基于PLC的直流伺服電機定占空比調頻調速
2012-04-27 09:54:04王平高明華馬坤公維帥榮偉
電氣傳動 2012年7期
王平,高明華,馬坤,公維帥,榮偉
(1.中國石油大學 信息與控制工程學院,山東 東營 257061;2.勝利油田技術檢測中心,山東 東營 257061)
基于PLC的直流伺服電機定占空比調頻調速
王平1,高明華1,馬坤2,公維帥1,榮偉1
(1.中國石油大學 信息與控制工程學院,山東 東營 257061;2.勝利油田技術檢測中心,山東 東營 257061)
現在很多可編程控制器(PLC)中集成了高速脈沖輸出功能,這為運動控制提供了方便,但是高速脈沖輸出的占空比一般固定不變,這使PLC直接應用到直流伺服電機調速系統中出現了困難。選用L298N驅動芯片,充分利用PLC高速脈沖輸出功能,在不增加外圍器件情況下,提出定占空比調頻調速的方法,并將其應用到IC卡生產線。實際應用結果表明直流伺服電機的轉速與PLC脈沖輸出頻率成線性關系,定占空比調頻能夠在一定條件下實現電機的精確調速。
調頻調速;定占空比;伺服電機;可編程控制器
1 引言
隨著PLC技術的發展,PLC的功能明顯增強。現在很多品牌、很多型號的PLC[1]中都集成了高速脈沖輸出功能,這為運動控制提供了極大的方便。目前直流電機常用的調速方法是PWM調速、弱磁調速[2]等,但是一般PLC的高速脈沖輸出頻率在很大范圍內可以變動,而占空比固定不變,對于占空比不變的高速脈沖輸出來說,直接應用PWM調速、弱磁調速等方法就很難實現。現在開關器件一般開關頻率都很高,集成直流電機驅動芯片開關時間也非常短,本文中選用的L298N是μs級的,還有ns級的LMD18200等芯片,這些驅動芯片的存在為定占空比調頻調速的應用提供了便利。本文充分利用PLC高速脈沖輸出功能,不增加外圍器件,利用L298N芯片,提出一種固定占空比、通過改變輸入脈沖頻率實現直流伺服電機轉速調節的方法。
2 定占空比調頻調速原理
改變電機端電壓是目前實現直流電機調速的主要方法,只要改變直流伺服電機的端電壓就可以實現電機的調速[3]。如圖1所示,在以PLC為控制核心的直流伺服電機控制系統中,利用驅動芯片L298N構建驅動電路,以PLC高速脈沖輸出作為驅動電路輸入。在保證直流伺服電機電樞電流不斷續的情況下改變PLC輸出脈沖頻率,研究脈沖頻率對直流伺服電機端電壓的影響。
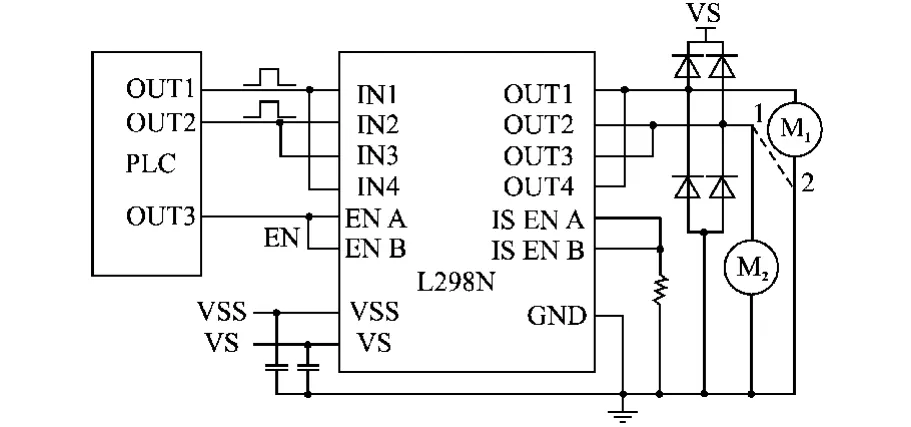
圖1 基于PLC的直流電機控制系統Fig.1 Control system for DC motor based on PLC
利用L298N驅動直流伺服電機,為了提高L298N的驅動電流,將兩路輸入、輸出并聯使用,若要實現電機的正反轉,將圖1中的1,2端短接,即可實現電機M1的正反轉。為了實現電機的速度可調,在輸入端采用高速脈沖輸入。現以直流伺服電機M1的速度控制為例分析。
假設輸入脈沖周期分別為T1,T2,T3,占空比ρ為1/2,脈沖高低電平為TTL電平,理想條件下M1的端電壓波形u(t)見圖2。根據圖2可知,電機M1端電壓u(t)在1個周期內的平均值,即電機的端電壓Ud在不同脈沖周期下均為下式的值,

無論脈沖頻率如何改變,均不會改變直流伺服電機的端電壓Ud。

圖2 理想情況下u(t)的波形Fig.2 Ideal waveforms of u(t)
在實際情況下,由于L298N內部開關延遲時間的影響,電機M1端電壓u(t)的實際波形并不是嚴格的脈沖方波,將驅動芯片L298N的開關延遲時間考慮在內,分2種情況討論直流伺服電機端電壓Ud與PLC輸出脈沖頻率f的關系。
2.1 L298N開關頻率大于PLC高速脈沖頻率
在保證PLC輸出脈沖頻率大于使直流伺服電機電樞電流連續的最小頻率條件下,電機M1兩端電壓u(t)的實際波形如圖3所示。

圖3 實際情況下u(t)的波形Fig.3 Actual waveforms of u(t)
當輸入脈沖周期T大于L298N的開關延遲時間時,忽略L298N內部每次動作開關延遲時間上的微小差異,把L298N每次開關造成通斷時間上的延遲看做相同的。在高速脈沖周期為T,脈沖頻率為f時,分析電機M1上的直流電壓Ud。如圖4所示,L298N導通時的延遲時間在電壓u(t)波形上形成的面積為Δs1,關斷時的延遲時間在電壓u(t)波形上形成的面積為Δs2,占空比為ρ,則得到下式:
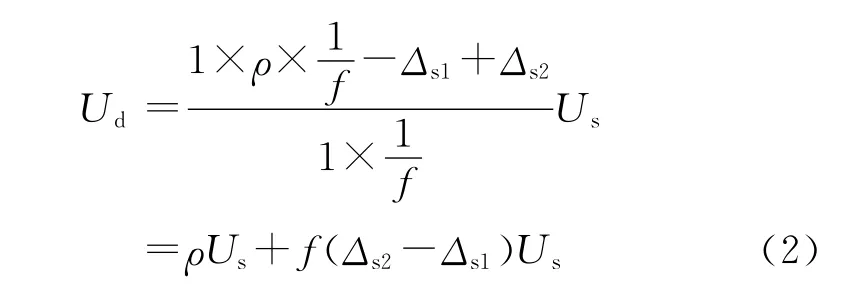
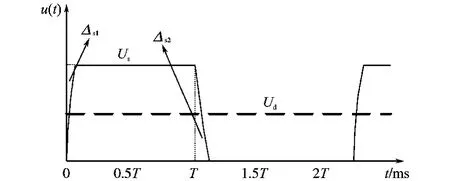
圖4 輸入脈沖頻率為f時電壓u(t)的波形Fig.4 Waveform of u(t)when frequency of input pulse is f
在式(2)中,由于L298N的關斷延遲時間大于導通延遲時間,Δs2必然大于Δs1,這就說明在考慮L298N內部開關延遲時間影響后,實際情況下驅動電路輸入脈沖周期不同時,直流伺服電機M1上的端電壓Ud是不相同的。在高速脈沖頻率小于驅動芯片開關頻率、大于保證電樞電流連續的最小頻率條件下,直流伺服電機的端電壓Ud與占空比ρ成正比,與輸入脈沖頻率f成正比,2個變量都與驅動芯片輸出的端電壓Ud具有線性對應關系,固定占空比調頻可以改變直流端電壓Ud,從而改變直流伺服電機的轉速。
2.2 L298N開關頻率小于PLC高速脈沖頻率
此種情況下,L298N會長期處于一直導通的狀態,實際電機的端電壓u(t)波形如圖5所示。在這種情況下固定占空比、調節輸入脈沖頻率仍然可以改變直流伺服電機M1的端電壓Ud,從而達到調速的目的。隨著脈沖頻率f的不斷提高,相應的電機端電壓Ud會不斷增大,電機的旋轉速度也會不斷加快,但是這種脈沖頻率f的改變與端電壓Ud的變化不再是線性關系,控制器只能定性地知道脈沖頻率f改變引起端電壓Ud改變和電機速度變化的趨勢,很難定量得到脈沖頻率f的變化量與電機端電壓Ud變化量、電機旋轉速度變化量之間的具體對應關系。所以當PLC輸出的脈沖周期T小于驅動芯片L298N的開關延遲時間時,定占空比調頻調速只適合應用于直流伺服電機的定性調速,不能用于電機速度的精確控制。
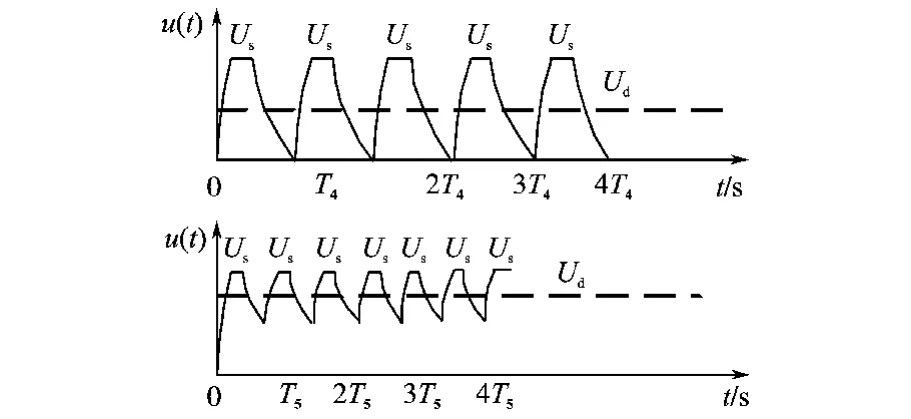
圖5 脈沖頻率大于開關時間時u(t)的波形Fig.5 Waveforms of u(t)when pulse frequency is higher than the switching time
3 在IC卡生產線上的實際應用
IC卡生產線是由入卡、寫磁、翻轉、燙金、凸凹字、出卡等多個模塊組合而成的生產線,其中每個模塊均采用FP∑型號的PLC進行集成控制。IC卡生產線上很多小型傳輸電機因走卡數量、不同模塊工作速度及機械結構的不同,需要在3 000~5 000r/min高速范圍內進行調速。由于過多的外圍電路不利于模塊集成和生產線的穩定,定占空比調頻調速又可以減少外圍器件和芯片,利用松下FP∑型號PLC的高速脈沖輸出功能,使用F172指令為L298N的輸入端提供高速脈沖,就可以直接控制IC卡生產線上小型直流伺服電機的運動速度,這使IC卡生產線上小型高速直流伺服電機的控制變得非常方便。
3.1 FP∑PLC高速脈沖輸出功能及F172指令簡介
FP∑PLC配備標準的高速脈沖輸出功能,脈沖輸出頻率單路時可達100kHz,雙路時可達60kHz;可使用 Pulse/Sign輸出方式或 CW/CCW輸出方式進行高速脈沖的輸出。PLC通過高速脈沖輸出功能可以輕松實現步進電機、直流伺服電機等電機的控制。
F172[4]指令是FP∑PLC中可設定目標值的JOG運行指令。該指令通過數據表設定高速脈沖輸出的控制代碼(含頻率范圍、輸出方式等)、脈沖頻率和輸出通道。F172指令的應用如圖6所示,執行圖中的數據表程序后,當XB為ON時,PLC就會從Y0輸出300Hz的脈沖。
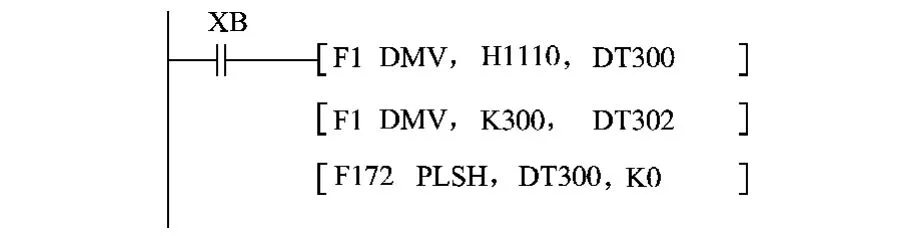
圖6 F172指令使用范例Fig.6 Example of command F172
3.2 PLC輸出脈沖頻率f的選取
在實際應用中,為了保證PLC輸出脈沖頻率與直流伺服電機端電壓的線性對應關系,脈沖頻率的選取要估算驅動芯片L298N的開關頻率。根據L298N輸入電流上升、下降及開關延遲時間[5]可知L298N開關時間一般為

考慮二極管續流等其它因素的影響,實際使用時將總的開關時間選為

若要求電機能夠正反轉,還需要考慮L298N的電流換向頻率,一般換向頻率為25kHz;同時為了保證直流伺服電機電樞電流不出現斷續,PLC脈沖輸出頻率要大于電樞電流斷續的下限,經測定選擇的帶減速箱的PITTMAN 8222系列直流電機的下限為20Hz。
綜合上述多方面的考慮,PLC輸出的脈沖頻率f應該滿足:

3.3 具體應用
取L298N的電源為28.14V,即Us=28.14 V,占空比取ρ=1/2,所使用的直流伺服電機額定轉速為5 420r/min,額定電壓為24V,電樞電阻基本為0;減速箱型號為PITTMAN G35A,減速比為19.5∶1。在20Hz和20kHz之間選擇PLC輸出的脈沖頻率,由于電機轉速不易測量,在不同頻率下測得L298N的輸出端電壓,即電機M1的端電壓Ud,并計算出相對應的轉速,得到表1。

表1 不同頻率下的電機端電壓和轉速Tab.1 Voltage and speed of DC motor at different frequency
利用Matlab曲線擬合工具箱,將上述Ud和f的數據進行曲線擬合得到圖7,擬合方程選為

其中,自變量為f,因變量為Ud,由前面的理論推導可知,此處的a=(Δs1-Δs2)Us,c=ρUs,也就是說在電源電壓固定的情況下,占空比ρ只會改變曲線的截距,與曲線的斜率無關。圖7所示的曲線是ρ=1/2時的端電壓U與驅動電路輸入脈沖頻率f的對應關系,得到擬合方程為

從圖7及得到的式(7)可以看出:L298N輸出端連接的電機M1端電壓Ud與PLC的輸出脈沖頻率f具有嚴格的線性對應關系,隨著脈沖頻率f的增加,端電壓Ud是線性增加的,從而帶動直流伺服電機的轉速線性增大;當PLC的脈沖輸出頻率在50Hz~15kHz變化時,IC卡生產線上的小型直流伺服電機轉速在3 188.83~5 706.87r/min間變化,滿足生產線上小型傳輸電機的工作調速需求范圍3 000~5 000r/min,并且減少了常規PWM調速所需外加的器件。

圖7 電壓U與脈沖頻率f的對應關系Fig.7 The contrast relation between voltage U and pulse frequency f
4 結論
定占空比調頻調速由于考慮驅動芯片的開關頻率,使PLC的高速脈沖功能在直流伺服電機調速系統中得到充分利用,并保留了PWM調速范圍寬、可實現均勻無極調速的優點;在FP∑PLC控制的IC卡生產線上,定占空比調頻調速通過簡單的F172指令,實現了生產線上小型直流伺服電機在要求的轉速范圍內可調,并且大大減少了生產線的外圍電路,提高了集成模塊的可靠性。另外,占空比保持在1/2不變,只調節脈沖頻率進行調速可以實現電子器件完全導通、完全關斷,能夠提高電子器件的使用壽命;同時,較高的電子器件開關頻率還能保證電樞電流輸出波形比較光滑、諧波較少,這對電機的運行、維護也大有好處。
[1] 王得毅.PLC抗干擾措施及分析[J].電氣傳動,2010,40(4):78-80.
[2] 龔世纓.瞬時無功功率理論在弱磁調速中的應用[J].電氣傳動,2006,36(6):34-35,41.
[3] 楊興瑤.電動機調速的系統及原理[M].第2版.北京:中國電力出版社,1995.
[4] 松下公司.FP∑用戶手冊[Z].2006.
[5] ST Microelectronics.L298N使用說明[Z].2000.
[6] 陳伯時.電力拖動自動控制系統[M].第3版.北京:機械工業出版社,2003.
[7] 吳介一.寬調速高精度直流伺服控制系統的研究[J].電氣傳動,1995,25(5):27-30.
修改稿日期:2012-01-10
DC Servo Motor′s Speed Regulation Method of Adjusting Frequency at Fixed Duty Cycle Based on PLC
WANG Ping1,GAO Ming-hua1,MA Kun2,GONG Wei-shuai1,RONG Wei1
(1.InformationandControlEngineeringInstitute,ChinaUniversityofPetroleum,Dongying257061,Shandong,China;2.TechnologyInspectionCenter,Dongying257061,Shandong,China)
Many programmable logic controllers(PLC)have integrated high-speed pulse output functions,which provide convenience for motion control.But high-speed pulse output of fixed duty cycle caused difficulties when PLC directly applied to the PWM speed regulation of DC servo motor.Took full use of PLC′s highspeed pulse output selected the driver chip L298N,and proposed the method of adjusting the frequency to change speed at fixed duty cycle without extra external devices and applied to production line of IC card.Experimental result shows the DC servo motor speed and the pulse output frequency is linear relationship.The method can achieve the precise speed regulation of DC servo motor.
speed regulation by adjusting frequency;fixed duty cycle;servo motor;programmable logic controller
TM383
A
王平(1956-),男,教授,碩士生導師,Email:wp8393030@126.com
2011-07-11
