一種基于紅外傳感器的無人機姿態測量方法
2012-03-17 07:21:12吳成富馬松輝
電子設計工程 2012年17期
吳成富,馮 喆,馬松輝
(西北工業大學 無人機重點實驗室,陜西 西安 710065)
無人機的姿態角是無人機穩定控制與導航的最基本與最重要的參數之一。傳統的姿態測量方法主要采用慣性導航系統,利用陀螺儀和加速度計等慣性器件對姿態角進行測量。但陀螺儀在長時間工作時,會出現較大的累計誤差,因此利用這些傳感器測得的飛行姿態較難實時反映微小飛行器空中的高動態運動狀況[1]。同時,無人機的發展趨于微小型化,要求采用體積小、成本低并滿足任務要求的姿態測量裝置。
文中提出的用紅外傳感器測量姿態角的方法,運算速度快,準確性較高,可以用于飛行器實時姿態測量。具有非接觸、全場測量和無漂移等特點,且動態品質好,不存在累計誤差;另外相比傳統的姿態測量裝置,成本較低,體積較小,重量較輕,功耗低,適合于長時間的飛行任務;且紅外線的環境不受光照程度的影響,安裝了紅外傳感器的無人機可以在夜間飛行。
1 紅外傳感器姿態測量原理
紅外溫度傳感器由熱吸收區(熱端)、硅基片(冷端)及外封裝組成,它的工作原理是基于熱電偶原理,即通過吸收天空和地面輻射的紅外線能量,輸出一個與溫度成比例關系的電壓信號[2]。
利用紅外溫度傳感器測量姿態的主要原理是根據地面和天空的溫度差值來估計無人機的傾斜角度。一般情況下,天空的溫度比地面的溫度低。將兩個紅外溫度傳感器反方向對稱放置在同一軸線上,當兩個紅外傳感器水平時,所感受到的天空與地面的溫度相同,則兩個紅外傳感器的輸出電壓值相同,電壓差值即為零。當紅外傳感器發生傾斜時,朝向天空一端的傳感器感受到的溫度比朝向地面一端的傳感器感受到的溫度低,兩端傳感器的輸出電壓則會發生變化。輸出電壓隨無人機傾斜角度的變化而變化,即可計算出傾斜角度大小。根據這一原理,兩個對稱的紅外溫度傳感器即構成了單軸無人機姿態測量系統。
用于無人機姿態測量的紅外傳感器為紅外溫度傳感器。
2 三軸紅外傳感器
基于上述原理,且考慮到紅外傳感器自身視場角的限制,文中將三對紅外傳感器按兩兩組合的方式正交安裝,以實現對無人機的姿態測量。為了便于安裝,本文選擇的紅外傳感器為FMA Direct Co-Pilot飛行增穩系統中的水平傳感器和垂直傳感器,如圖1所示,其視場角為90°[3]。FMA Direct Co-Pilot是利用紅外線輻射檢測天地之間溫度差來使飛機穩定飛行的儀器,澳大利亞Monash大學飛行器研究小組等多家單位已對其性能進行了驗證[4]。
圖1 FMA Direct紅外傳感器Fig.1 FMA Direct infrared sensor
水平傳感器有兩個相互垂直的通道,垂直傳感器有一個通道,每個通道由兩個反方向對稱放置的紅外傳感器構成。水平傳感器安裝在飛機機頭下方,為了獲得更好的視場角,使其與機頭機尾中心軸線成45°安裝。垂直傳感器可裝置于飛機任意位置,當飛機水平時保持垂直即可,具體安裝方式如圖2所示。傳感器的3個通道構成X軸Y軸Z軸,即為正交的三軸紅外傳感器測量裝置,Z軸與機體坐標軸Zb重合,X軸Y軸與機體坐標軸Xb,Yb軸夾角均為45°。

圖2 紅外傳感器在無人機上的安裝方式Fig.2 IR sensors on UAV
3 無人機姿態角解算
3.1 傳感器性能測試
為了獲得紅外傳感器的輸出電壓與對地傾斜角度之間的函數關系,本文采用系統辨識的方法確立紅外傳感器的輸出與輸入模型,即通過實驗來觀測系統的輸入與輸出,從而確定系統的模型。
所用到的實驗設備為一臺單軸小轉臺,一塊DSP數據采集板,FMA Direct水平紅外傳感器。由于紅外傳感器視場角內不能出現熱源干擾,所以選擇在開闊的場地進行實驗。
將水平紅外傳感器固定于轉臺上,從-90°到90°,以通道2方向為軸線,每次將轉臺旋轉10°,記錄下通道1方向紅外傳感器的對地傾角和通道1通道2的輸出電壓,分別在不同氣溫環境下進行實驗。以傾斜角度-90~90為橫坐標,以輸出電壓為縱坐標,根據所得數據,畫出散點圖,并進行曲線擬合,得到曲線如圖3所示。其中圖3(a)為氣溫22°,天氣多云的情況下通道1所得曲線。圖3(b)為氣溫18°,天氣陰的情況下通道1所得曲線。圖3(c)為氣溫3°,天氣陰的情況下通道1所得曲線。圖3(d)為氣溫22°,通道2的輸出信號散點圖。
觀察圖3(d),通道2的兩個紅外傳感器始終水平,所以輸出電壓保持不變,近似為一條直線。 圖 3(a)(b)(c)中 3 種氣溫環境下的擬合曲線基本一致,根據以上擬合曲線可以得到紅外傳感器輸入與輸出之間的函數關系:
V=Vhsin(Kφ)+Vb(1)
其中V為輸出電壓,φ為紅外傳感器對地傾角,Vb為偏置電壓,Vh為最大偏差電壓。當紅外傳感器水平時,兩端檢測到的溫度相同,理論上輸出電壓為零,但實際電路中存在偏置電壓,即為Vb。紅外傳感器垂直時的輸出電壓為最大電壓,最大電壓與Vb之間的偏差即為最大偏差電壓Vh,紅外傳感器正向垂直與負向垂直的輸出值不同,取其平均值即得到Vh。

觀察相同溫度下的兩組曲線,發現傾角為10°時,兩組數據一致性較好,說明此時所測的輸出電壓誤差最小,則選取傾角為10°時的輸出電壓計算K值。表1給出了多次實驗測得的具體數據。
根據表1所示數據,K的值不受溫度和環境的影響,對上表中多次實驗所得的K取平均值,得K=1.26。而由于不同的地面環境及天氣狀況會使紅外線產生一定的偏差,所以在飛行前需要對紅外傳感器特性進行場地校正,具體方法是:在試飛前,將紅外傳感器水平放置,輸出電壓即為Vb。將紅外傳感器正向垂直放置,即對地傾角為90°,記錄下輸出電壓的最大值Vmax,將紅外傳感器反向垂直放置,即對地傾角為-90°,記錄下輸出電壓的最小值Vmin,由此可得到Vh的值。在實際應用中,可在飛機的滑跑階段,記錄下水平傳感器的輸出即為Vb,垂直傳感器的輸出即為Vmax。
綜上可推導出根據紅外傳感器的輸出電壓計算紅外傳感器對地傾角的經驗公式:
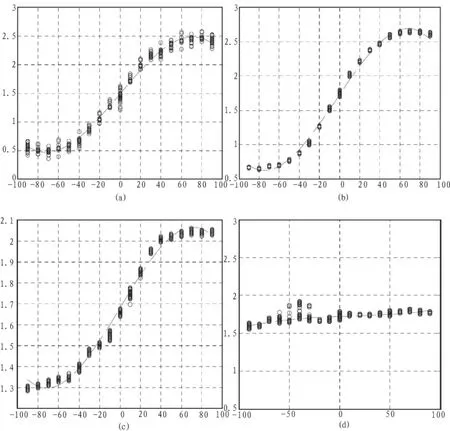
圖3 實驗數據擬合曲線圖Fig.3 Fitting curve of test data

表1 紅外傳感器測試數據Tab.1 Test data of infrared sensor
3.2 姿態角解算
紅外傳感器測量的 3個角度φx,φy,φz分別是3對紅外傳感器相對于地面的夾角,而無人機姿態角是在機體坐標系下定義的,在實際使用中需要利用方向余弦矩陣(DCM)進行轉換[5]。由地面坐標系到機體坐標系的DCM如下所示:

根據DCM,可以將紅外傳感器的對地傾角轉化成無人機的姿態角。
當水平傳感器傾斜45°安裝,且俯仰角為θ和滾轉角為?時,3對紅外傳感器的對地傾角φx,φy,φz的計算公式如下:

綜合式(3),(4)可得,無人機姿態角的解算公式為:

由于俯仰角定義在(-90,90)區間,與反正切函數主值在同一個區間,不存在多值問題,而滾轉角定義在(-180,180)區間,會存在多值問題。
根據Z軸的輸出,可以判斷無人機姿態角所處的象限。當 Uz大于 Vb時,滾轉角在(-90, 90)區間。
當 Uz小于 Vb時,有 Uz-Vb<0,即 Vhsin(Kφz)=Vhsin(K cos?cosθ)<0,因為俯仰角定義在(-90,90)區間,所以 cosθ>0,則 cos?<0,從而得到滾轉角在(-180,-90)區間和(90,180)區間。
當 ? 在(-180,-90)區間時,輸出的主值大于 0,?=輸出的主值-π
當 ? 在(90,180)區間時,輸出的主值小于 0,?=輸出的主值+π
通過以上計算流程可以實現俯仰角:-90°~90°,滾轉角:-180°~180°的測量。
4 太陽干擾
某些情況下,太陽輻射可能進入紅外視場。在紅外傳感器工作的光譜波段,太陽輻射功率比地球輻射功率大300倍以上,這極大的干擾了傳感器的正常工作[6]。因此,在紅外傳感器測量姿態角的算法中,必須考慮到太陽干擾問題,以確保姿態信息準確輸出。
文中通過場地實驗對太陽干擾的情況進行了驗證。圖4為正午12點太陽位于正上方時,紅外傳感器的輸入輸出特性散點圖及擬合曲線。

圖4 太陽干擾下的紅外傳感器輸出散點圖Fig.4 Infrared sensor output scatter plots under the sun interference
觀察圖 4 所示曲線, 在對地傾角為 (-90°~-50°),(30°~90°)的區間內,輸出電壓分別為紅外傳感器所能輸出電壓的最小值0 V和最大值2.999 V。而在其他角度范圍內,由于沒有太陽輻射進入紅外傳感器的視場角,對紅外傳感器無干擾,輸出曲線與無干擾情況下近似一致。由此可見,太陽信號進入紅外視場后,紅外傳感器將輸出遠高于正常紅外信號的輸出電壓。
根據以上實驗,本文采用閾值法來消除太陽干擾。根據公式(1),V=Vhsin(Kφ)+Vb,則 V 的最大值為 Vh+Vb,V 的最小值為Vb-Vh。當紅外傳感器某一通道的輸出電壓超出這一范圍時,則認為這一通道被太陽輻射干擾,對這一通道的輸出忽略不計,根據剩余兩通道的輸出值解算無人機的姿態角。
以Z軸被太陽輻射干擾為例,假設Z軸的輸出電壓Uz超過閾值,則忽略Z軸的輸出電壓,根據X、Y軸的輸出計算飛機的姿態角,公式如下所示:

5 機載飛行實驗
為了驗證以上算法,將水平紅外傳感器和垂直紅外傳感器分別安裝于小型固定翼無人機上進行機載飛行實驗。實驗時氣溫30°,太陽位于天空東南方向。實驗輸出曲線如圖5所示,圖中實線為俯仰角,虛線為滾轉角。
圖5(a)為俯仰運動曲線,滾轉角始終保持在零值附近,當飛機姿態發生大角度變換時,會產生一定的偏移,但當飛機姿態穩定時,能迅速回歸零值。飛機在A段做水平直線飛行,俯仰角在零值附近震蕩。A段之后飛機開始向上俯仰飛行,到B段俯仰角接近50°。B段之后飛機開始向下俯仰,到C段飛機俯仰角為45°。C段之后飛機迅速恢復水平,這時俯仰角與滾轉角均產生較大的震蕩。D段飛機繼續做水平直線運動。
圖5(b)為滾轉運動曲線,俯仰角始終保持在零值附近。飛機在A段做水平直線飛行,滾轉角在零值附近震蕩。B段飛機開始向左滾轉,滾轉角逐漸減小至-60°。C段飛機保持在滾轉角-60°。D段飛機開始向右滾轉,滾轉角逐漸增大。E段飛機平飛,滾轉角為0°。

圖5 機載飛行時輸出的姿態角曲線圖Fig.5 Airborne flight attitude angle curve
如圖5曲線所示,飛機在做水平直線飛行時,俯仰角與滾轉角均保持在零值附近,誤差在3°左右。飛機向左滾轉60°時,滾轉角保持在-60°附近,俯仰角保持在0°附近,誤差在2°左右。只有剛上電時及飛機發生大幅度姿態變化時,姿態角會產生較大的震蕩,其余狀態下誤差均在允許范圍之內。且天空中的太陽干擾對實驗結果并無影響,說明此算法可以很好的避免太陽輻射干擾。
6 結 論
文中將紅外傳感器應用于無人機姿態角測量,通過對紅外傳感器特性的場地測試,對各個參數進行標定,利用系統辨識法建立其輸入輸出模型;再進行不同坐標系之間的角度變換;同時考慮到太陽輻射干擾,用閾值法對干擾進行消除。機載飛行實驗的結果表明,即使天空中存在較強太陽輻射干擾,通過本文研究的算法解算的姿態角依然可以較好的反映無人機飛行過程中的姿態信息,準確度較高。并且紅外傳感度成本低,體積小,安裝方便,可以廣泛應用于無人機姿態測量系統中。進一步的工作是引入Kalman濾波,以提高姿態角的測量精度,能更好的獲得無人機的姿態信息。
[1]蔡瑜,葉雄英,朱榮,等.用于微小飛行器姿態測量的紅外地平儀研制[J].儀表技術與傳感器,2009(7):33-35.
CAIYu, YE Xiong-ying,ZHU Rong,et al.Infrared horizon detector making for measuring micro air vehicle attitude[J].Instrument Technique and Sensor,2009(7):33-35.
[2]張鵬翼,羅衛兵,樓超英.紅外傳感器在無人機姿態平衡系統中的應用[J].電光與控制,2007,14(6):170-172.
ZHANG Peng-yi,LUOWei-bing,LOU Chao-ying.Application of infrared sensor in attitude balance system of UAV[J].Electronics Optics & Control,2007,14(6):170-172.
[3]Taylor B,Bil C,Watkins S.Horizon sensing attitude stabilization:A VMC Autopilot[C]//Presented to the 18th International UAV Systems Conference.Bristol,UK,2003.
[4]DI Long,CGAO Hai-yang,CHEN Yang-quan.A two-stage calibration method for low-cost UAV attitude estimation using infrared sensor[J].IEEE.2010(6):137-142.
[5]張明廉.飛行控制系統[M].北京:航空工業出版社,1993.
[6]夏項團,劉學明,王建宇,等.紅外地平儀視場保護系統[J].光學精密工程,2007,15(4):512-516.
XIA Xiang-tuan,LIU Xue-ming,WANG Jian-yu, et al.Covering system for vision field of infrared earth sensor[J].Optics and Precision Engineering,2007,15(4):512-516.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年11期)2019-06-24 03:40:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
發明與創新(2016年38期)2016-08-22 03:02:52
