全自動晶圓劃片機(jī)軟件系統(tǒng)的設(shè)計與實現(xiàn)
2012-03-26 06:37:54劉婷婷趙志偉李戰(zhàn)偉閆啟亮
電子工業(yè)專用設(shè)備 2012年6期
劉婷婷,趙志偉,李戰(zhàn)偉,閆啟亮
(北京中電科電子裝備有限公司,北京100176)
全自動晶圓劃片機(jī)是集成電路半導(dǎo)體加工后封裝工藝中的重要組成部分,利用金剛石薄片砂輪在高速旋轉(zhuǎn)時的切削能力,對硅片、鈮酸鋰、石英等脆硬材料進(jìn)行開槽劃片加工,也可用于劃片和切割各種陶瓷、玻璃、金屬等。
我國在全自動劃片機(jī)這一領(lǐng)域,目前主要依賴于進(jìn)口,如DISCO,TSK等設(shè)備,且操作界面不是全中文界面,這樣對普通操作人員的文化程度要求較高。
1 設(shè)備介紹
全自動晶圓劃片機(jī)是集自動上下料,自動圖像對準(zhǔn),自動劃切和自動清洗等工序為一體的設(shè)備,不僅滿足劃切工藝的要求,更節(jié)省了劃切過程中操作工人多次手動放料、對準(zhǔn),以及拿料、清洗等工序的時間,從而有效提高了劃切效率。全自動晶圓劃片機(jī)主體結(jié)構(gòu)可分為主機(jī)部件、預(yù)對準(zhǔn)部件、自動上下片部件和自動清洗部件4個單元,其核心部分是主機(jī)部件。主機(jī)部件通過驅(qū)動X,Y,Z,θ四個軸,及主軸、其它相關(guān)閥等實現(xiàn)自動劃切、自動圖像對準(zhǔn)等功能。自動上下片部件通過驅(qū)動晶片盒,上、下機(jī)械臂,X軸,θ軸、預(yù)對準(zhǔn)來實現(xiàn)自動上下料功能。自動清洗部件實現(xiàn)自動清洗功能。如圖1所示。

圖1 設(shè)備外觀圖
2 軟件控制系統(tǒng)設(shè)計
2.1 二次封裝
按照物理結(jié)構(gòu)可分為三部分:上位機(jī)、下位機(jī)、執(zhí)行部件。如圖2。操作人員通過人機(jī)交互界面下達(dá)指令,由can總線控制卡來驅(qū)動多個機(jī)械模塊運(yùn)動,并通過總線IO控制來獲得各個閥及傳感器的狀態(tài)。根據(jù)用戶在實際操作過程中使用的功能和便于維護(hù),界面設(shè)置模塊如圖3所示。
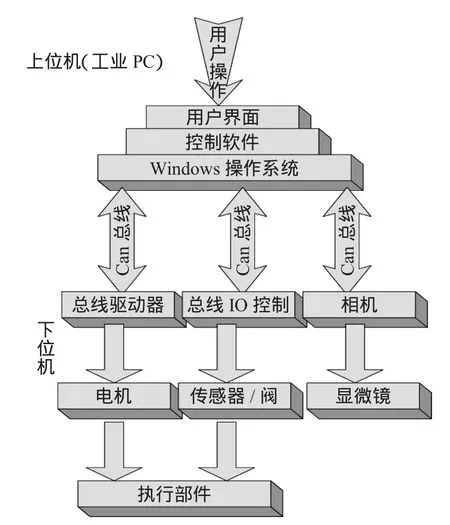
圖2 物理結(jié)構(gòu)圖

圖3 設(shè)備主界面圖
在以往的設(shè)計理念中,程序員會直接調(diào)用控制卡商家提供的函數(shù),如圖4。忽略了在設(shè)備硬件前期設(shè)計過程中,一些IO口甚至卡的采用可能發(fā)生變更,一旦更換了控制卡則程序代碼要作大量的修改,且如果運(yùn)動控制模塊封裝的不好,人機(jī)交互界面的代碼也要隨之發(fā)生改動,不便于維護(hù),因此在系統(tǒng)設(shè)計中引入了“二次封裝”這一概念。
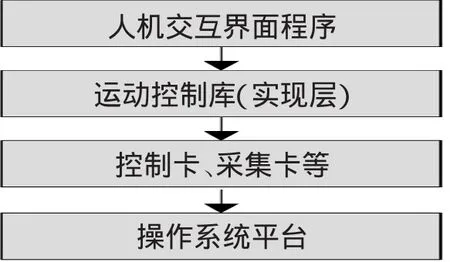
圖4 舊層次圖
“二次封裝”是把與硬件相關(guān)的函數(shù)進(jìn)行封裝,這個封裝并不是把控制卡廠商提供的函數(shù)進(jìn)行簡單的封裝,而是根據(jù)需求分析作出需要用到控制卡的哪些功能,將這些功能逐一封裝在動態(tài)庫中,這一層的封裝與硬件是息息相關(guān)的。如圖5。運(yùn)動控制模塊完全脫離硬件部分實現(xiàn)全自動晶圓劃片機(jī)工作過程中動作,當(dāng)需要更換硬件時只需要修改卡功能封裝層代碼,并且調(diào)通即可,不需要更改實現(xiàn)層和應(yīng)用層代碼。
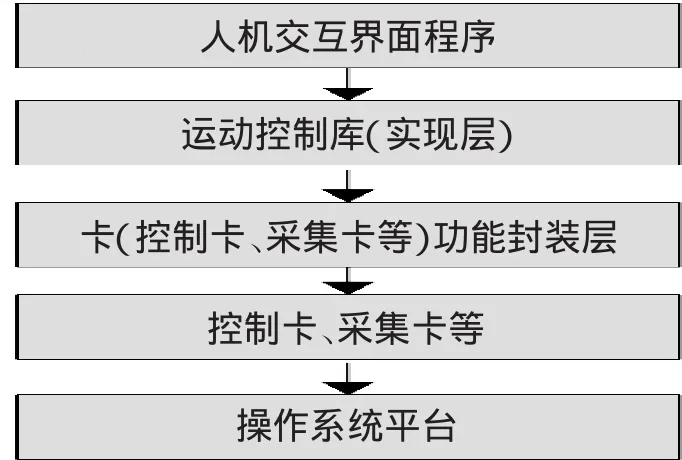
圖5 新層次圖
2.2 多線程設(shè)計
系統(tǒng)執(zhí)行全自動晶圓劃切過程如圖6,開始執(zhí)行全自動晶圓劃切過程,檢測設(shè)備狀態(tài),掃描晶片盒,晶片盒中有片,則取片到劃切工作臺,執(zhí)行自動對準(zhǔn)、自動劃切動作,自動劃切完成,取片到清洗工作臺,自動清洗完成,下片到晶片盒。從流程圖可以看出,在全自動劃切過程中,當(dāng)機(jī)械臂把工件放置到劃切工作臺上,在自動對準(zhǔn)和自動劃切過程中機(jī)械臂是空閑的,此時再執(zhí)行晶片盒掃描,機(jī)械臂取片,同時清洗工作臺也可以執(zhí)行自動清洗動作。為了提高設(shè)備工作效率,并有良好的交互性,程序中大量使用多線程設(shè)計,使得多個工序同時進(jìn)行。
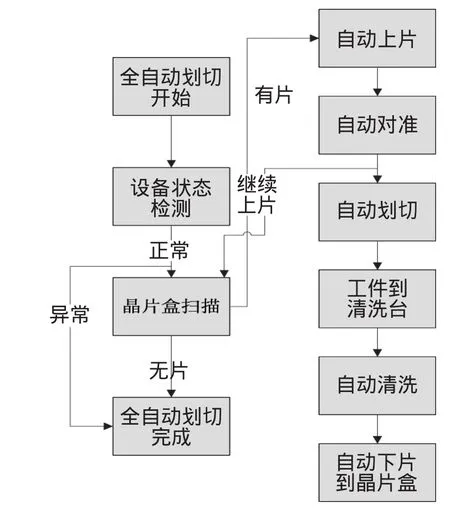
圖6 全自動流程圖
2.3 界面脫離運(yùn)動邏輯
全自動晶圓劃片機(jī)動作復(fù)雜,一個功能的實現(xiàn)需要幾個軸的聯(lián)動配合,且存在多個工序同時工作,當(dāng)操作員熟悉設(shè)備后,他可能會快速地點擊界面上的按鈕,而不去理會上個動作是否執(zhí)行完成,況且操作員也不會去考慮運(yùn)動到位及各個軸的安全位置。因此程序員需要考慮當(dāng)前動作是否可以執(zhí)行。以前的劃片機(jī)設(shè)計是把運(yùn)動功能的實現(xiàn)和運(yùn)動邏輯判斷都放在界面上,無疑加重了界面的負(fù)擔(dān),模塊劃分不明確,且后期維護(hù)困難。因此把邏輯功能分為兩類:界面邏輯和運(yùn)動邏輯。界面邏輯判斷文件是否完整,參數(shù)是否合理,運(yùn)動邏輯則判斷運(yùn)動功能是否正確、安全,以及功能是否可以執(zhí)行等。此時的運(yùn)動和界面的聯(lián)系不是太過于密切,如果設(shè)備需要改進(jìn),由于運(yùn)動庫和界面庫各具有邏輯功能,它們是相對獨立的,如果覺得界面不符合要求需要重新設(shè)計那么運(yùn)動庫即應(yīng)用層是不需要更改的,同樣,如果覺得運(yùn)動庫不符合要求,重新設(shè)計應(yīng)用層即可。
3 軟件控制系統(tǒng)實現(xiàn)
如圖3,全自動晶圓劃片機(jī)控制系統(tǒng)主要由7個功能模塊組成。其中,自動劃切功能、手動劃切功能、劃切參數(shù)功能、刀片維護(hù)功能、操作員維護(hù)功能對操作員開放;裝置維護(hù)功能對普通維護(hù)人員開放;工程維護(hù)功能開放給設(shè)備生產(chǎn)商,部分開放給設(shè)備維護(hù)人員。
(1)自動劃切功能模塊實現(xiàn)全自動劃切功能。
(2)手動劃切功能模塊將全自動劃切功能分解,增加半自動劃切功能如圖7所示。
(3)劃切參數(shù)設(shè)置模塊包括劃切參數(shù)、對準(zhǔn)參數(shù)、清洗參數(shù)。負(fù)責(zé)對與劃切、對準(zhǔn)、清洗功能相關(guān)文件的設(shè)置、修改、刪除、拷貝、復(fù)制、重命名、移動、文件選定功能。
(4)刀片維護(hù)功能模塊執(zhí)行換刀、測高、NCS傳感器清掃、傳感器校正、基準(zhǔn)線調(diào)整、刀破檢測裝置調(diào)節(jié)以及這些功能相關(guān)文件的存儲、查看、設(shè)置等功能。
(5)操作員維護(hù)功能模塊進(jìn)行預(yù)劃切文件設(shè)置、拷貝、刪除功能實現(xiàn),測量功能實現(xiàn),功能參數(shù)文件設(shè)置。
(6)裝置維護(hù)功能模塊進(jìn)行回轉(zhuǎn)軸中心位置獲取并設(shè)置、像素尺寸測量、顯微鏡偏差獲取設(shè)置,以及模擬傳感器參數(shù)設(shè)置,上下料部件功能檢查。
(7)工程維護(hù)功能模塊開放給設(shè)備生產(chǎn)商進(jìn)行各個部件的檢測和調(diào)試,以及設(shè)備出廠參數(shù)的設(shè)置。

圖7 手動劃切功能
4 小 結(jié)
系統(tǒng)設(shè)計中采用動態(tài)庫和模塊化設(shè)計使得程序設(shè)計思路清晰,調(diào)試過程中容易發(fā)現(xiàn)問題。引入“二次封裝”的概念使得項目在開始代碼編寫的過程中可以脫離硬件,且后期設(shè)備改進(jìn)和維護(hù)過程中更換硬件后方便程序修改。人機(jī)交互界面脫離運(yùn)動邏輯功能更方便了軟件的靈活性。
[1]謝新華.軟件架構(gòu)設(shè)計的思想與模式[DB/OL].http://www.TCICT.cn.2012-2-3/2012-05-06.
[2]齊舒創(chuàng)作室.VisualC++6.0用戶界面制作技術(shù)與應(yīng)用實例[M].北京:中國水利水電出版社,1999.
[3]駱斌,費翔林.多線程技術(shù)的研究與應(yīng)用[J].計算機(jī)研究與發(fā)展,2000(4):407-412.
[4]吳劍強(qiáng),榮岡.先進(jìn)控制軟件集成實時數(shù)據(jù)平臺的分析與設(shè)計[J].計算機(jī)應(yīng)用研究,2004,21(12):53-55.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
濰坊學(xué)院學(xué)報(2016年2期)2016-12-01 13:00:11
軟件導(dǎo)刊(2016年9期)2016-11-07 21:35:42
通信電源技術(shù)(2016年5期)2016-03-22 01:09:49
石油知識(2016年2期)2016-02-28 16:20:16
新聞傳播(2015年11期)2015-07-18 11:15:04
自動化儀表(2015年11期)2015-04-01 01:02:40