基于DSP的簡易新型機器人導航方案
2012-04-29 00:44:03楊晶惠羅培元劉滿祿
中國高新技術企業 2012年9期
楊晶惠羅培元劉滿祿
摘要:文章介紹了DSP芯片“TMS320F2808”采集并處理天花板柵格走向信息,實現了一種簡易且新型的機器人方案。文章借助DSP芯片強大的“浮點運算能力”和“PWM波輸出及中斷等功能”同時利用信號模塊電路通訊,以PID算法控制碼盤脈沖電機,最終實現了在同等物理環境下高速的“天花板柵格走向”識別和循跡(跟蹤)的目標。結果為:模型車體在實驗室地面以1m/s速度行駛,并能識別和跟蹤“天花板柵格走向”;擺幅為0.2m;調整時間為1s。文章側面論證了DSP芯片在海量數字信號處理方面的高速性和精準性,數字信號處理能力優于普通單片機。
關鍵詞:DSP;導航方案;圖像分析;PID;碼盤電機
中圖分類號:TP242文獻標識碼:A 文章編號:1009-2374(2012)13-0007-02
21世紀特殊作業環境機器人是研究的熱點,眾多學者和企業從事“機器人導航方案”的研究。目前,多數導航方案需要重新鋪設機器人識別標志。若作業環境特殊,則方案實施困難。考慮到眾多建筑本身鋪設有“石膏柵格天花板”。本文聲明了一種新型的根據“天花板柵格走向”進行機器人導航的方案。
文章介紹了DSP處理攝像頭OV7620反饋圖像信息的方案。小車轉向角和車速被精準控制,并沿天花板柵格走向快速前進。最終實現了一種新型且易行的機器人導航方案。實驗環境為空曠實驗室,天花板由石膏板重復排列形成柵格圖案。
實驗中,將小車模擬為環境機器人。小車車體為:普通模型小車支撐長桿,在長桿頂架設攝像頭。
1系統設計
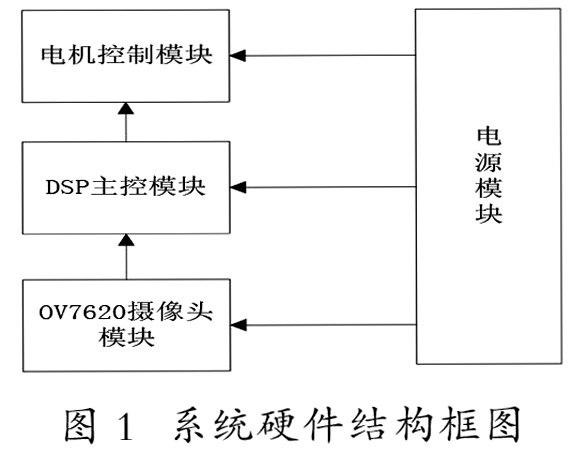
針對實驗環境,系統硬件由DSP控制模塊,視頻循跡模塊、電機驅動模塊、電源模塊組成,其結構框圖如圖1所示:
1.1主控制模塊
本系統采用DSP系列芯片中的TMS320F2808,是32位的單片機。其作為主控芯片,同外圍器件一起工作主要用來對攝像頭采集回來的數據進行讀寫,根據邊緣位置信息計算出天花板黑線的實際位置,并根據實時情況通過輸出PWM波來控制直流電機的運轉情況。
1.2視頻采集模塊
視頻采集模塊采用低功耗CMOS數字攝像頭OV7620。OV7620工作方式和輸出格式多樣,能適應不同場合。針對微型系統,采用單通道Y輸出,逐行掃描的工作方式。
對圖像的濾波方法默認為二值濾波,判斷使用卡爾曼濾波。在程序代碼中設定了閥值,將圖像中高于閥值點設置為0x00(默認為黑色),將圖像中低于閥值點設置為0xFF(默認為白色)。從而可以有效的識別天花板柵格圖像。
2系統算法設計
2.1圖像處理及控制設計
為保證數據無漂移,行信號采集使能在場信號采集使能之后開啟。捕捉到行信號后,依次采集每行中點的灰度值,下一個場信號來到時,圖像采集完成。最終通過循環查詢方式判斷黑線(直線和十字路線)分布(注:石膏柵格模型類型:直線型、十字型)。
芯片處理圖像時,從圖像底部依次向上掃描,并記錄掃描到的黑點X坐標(僅操作黑點)遞歸運算所有參數,可得X坐標整體跨度。由于小車物理坐標可抽象為圖像中(20,0),所以本跨度表(斜率)征車體傾斜狀況或位置。
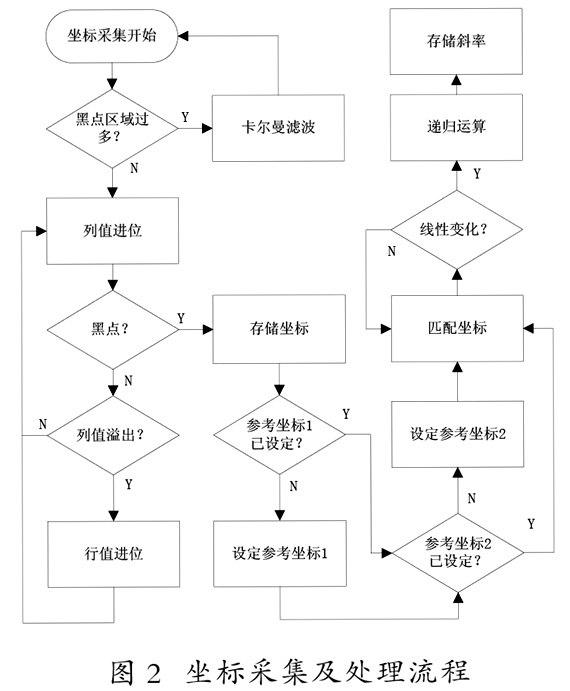
在視頻采集中最核心的部分就是坐標的采集及處理。詳細的處理流程圖如圖2所示:
系統首先判斷圖像中黑點域數量,若超出閥值,進行卡爾曼濾波修正圖像。隨后循環采集黑點坐標,采集的黑點坐標為二維數組下標值。
采集完成后,從圖像底部自下而上掃描,首先設定坐標的兩個參考點,根據參考點與處理點坐標關系,運用遞歸方法逐步計算得到斜率,在運算前首先判斷本斜率與此前存儲斜率是否線性變化。最后,根據斜率判斷車體運動情況。
2.2電機控制算法
由于固定參數的PID控制器不能很好同時實現高速度運動時小車的方向和速度的高精度控制,所以本設計采用可調參數的改進型PID控制算法對小車的方向和速度進行控制。該控制算法具有更優越的控制性能,參數鑒定方便。
3系統調試及數據分析
系統開發環境采用TMS320F28X系列DSP芯片的開發軟件 Code Composer Studio v4.2。微機通過串口軟件eSmartCameraCar觀察圖像信息,同時也能實時地優化程序。
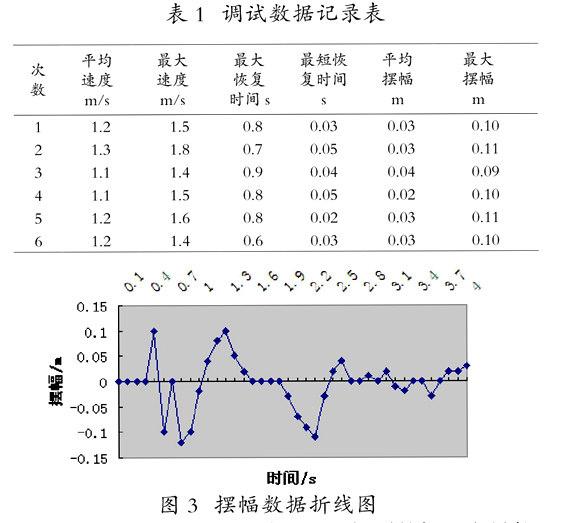
在正常情況下,車體沿天花板柵格走向直線運行,時而有擺動,經過程序優化,有明顯改善。相關調試數據見表1:
在速度方面,速度與步行速度相當;在恢復時間方面,平均時間小,最大恢復時間在1s以下;在擺幅方面,最大左右擺幅不超過實物車體寬度10%。導航方案彈性空間大,為機器人后續服務提供了有力支持。
4結語
本文設計的新型導航方案中模型小車能夠按預設情況跟蹤“實驗室天花板柵格走向”快速行駛,雖存在擺動,但在程序的優化下,擺動得到改善,如圖3所示:
最終,文章提供了一種易行且新型的機器人導航方案,在模擬實驗環境中運行良好。其核心思想為:利用環境原有標志對機器人進行導航,該導航方案移植方便,運用范圍廣,有很大的發展潛力。
參考文獻
[1]劉麗,李君.移動機器人的智能導航研究[J].計算機仿真,2011,28(9).
[2]張興悟,董二寶,章永華,等.基于DSP的移動機器人智能信號采集處理模塊研究[J].機械與電子,2006,(10).
[3]張紅濤,趙書尚,韓建海.基于COMS傳感器的智能小車設計[J].河南科技大學學報:(自然科學版),2009,30(1).
[4]卡斯爾曼著,朱志剛,等譯.數字圖像處理[M].北京:電子工業出版社,2011.
[5]姜長生,王從慶,等.自動控制與應用[M].北京:科學出版社,2007.
(責任編輯:王書柏)