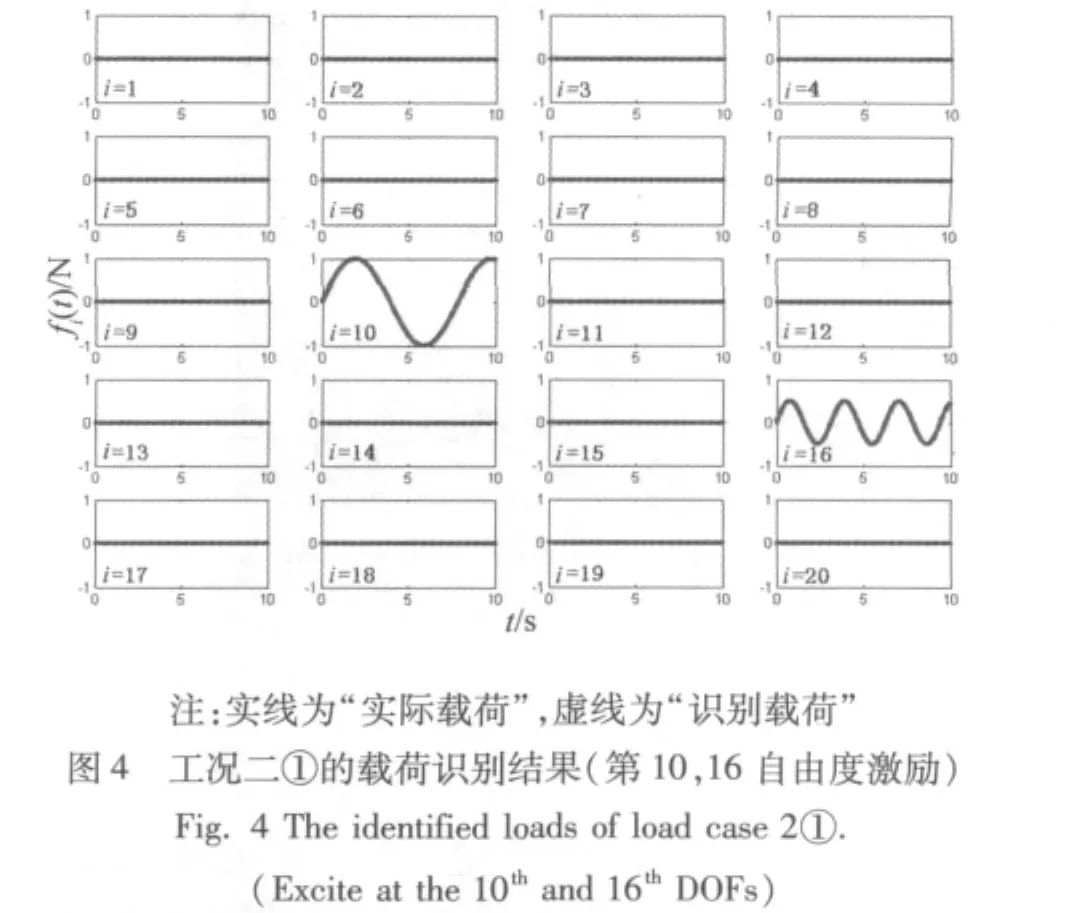
(2)該方法可以較準確地識別載荷的作用位置,因而可用來進行動載荷加載位置識別,特別是對一些具有局部動載荷激勵的結構,可用它來進行動載荷的初步定位,進而為確定后續分析中需要詳細分析的結構部件或部位提供有效的選擇依據;
(3)由于該方法可識別出各自由度上的時域動載荷,因而利用結構有限元方法中的分布載荷與結點載荷之間的轉換關系,可進行結構的時域分布動載荷識別。
圖5 工況二②的載荷識別結果(第6,10,16自由度)Fig.5 The identified loads of load case 2②.(Excite at the 6th,10th and 16th DOFs)
為進一步分析該方法的抗噪能力,針對工況二①的情況,對計算得到的動響應分別人為地增加0%,5%,10%,15%,20%,30%,50%,80%,100% 的隨機噪聲和高頻正弦噪聲,并以此為輸入識別出其動載荷時間歷程,如圖6、圖7所示。
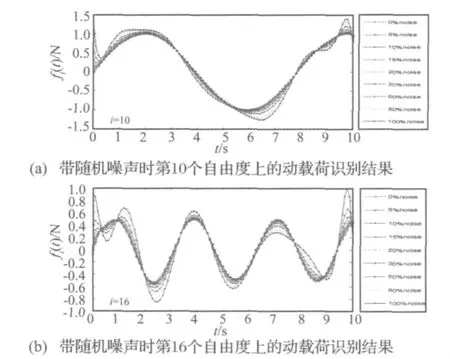
圖6 隨機噪聲下的動載荷識別結果Fig.6 The identified loads with random noise
其中,噪聲水平采用定義:

由圖6、圖7可見,雖然隨著噪聲水平的增加,其動載荷識別精度有所降低,然而即便是存在某一有用信號完全被噪聲淹沒的情況,其識別結果仍能具備可接受的精度,且在較低噪聲水平下其識別結果比較滿意,顯然此方法具有良好的抗噪聲能力。
3 實驗分析
3.1 模型簡化與動力學建模
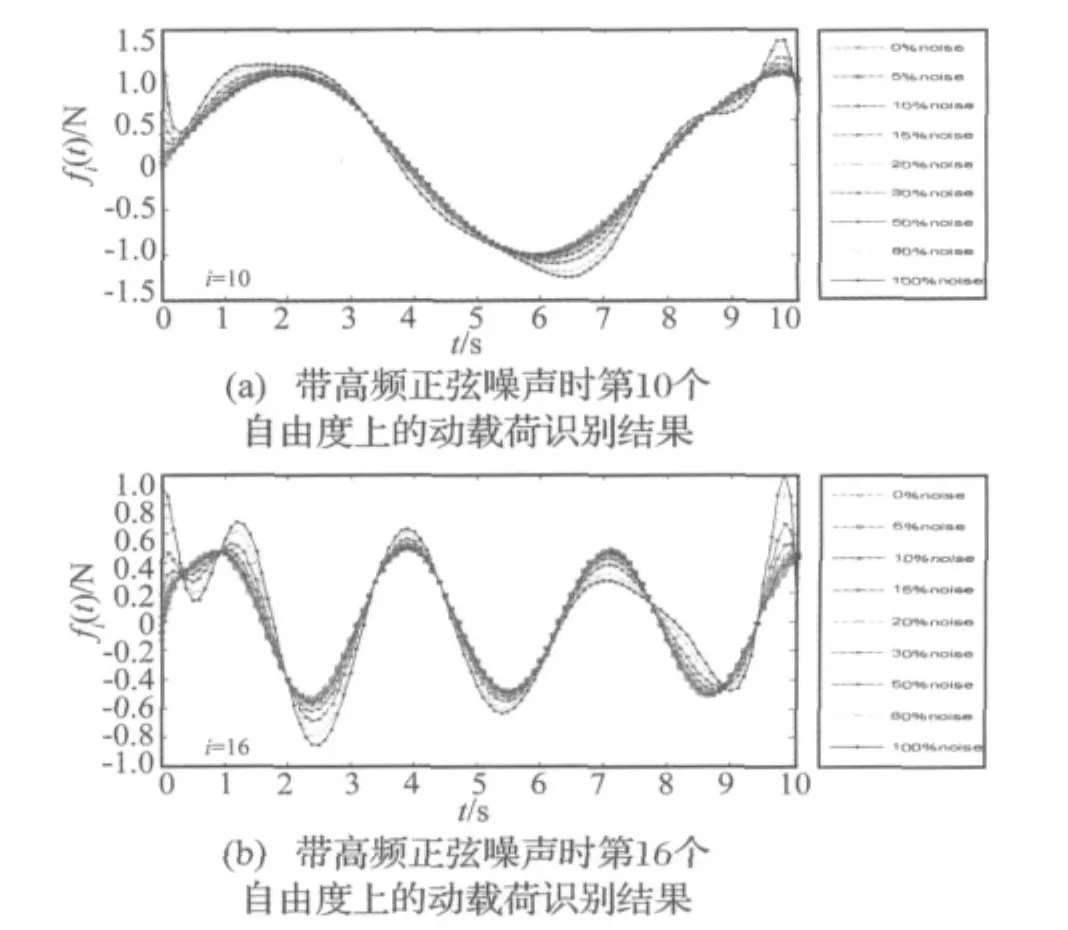
圖7 高頻正弦噪聲下的動載荷識別結果Fig.7 The identified loads with sine noise of high frequency

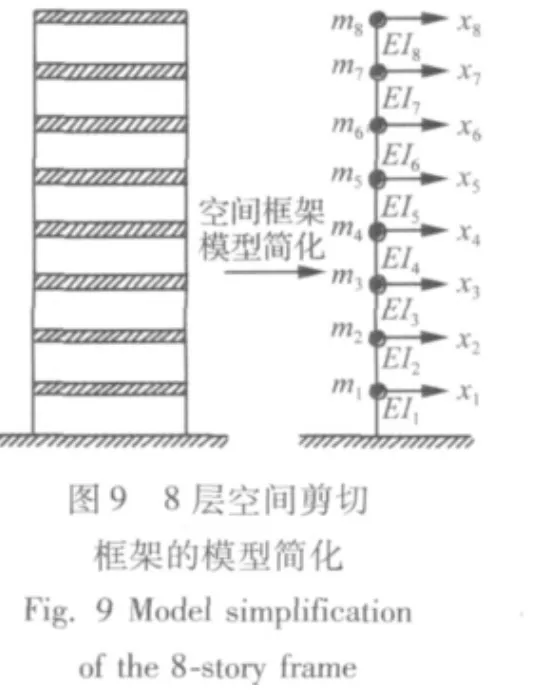
為進一步驗證該方法的可行性,設計如圖8所示的8層空間剪切框架結構,并對該結構的時域動載荷進行識別。根據該框架的結構特點進行模型簡化:① 每層的質量都集中在層間隔框上;② 剛度集中在層間支柱上;③每兩層之間有4個支柱,每個支柱由3根截面為 0.139 m ×0.027 m×0.001 m的扁鋼層疊而成,其 y方向(寬度方向)的彎曲剛度遠大于x方向(厚度方向)的彎曲剛度,只需要考慮其x方向的運動;④ 由于響應測試時間很短且該結構的阻尼較小,因而模型簡化時忽略阻尼的作用。
按上述模型簡化方法,可得到8層空間剪切框架簡化模型如圖9所示。
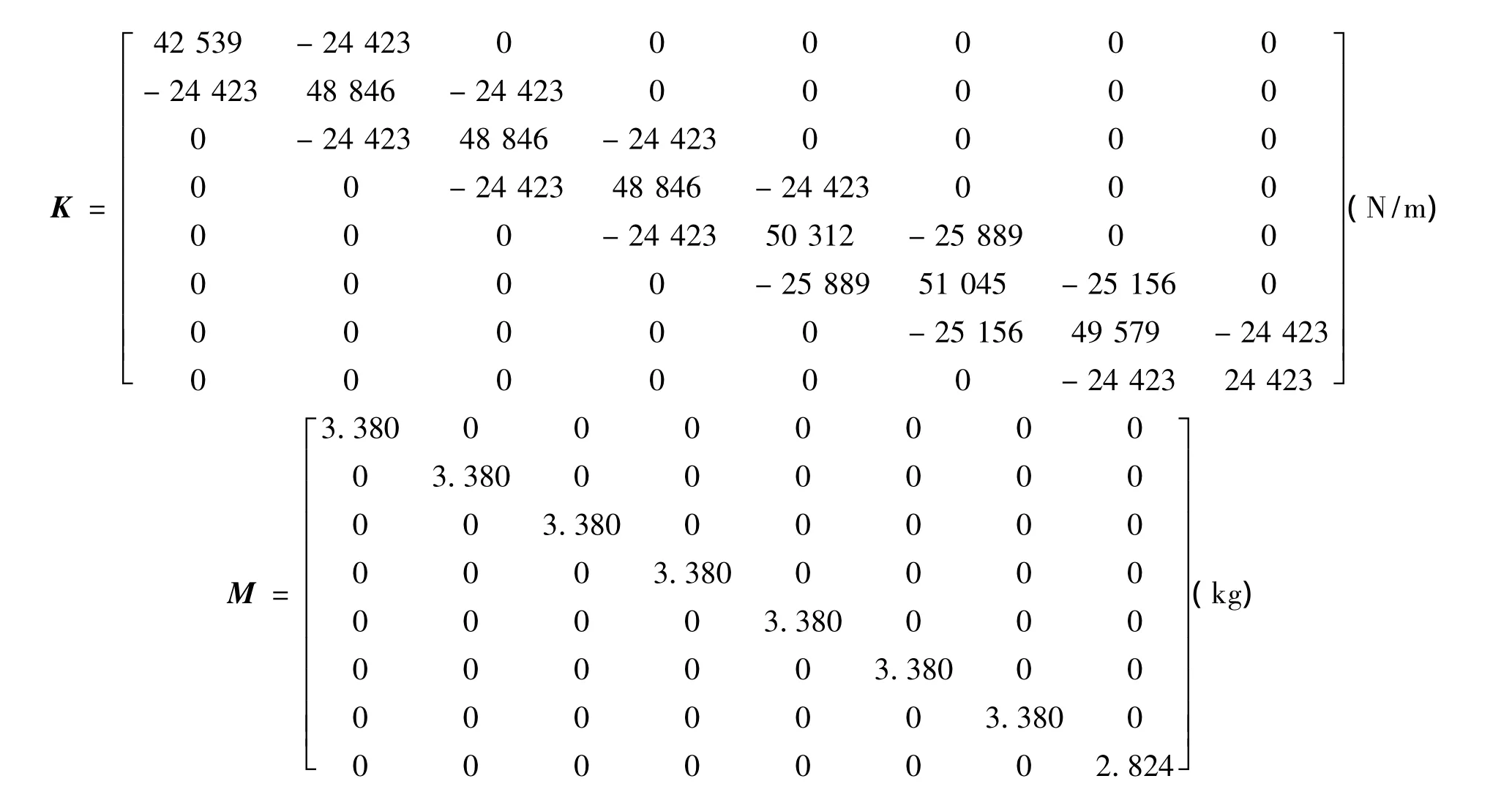
由文獻[19]中提出的基于固有頻率向量的模型修正方法,得修正后的剛度矩陣與質量矩陣分別為:
在第一層結構上施加水平方向正弦激勵載荷為f1(t)=sin(6πt)(N),而在其它各層上不進行激勵,即當i≠1時 f1(t)=0(N)。
3.2 載荷識別與結果對比分析
針對上述工況,通過試驗測試得到該工況下的時域加速度響應,以此作為輸入進行動載荷識別。同樣,采用基函數多項式 1,t,t2,…,tr,…進行測試動響應擬合,結果如圖10所示。
利用MATLAB7.0軟件編程,實現了第1節中的動載荷識別方法,得到動載荷識別結果,如圖11所示。由圖可見,除了少數自由度(第5層)外,基本上也能較好地識別出結構的動載荷。雖然其識別結果存在一定偏差,但基本上也能滿足載荷識別要求;同時其誤差主要在于載荷識別時使用的是簡化模型而非完全真實模型,試驗中空間框架僅被簡化為8自由度模型,得到的動力學模型簡化程度較高,說明對模型簡化的優劣必然會對載荷識別的結果產生影響,因而必須在載荷識別前盡可能合理地建立結構的動力學模型。此外,試驗測試誤差、噪聲干擾與擬合基函數類型及階數的選擇也會對載荷識別結果產生一定的影響。
因本算例中結構自由度較少,其動響應可通過測試獲得,已知信息較充分,故載荷識別結果很好;但考慮實際結構自由度較多且無法測試獲得全部動響應,因此為分析響應測點位置的選擇對載荷識別結果的影響,任意選擇三組測點進行加速度響應測試:① 第1,2,3,5,6,8 自由度,② 第 1,2,4,6,7,8 自由度,③ 第1,3,4,5,7,8 自由度;分別將所選測點處的測試加速度為輸入進行載荷識別,得到的動載荷識別結果如圖12所示。
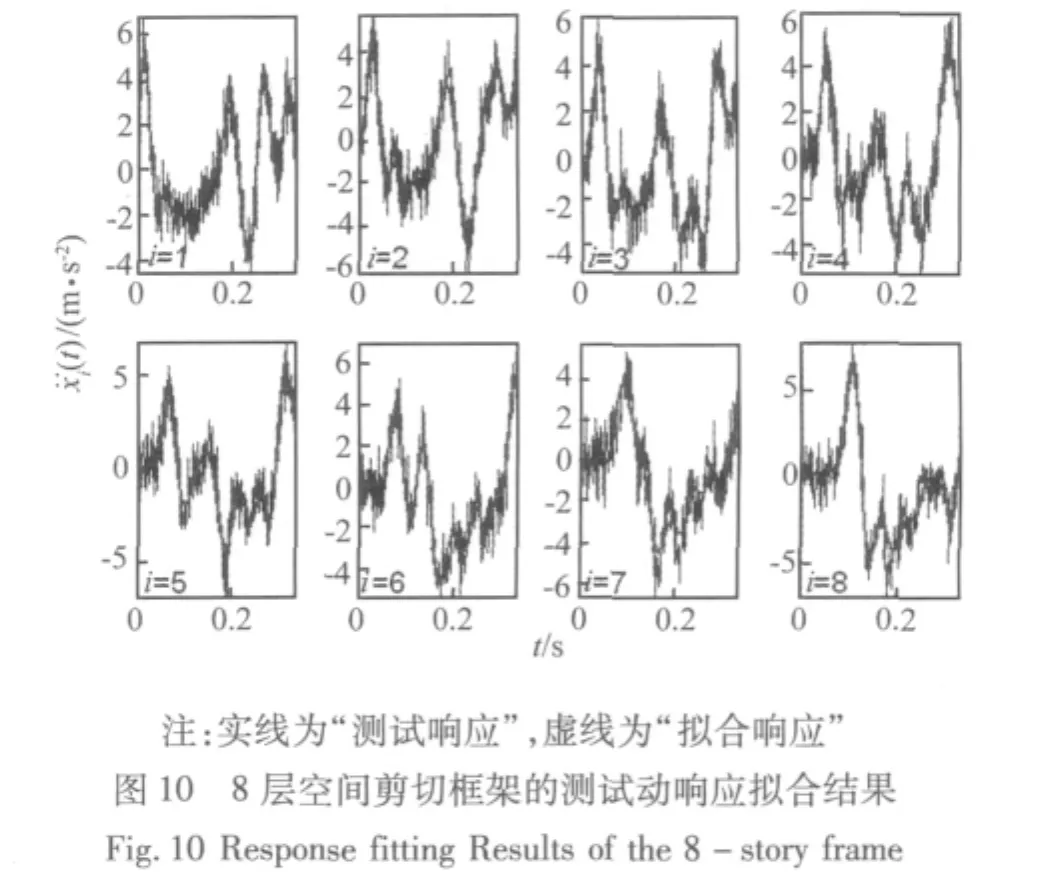
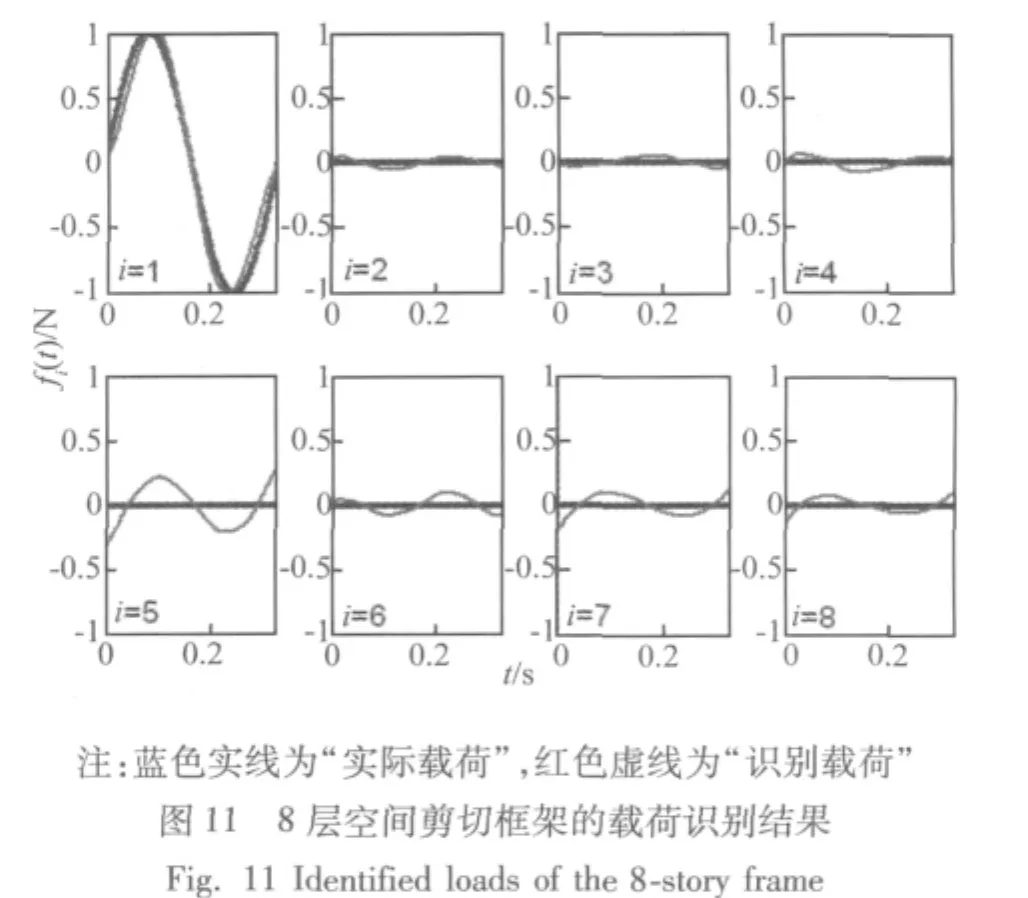

圖12 響應測點不夠時8層空間剪切框架的載荷識別結果Fig.12 Identified loads of the 8-story frame without enough testing points of response
由圖12可見,在第③種輸入情況下除少數自由度上的載荷識別誤差相對較大外,其它自由度的載荷識別結果較好;而在第①種、第②種輸入情況下,與其他相比載荷識別精度較低。結果表明,當測試響應不全(即已知信息缺失)時,載荷識別精度會降低,甚至產生較大誤差,此問題主要是由于在約束不足的情況下使用[Φij]n×m的廣義逆陣進行未知自由度響應重構所得到的是最小二乘解,且考慮到測試中存在噪聲與誤差,而各自由度測得的有用信號成分與干擾信號成分(噪聲成分及測試誤差成分等)的比例各不同,顯然所選測點組的有用信號成分比例越大,其獲得的動載荷識別精度越高;同時,識別結果的好壞與響應測點位置的選擇有關,合理地布置測點能改善識別精度,因此需要采用優化方法進行專題研究。實際應用中,測試響應不全的問題在數學及物理上只憑借測試有限自由度的響應通常都是無法徹底解決的,依靠現有的各種方法得到的動載荷僅為工程可用解(本例中是最小二乘解),是一種在有限約束下的等效載荷,而并非一定是真實解。要得到真實的動載荷則必須根據實際情況增加相應約束,考慮到結構本身具有的濾波作用,并非所有成分載荷都能引起顯著的結構響應,因而在實際應用中識別出一組相對較優的工程可用載荷也同樣具有重要意義。
4 結論
為提高動載荷識別效率并避免單純采用數值方法或解析方法進行動載荷識別的不足,本文結合離散數據擬合與模態空間轉換及模態疊加原理,提出了一種動載荷時域半解析識別方法。
以數值仿真響應為輸入的動載荷識別結果表明:無論是單點載荷還是多點載荷,該方法均能較好地實現結構動載荷大小與作用位置識別;同時,它還具有較好的抗噪聲干擾能力;此外,還可利用結構有限元方法中的分布載荷與結點載荷之間的轉換關系,進行結構時域分布動載荷識別,即具有一定的拓展潛力。而以試驗測試加速度響應為輸入的動載荷識別實例結果表明:該方法對動載荷識別的優劣程度,受模型簡化優劣程度、響應測點布置等因素影響,合理簡化模型與響應測點選擇是比較關鍵的。此外,試驗測試誤差、噪聲干擾與擬合基函數類型及階數的選擇也會對載荷識別結果產生影響。
[1]張 方,秦遠田,鄧吉宏.復雜分布動載荷識別技術研究[J].振動工程學報,2006,19(1):81-85.
[2]秦遠田,張 方.具有連續分布梁模型動載荷的識別技術研究[J].振動與沖擊,2005,24(2):126-128,133.
[3]張 方,朱德懋.動態載荷時域識別的級數方法[J].振動工程學報,1996,9(1):1-8.
[4]王彥衛,趙 玫.一種新的動態載荷識別方法[J].噪聲與振動控制,2003,3:11-13.
[5]初良成,曲乃泗,鄔瑞鋒.動態載荷識別的時域正演方法[J].應用力學學報,1994,11(2):9-18.
[6]蔡元奇,朱以文,劉禮華.動態載荷識別中的模態確定方法研究[J].振動工程學報,2006,19(4):543-547.
[7]張運良,林 皋,王永學,等.一種改進的動態載荷時域識別方法[J].計算力學學報,2004,21(2):209-215.
[8]Jiang X Q,Hu H Y.Reconstruction of distributed dynamic loads on an euler beam via mode-selection and consistent spatial expression[J].Journal of Sound and Vibration,2008,316:122-136.
[9]Jiang X Q,Hu H Y.Reconstruction of distributed dynamic loads on a thin plate via mode-selection and consistent spatial expression[J].Journal of Sound and Vibration,2009,323:626-644.
[10]魏星原,宋 斌,鄭效忠.載荷識別的逆系統方法[J].振動、測試與診斷,1995,15(3):35-43.
[10]蔡元奇,朱以文.基于逆向濾波器的動態載荷時域識別方法[J].振動工程學報,2006,19(2):200-205.
[12]饒柱石,施勤忠,荻原一郎.基于逆系統分析法的多輸入-多輸出系統動態載荷的優化估計[J].振動與沖擊,2000,19(2):9 -12,16.
[13]路敦勇,吳 淼.動態載荷識別的SWAT方法研究[J].振動與沖擊,1999,18(4):78-82,94.
[14]毛玉明,郭杏林,趙 巖,等.基于靈敏度分析的結構動態載荷識別研究[J].振動與沖擊,2010,29(10):1-3.
[15]趙玉成,袁樹清,李瞬酩,等.動態載荷的小波正交算子變換識別法[J].機械強度,1998,20(2):127-130,133.
[16]毛玉明,郭杏林,趙 巖,等.基于精細計算的動載荷反演問題正則化求解[J].動力學與控制學報,2009,7(4):308-312.
[17]劉恒春,朱德懋,張久厚.振動載荷識別的奇異值分解法[J].振動工程學報,1990,3(1):24-33.
[18]胡以懷,周秩塵.載荷識別中振動響應的簡易獲取[J].武漢交通科技大學學報,1994,9(3):247-250.
[19]王 樂,楊智春,李 斌,等.基于固有頻率向量的模型修正方法[J].西北工業大學學報,2008,26(1):93-98.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
哲學評論(2021年2期)2021-08-22 01:53:34
天天愛科學(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
數學物理學報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44