同步軌道衛星四站時差統計定軌精度分析
2012-03-18 08:09:34彭華峰
電訊技術 2012年5期
關鍵詞:測量
彭華峰,鄭 超,張 韜
(1.盲信號處理重點實驗室,成都610041;2.西南電子電信技術研究所, 成都610041)
1 引 言
地球同步軌道(GEO)衛星的精密測定軌一直是精密測定軌領域的研究難點和熱點問題,是確保高精度衛星導航、定位等的基礎[1]。有源精密測距定軌方法是目前主要的精密測軌手段之一,其測軌精度可達厘米級水平[2]。光學測軌是同步衛星的主要無源測軌方式,但是容易受天氣等因素影響。
基于同步衛星通信信號四站時差測量的同步衛星無源測軌方法,通過1 個中心站和3 個副站同時接收衛星通信信號,并將副站采集數據傳輸給主站求取時差后實現對衛星測軌。該方法具有測軌精度較高、軌道和信號直接關聯等特點,為無源測軌提供了一種新的解決思路。
目前,基于四站時差測量的定位技術已經開展了相關研究,主要側重在定位算法研究、定位精度分析以及優化布站等方面[3-7]。將四站時差定位技術應用于同步軌道衛星測軌則未見報導。因此,本文開展四站時差定位技術進行同步衛星測軌的研究,分析其統計定軌精度,對推進四站時差測軌技術的應用具有重要的指導意義。
2 四站時差無源測軌
2.1 測量原理
四站時差無源測軌是在衛星同一波束范圍內的4 個測軌參考站同時接收衛星發射的同一寬帶BPSK 或QPSK 通信信號。主站把接收到的信號進行解調,將解調后得到的隱含有發射時間信息的序列碼及接收時間信息通過通信網絡發送給各個副站,副站利用接收到的主站序列碼與自己接收解調后的序列碼進行相關比對,找到同源序列碼及該信號到各副站的接收時間信息,這樣就可以解算出衛星同源信號到達主站與3 個副站之間的時間差,從而實現對同步衛星的精確測軌。這種測軌技術有測量精度高、能全天候工作等特點。該方法的測軌原理如圖1 所示。

圖1 四站時差無源測軌原理示意圖Fig.1 Principle figure of orbit measurement with four-station′s time difference of arrival
2.2 系統組成
同步衛星四站時差測軌系統基本組成如圖2 所示,主要包括4 個接收站和1 個監控與數據處理中心。各站數據接收與采集系統主要由天伺饋系統、測軌ODU、中頻矩陣和時間系統4 部分組成。

圖2 四站時差無源測軌系統組成框圖Fig.2 System composition of orbit measurement with four-station′s time-difference of arrival
3 統計定軌原理
3.1 動力學模型
在慣性坐標系中,應用牛頓第二定律可得人造地球衛星的運動方程如下:

式中,fTB為二體問題作用力(見文獻[3-5] ,下同);f NS為地球非球形攝動力,采用JGM 3 模型;f NB為三體攝動作用力,采用JPL 的DE200 行星星歷進行計算;f TD為固體潮攝動引力,同樣采用JPL 的DE200行星星歷進行計算;f SP為太陽光壓攝動引力。
3.2 測量模型
假設衛星位置為Rs= xs,ys,zsT,4 個觀測站的坐標分別為Ri= xi,yi,zi, i=0,1,2,3,其中0表示主站,其他表示副站。測量數據中通常還至少包含地面站傳輸線時延等系統誤差,這些誤差在定軌時段內可認為是較穩定的未知常值,可以在定軌同時進行估計得到,這個常值用系統誤差s i(i =1,2,3)描述。則觀測方程為

式中,li(i =0,1, …,3)為衛星到觀測站的斜距,表達式為

觀測向量對衛星位置向量的偏導數為

式中, uTi(i=0,1,2,3)為單位向量,表達式為

觀測向量對系統誤差的偏導數為

式中,hi中第i 個元素值為1,其他元素值為0。
3.3 迭代加權最小二乘統計定軌算法[8-11]
從前面的論述中可知,待估參數包括t 0時刻衛星的狀態、系統誤差等共9 個參數,用向量X0=[ x0,y0,z0,﹒x0,﹒y 0,﹒z0, s1, s2, s3]T表示。同時, 將衛星運動方程和觀測方程進行線性化可得

令yi表示i 時刻的觀測數據,對應的偏導數向量為Hi,權系數為wi=R-1i,則總的觀測向量為y =[y1,y2, …,yn] ,權矩陣表示為W=diag(w1,w2, …,wn),偏導數矩陣為H=[ H1,H2, …,Hn]T,則方程為

則加權最小二乘的最佳估值為

通過上式估值后修正初始狀態進行迭代,直至收斂:

當存在系統誤差時,可以采用自校準方法進行估計,此時測量方程可表示為

式中, G 為單位矩陣,b0為系統誤差向量,此時方程可轉化為

式中, H′=[ H G] , X0=[ x0b0]T,方程同樣通過加權最小二乘迭代估計得到衛星狀態及系統誤差的估計。
4 測軌精度仿真分析
4.1 仿真條件
本文采用通過Monte -Carlo 仿真方法,開展對同步軌道衛星四站時差測軌進行仿真分析。通過衛星真實星歷模擬計算真實時差測量數據,然后對真實測量數據加入噪聲方差為3 m即10 ns的高斯白噪聲。3 m的噪聲方差代表了目前所能夠達到的較好的時間同步精度和測量精度水平。將仿真數據進行統計定軌后得到衛星狀態估計,將其與真實星歷進行比較后得到定軌誤差。為比較定軌結果噪聲方差分布,將上述模擬過程進行100 次Monte-Carlo 仿真,最后用100 次Monte-Carlo 定軌結果的統計方差評價定軌精度。100 次Monte-Carlo 定軌結果已經能夠基本反映統計定軌的誤差方差分布。定軌算法采用迭代加權最小二乘統計定軌算法,并忽略模型誤差的影響。軌道計算、數據模擬及統計定軌算法均采用C#語言開發。仿真所用觀測站主站位于華東地區,其余3 個副站分別位于東北、華北和華南地區。定軌弧長為1 天,測量間隔為1 min。
4.2 無系統誤差時的定軌精度
通過計算機100 次Monte-Carlo 仿真得到的位置誤差和速度誤差如圖3 所示,圖中直線對應定軌誤差的統計方差。從圖中可以看出,當無系統誤差時,統計定軌位置誤差約為11 m, 速度誤差約為1 mm/s。圖4 給出了預報一周的位置和速度誤差。從圖中可以看出,預報一周后,位置誤差約100 m,速度誤差約8 mm/s。以上仿真結果證明四站時差測軌可以獲得較高的定軌精度和預報精度。
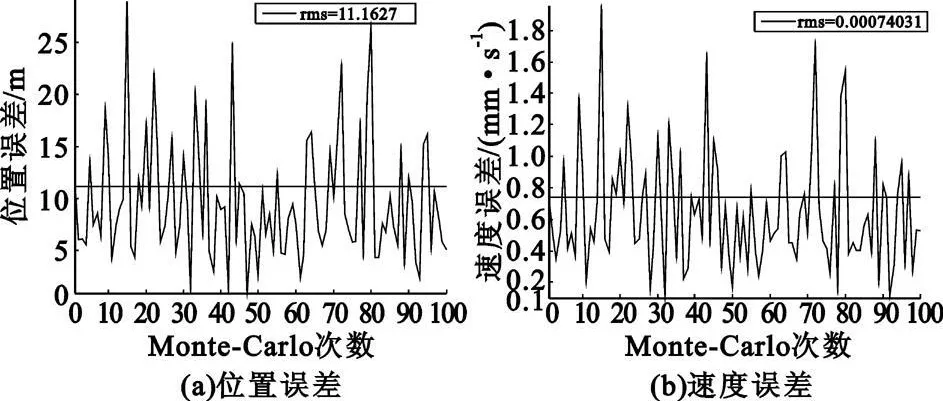
圖3 無系統誤差時100 次Monte-Carlo 統計定軌誤差Fig.3 The accuracy of 100 times Monte-Carlo orbit determination without system error

圖4 無系統誤差時預報1 周的誤差Fig.4 The accuracy of 1-week prediction without system error
4.3 估計系統誤差時的定軌精度
通過計算機100 次Monte-Carlo 仿真得到的狀態誤差和系統誤差分別如圖5 和圖6 所示,圖中直線對應定軌誤差的統計方差。圖7 為預報一周的位置和速度誤差。

圖5 估計系統誤差時100 次Monte-Carlo 定軌誤差Fig.5 The position accuracy of 100 times Monte-Carlo orbit determination with system-error estimated

圖6 估計系統誤差時100 次Monte-Carlo 定軌結果系統誤差估計偏差Fig.6 The system-error accuracy of 100 times Monte-Carlo orbit determination with system-error estimated

圖7 估計系統誤差時預報1 周的軌道誤差Fig.7 The orbit accuracy of 1-week prediction with system-error estimated
從圖中可以看出,當有系統誤差時,可以通過自校準方法估計系統誤差,系統誤差估計精度約為4 m/s。此時,統計定軌誤差相對較大,位置誤差約為120 m,速度誤差約為9 mm/s,預報1 周的位置誤差約為200 m,速度誤差約為15 mm/s。證明存在系統誤差時,仍然可以獲得較高的定軌精度和預報精度。
比較有系統誤差和無系統誤差時的定軌結果可知,測量系統應該盡可能地消除系統誤差,以便進一步提高定軌精度。
5 結 論
本文介紹了基于同步衛星信號四站時差測量的無源測軌原理,給出了該系統的基本組成,提出了基于四站時差的同步衛星自校準定軌方法。通過Monte-Carlo 仿真,重點對同步衛星的統計定軌精度進行了分析。仿真結果表明,當無系統誤差時,統計定軌精度可達到11 m,1 周的預報精度約為100 m;當存在系統誤差時,可通過自校準方法進行同步估計系統誤差,此時定軌精度可達到120 m,1 周的預報精度約為200 m。
值得指出的是,四站時差測軌的站址布局對定軌精度影響較大,可視區內的不同衛星定軌精度可能存在較大差異,具體應用中要針對具體衛星和站址幾何進行分析。有關站址幾何對四站時差測軌精度影響的詳細分析將另文討論。
[1] 郭睿, 劉雁語, 譚紅力, 等.基于自發自收測距的GEO衛星精密定軌[ J] .測繪科學技術學報, 2009, 26(5):333-336.
GUO Rui, LIU Yan-yu, TAN Hong-li, et al.Analysis 0f GEO Satellite Precise Orbit Determination Based on Self-Sending and Self-Receiving Ranging Data[ J] .Journal of Geomatics Science and Technology,2009, 26(5):333-336.(in Chinese)
[2] 李志剛,楊旭海,施滸立,等.轉發器式衛星軌道測定新方法[ J] .中國科學G 輯,2008,38(12):1711-1722.
LI Zhi-gang, YANG Xu-hai, SHI Hu-li, et al.New Method of Satellite Orbit Survey with Transfer[ J] .Scientia Sinica(Series G),2008, 38(12):1711-1722.(in Chinese)
[3] 李建軍.四星時差定位算法研究[ J] .電子對抗技術,2004,19(4):3-6.
LI Jian-jun.Research of Location Algorithm on TDOA With Four Satellites[ J] .Electronic Countermeasurement Technology,2004,19(4):3-6.(in Chinese)
[ 4] 俞志強.四站時差定位精度分析[J] .空軍雷達學院學報,2010, 24(6):400-402.
YU Zhi-qiang.Analysis of 4-Station TDOA Location Accuracy[ J] .The Academic Journal of the College of Air Force,2010, 24(6):400-402.(in Chinese)
[ 5] 張政超, 童力.四站時差無源定位精度分析[J] .中國電子科學研究院學報, 2010,5(6):582-585.
ZHANG Zheng-chao, TONG Li.Precision Analysis of Passive Location of 4-stations Based on TDOA[ J] .Journal of China Academy of Electronics and Information Technology,2010,5(6):582-585.(in Chinese)
[ 6] 俞志強,王宏遠, 武文.四站時差定位布站研究[J] .電子學報,2005, 33(12A):2308-2311.
YU Zhi-qiang, WANG Hong-yuan, WU Wen.4-Station Disposition Research of Position Location Using TDOA[J] .ACTA Electronica Sinica,2005,33(12A):2308-2311.(in Chinese)
[ 7] 俞志強, 葉朝謀.四站三維時差定位模糊分析[ J] .空軍雷達學院學報,2009, 23(5):370-372.
YU Zhi-qiang, YE Chao-mou.Analysis of Ambiguity of 4-Station 3D TDOA Positioning[ J] .Joumal of Air Force Radar Academy,2009, 23(5):370-372.(in Chinese)
[ 8] 李濟生.人造衛星精密軌道確定[M] .北京:解放軍出版社,1995.
LI Ji-sheng.The satellite precision orbit determination[M] .Beijing:PLA Press,1995.(in Chinese)
[ 9] 湯錫生,陳貽迎, 朱民才.載人飛船軌道確定和返回控制[M] .北京:國防工業出版社, 2002.
TANG Xi-sheng,CHEN Yi-ying, ZHU Min-cai.Manned spacecraft orbit determination and return control[M] .Beijing:National Defense Industry Press, 2002.(in Chinese)
[ 10] 王威,于志堅.航天器軌道確定——模型與算法[M] .北京:國防工業出版社,2007.
WANG Wei,YU Zhi-jian.Spacecraft Orbit Confirm:Modeling and Algorithm [M] .Beijing:National Defense Industry Press, 2007.(in Chinese)
[11] 周慶勇, 杜蘭, 藍朝楨.基于高軌光學監視平臺的定軌精度分析[ J] .光電工程, 2010,37(9):80-85.
ZHOU Qing-yong, DU Lan, LAN Chao-zhen.Analysis of of the Orbit Determination Accuracy for Space Objects Based on High-Orbit Surveillance Platform[J] .Opto-Electronic Engineering,2010,37(9):80-85.(in Chinese)
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
