基于RFID技術的多標簽定位系統設計*
2012-03-15 07:50:18張穎李凱
電子技術應用 2012年8期
張穎,李凱
(上海海事大學 信息工程學院,上海 201306)
定位技術是一種應用廣泛的高科技技術。目前常見的定位技術主要有GPS衛星定位、紅外定位、超聲波定位、WiFi網絡定位、GPRS/CDMA移動通訊技術定位等,但是受定位時間、定位精度以及復雜室內環境等條件的限制,并考慮到精度、成本、可行性等因素,這些方法都存在一定的局限性,尤其是在一些室內和屏蔽物遮擋的局域定位的場合。無線射頻識別RFID(Radio Frequency Identification)定位技術以其非接觸、高靈敏度和低成本等優點,在許多場合下成為一種重要技術選擇,受到越來越多的關注。
因RFID定位系統涉及多標簽識別的問題,系統必然會出現多個標簽同時與讀寫器通信產生信號碰撞的情況。目前RFID多標簽防碰撞算法有多種:多址技術、ALOHA防碰撞算法、二進制防碰撞算法等。多址防碰撞算法是以增加系統的復雜性和提高成本為代價,且有無法克服的缺陷;ALOHA防碰撞算法有時會導致讀寫器出現錯誤判斷,對某個標簽是否在讀寫范圍內產生誤判,同時還存在沖突概率較大的問題;簡單的二進制防碰撞算法有時并不能取得很好的避碰效果。本文采用基于序列號對時隙數運算的排序算法,該算法可以克服誤判問題,且易于實現、效率高,不受標簽數量的限制。RFID定位算法有:LANDMARC、基于信號達到角度的定位法(AOA)圓周定位算法等[3-4]。這里采用圓周定位算法,該方法簡單可靠,易于在線實施。
1 硬件系統設計概述
本系統主要由讀寫器和有源標簽組成。讀寫器與標簽之間的射頻信號通過空間耦合實現無接觸信息傳遞,讀寫器通過與標簽的無線通信獲得接收信號強度指示(RSSI)值[5],這是對待定位標簽進行位置計算的重要參數。微控制器PIC16F877A控制CC2500射頻收發模塊的數據發送與接收[6-7]。讀寫器網關節點可通過RS232接口與上位機相連。系統結構如圖1所示。
系統控制器采用Microchip公司的8 bit高性價比微控制器PIC16F877A作為主控芯片,它在架構上采用哈佛總線結構,數據總線與指令總線分離,便于實現全部指令的單字節化、單周期化,從而有利于提高CPU執行指令的速度。此外,片上數據存儲空間比較大,可以方便通信協議棧的設計與實現。內部看門狗定時器,提高了程序執行的穩定性;低功耗休眠模式,大大降低了系統的功耗。它具有驅動能力強、外接電路簡潔、功耗低等特點。因此適合作為RFID讀寫器的控制器來使用。

射頻收發器選用德州儀器公司的CC2500[7-8]作為控制芯片,CC2500集成了一個數據傳輸可達500 kb/s的高度可配置的調制解調器,大大加強了數據傳輸的性能,同時通過開啟集成在調制解調器上的前向誤差校正選項,使性能得到大幅度提升。MCU通過SPI接口向CC2500發送操作命令,配置其調制方式、工作頻率等參數,通過指令將其配置為接收狀態、發送狀態、空閑狀態或休眠狀態。CC2500的引腳SO和SI分別為數據傳輸的輸出和輸入信號線,CSN為片選信號引腳,SCLK為時鐘信號引腳。當其接收到一個數據或發送完一個數據時,都會通過引腳GDO0和GDO2輸出相應的狀態脈沖,MCU據此來判斷CC2500的狀態。
2 多標簽識別防碰撞算法設計
基于序列號對時隙數運算的排序算法[8]是時分復用方法的一種,具有易于實現、執行效率高等特點。利用PIC16F877A通過SPI接口來控制CC2500數據的發送時隙,將標簽作為應答器,基于序列號對時隙數運算的排序算法的實現流程如下:在爭用周期內,首先用標簽序列號除以爭用周期時隙數所得的余數來確定標簽在爭用數據幀內的發送時隙;然后用標簽序列號除以爭用周期時隙數所得的商確定標簽在爭用幀內相應時隙的發送位,然后在爭用周期內發送的爭用數據幀的相應時隙發送位填充數據“1”;最后利用填充過的爭用數據幀確定標簽在整個數據發送周期內的發送順序 (即標簽的發送順序 =其發送位及其前面各發送位中 “1”的總數),從而給不同序列號的標簽分配不同的發送時序。例如采用9個待定位標簽,利用上述算法進行標簽識別排序,具體流程如圖2所示。
圖2倒數第二行為9個標簽的發送時序,發送的時序是 A0,A4,A8,A1,A5,A2,A6,A3,A7。
設標簽序列號長度為 LID(序列號以二進制形式表示),標簽 j的序列號為 Ij,標簽數量為 M(M≤2LID),信道爭用開始指令的發送時間為T0,休眠指令的發送時間為T1,數據發送周期的數據幀長度為T;爭用周期的時隙數為MTS(MTS2≥2LID),時隙長度為 t(設每個時隙內的發送數據長度為 MTS位,位時間長度為 tb,即 t=MTStb),時隙 i內有Pi個標簽要發送數據;標簽j在爭用周期內的發送時隙為 Sj,發送位為 Dj,序列號對 MTS的商為 Qj,標簽 j在整個數據發送周期中的發送順序為 Tj,則Sj=Ij%MTS,Qj=Ij%MTS,,Qj=Ij/MTS,Pi=爭用數據幀中的 i時隙內 1的個數,Tj與Pi的關系和系統效率E表達式如下:

對于時隙數固定的系統而言,當M較少時,E會隨著M的增加而快速增加;當應答器數目較多時,E會隨著M的增大而緩慢增大;而M接近滿荷時,時隙數對E沒有顯著影響。但是對于同一系統,如果取不同的時隙數,則隨著時隙數的增大,E會有所下降,這是因為時間利用率下降了。只要選取合適的時隙數和應答器數量(即接近于系統滿負荷情況M=(MTS)2,就可以優化系統性能。
3 定位算法設計與實現
本系統采用圓周定位法。它是利用讀寫器接收標簽信號得到RSSI值,通過相關的定位計算公式來進行定位的一種方法。

無線信號的接收信號強度與信號傳輸距離的關系可以用式(3)表示,其中RSSI是接收信號的強度,d是收發節點之間的距離,n是信號傳播因子,EAF是環境因子。

由式(3)可以看出,射頻參數A和n用于描述通信操作環境,它們決定了接收信號強度和信號傳輸距離的關系。射頻參數A被定義為dBm,表示距發射機1 m時接收到信號平均能量的絕對值,如平均接收能量是-10 dBm,則定義參數A為10。射頻參數n表征了信號能量隨著到收發器距離增加而衰減的速率,其數值的大小取決于無線信號傳播的環境。依據式(3)可得到待定位標簽到讀寫器的直線距離。如3個讀寫器的位置已知,分別是p1(x1,y1)、p2(x2,y2)和 p3(x3,y3),則待定位標簽的坐標計算如式(4):

由式(4)可以計算出標簽的坐標位置為:

實驗中將三個讀寫器放在坐標為 (2,2)、(2,4)、(4,4)的位置上,依次對9個待定位標簽進行定位實驗。9個待定位標簽放在4 m×4 m的正方形區域內,相鄰的待定位標簽相互之間相隔2 m,如圖3所示。

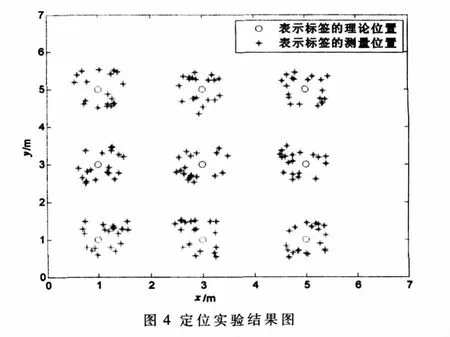
分別對每個標簽到讀寫器的RSSI值測試20次,并記錄其數據,通過上述圓周定位算法對得到的RSSI值進行處理,得到各個待定位標簽的坐標值(這里EAF取13.5,A取 45,n取 3.5)。實驗結果如圖4所示。
圖4中圓圈表示標簽的理論位置,星點表示標簽的定位位置,每一個標簽定位實驗20次。從圖中可以看出,每個區域的20個星點都圍繞在圓圈附近,說明定位位置相比于理論位置存在定位誤差。分別對9個標簽點的20次定位測試結果進行均方差統計,均方差的范圍為 0.236~0.541。
基于低功耗微控制器PIC16F877A和射頻收發器CC2500構造的RFID局域定位系統具有結構簡單、成本和功耗較低、可擴展性好、適應性強、易于實施等特點。利用基于序列號對時隙數運算的排序算法解決了多標簽識別的防碰撞問題;利用圓周定位算法對待定位標簽進行局域定位。實際測試表明該設計方法能夠通過對多標簽信號的識別有效實現無線局域定位的功能。
[1]BONUCCELLI M A,LONETTI F,MARTELLI F.Instant collision resolution for tag identification in RFID networks[J].Ad Hoc Networks,2007(5):1220-1230.
[2]SHIH D H,Sun Poling,YEN D C,et al.Taxonomy and survey of RFID anti-collision protocols,Computer Communications,2006(29):2150-2166.
[3]CHOI J,LEE W,Comparative evaluation of probabilistic and deterministic tag anti-collision protocols for RFID networks[J].Lecture Notes in Computer Science,2007(4809):538-549.
[4]NI L M,LIU Y H,LAU Y C,et al.LANDMARC:Indoor location sensing using active RFID,proceedings of the First IEEE international conference[C].Washingtion DC:IEEE Computer Society,2003:407-415.
[5]AWAD A,FRUNZKE T,DRESSLER F.Adaptive distance estimation and localization in WSN using RSSI measures[C].10th Euromicro Conference on Digital System Design Architectures,Methods and Tools,DSD 2007,29-31:471-478.
[6]Microchip.PIC16F87XA Data Sheet[R].2003.
[7]Texas Instruments.CC2500 Datasheet[R].2007.
[8]劉振文,鄧毅華,彭友斌.基于 CC2500的 2.45 GHz RFID系統設計[D].電子技術應用,2008,34(7):76-78,81.
[9]王曉華,周曉光,孫百生.射頻識別系統中的防碰撞算法設計[D].北京:北京郵電大學,2007.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
