實驗室磁懸浮球系統(tǒng)數(shù)學模型的建立
2012-02-26 11:48:16于建立崔亞君高峰娟
裝備制造技術 2012年2期
于建立,崔亞君,高峰娟
(海軍航空工程學院青島分院,山東 青島 266041)
磁懸浮技術的特點,是利用磁場力將物體懸浮起來,使懸浮體與支撐體之間沒有任何機械接觸的一種新型技術,其具有無噪聲、無磨損、能耗低、壽命長、安全可靠的一系列優(yōu)點,應用到很多領域,如磁浮列車,航天器與電磁炮的磁懸浮發(fā)射、磁浮軸承、磁浮隔振器、磁懸浮飛輪儲能等。
磁懸浮球系統(tǒng)由感測器結(jié)構(gòu)、控制器結(jié)構(gòu)、驅(qū)動器結(jié)構(gòu)三大結(jié)構(gòu)組合而成。感測器是由光敏電阻來控制電流大小,在初始電壓和反饋電壓測得其值;而控制器部分,則由運算得來的數(shù)值,再加以變化,進而驅(qū)動到電磁鐵部分,讓其對球的吸引力增多或者減少。
磁懸浮球系統(tǒng)的實現(xiàn)是把電磁鐵繞組中加入大小一定的電流,這樣就會產(chǎn)生一定的電磁力,通過控制電流的大小,來產(chǎn)生與鋼球自身的重力相平衡的電磁力,鋼球就在空中處于平衡懸浮的狀態(tài),但這種平衡狀態(tài)不穩(wěn)定。原因是電磁力大小,與鋼球和電磁鐵之間的相互距離成反比,稍有干擾,鋼球就會偏離平衡位置。因此需要監(jiān)測鋼球與電磁鐵間的距離y的變化,保證鋼球的受力平衡,從而實現(xiàn)穩(wěn)定閉環(huán)懸浮控制系統(tǒng)(如圖1)。
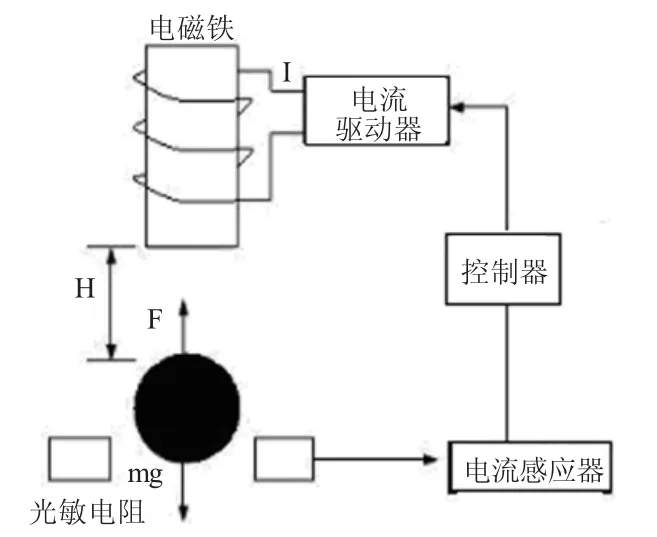
圖1 磁懸浮球控制系統(tǒng)功能圖
1 磁懸浮小球控制系統(tǒng)受力分析
磁懸浮小球的受力分析如圖2所示。

圖2 磁懸浮球受力分析圖
圖中,
規(guī)定向下為坐標正方向;
勵磁電流i;
電磁鐵下端到鋼球的距離(平衡位置處)Y;
重力與電磁力相等的電流(平衡位置處)I;
電磁鐵下端面到鋼球的位移y;
當鋼球受到干擾,偏離平衡位置向下運動時,光電傳感器感受到小球變化的位置信號,同時把信號反饋給控制器,用來增加勵磁電流,使鋼球重新回到平衡位置;相反,當鋼球受到干擾,偏離平衡位置向上運動時,電流被控制器減小,使鋼球保持平衡位置,從而保證鋼球動態(tài)平衡懸浮。
2 動力學模型的推導
磁懸浮小球所受的電磁力做功,與兩個因素有關,就是繞組電流i和小球與電磁鐵的距離y,所以,根據(jù)電磁場能量方程與做功原理,可得電磁力的計算方程為

其中,

將式(2)代入式(1)得
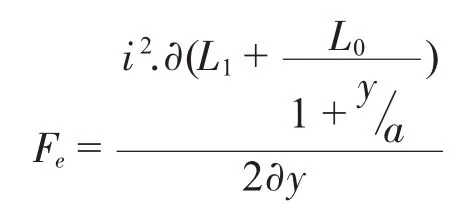
進一步求偏導得到電磁力Fe的表達式

式中y的含義如圖3所示。

圖3 小球部分受力圖
鋼球與電磁鐵端面接觸時的電感L1+L0;
沒有放置鋼球時繞組的電感L1;
a為線圈電感為L1+L0/2時鋼球到電磁鐵的距離。
當電感L=L1+L0/2時,測得鋼球距離電磁鐵的距離a=4.2 mm。
小球的運動方程,根據(jù)牛頓第二定律有

小球平衡時有
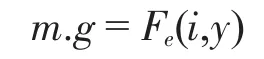
假設鋼球在平衡位置處時滿足
將式(3)代入式(4),則有

即

通過式(5),可以得出結(jié)論:電流 I的大小給定后,鋼球到電磁鐵下端的距離Y也是定值。
令
將式(5)按泰勒級數(shù)展開(在平衡位置處),略去高階項,式(8)為線性化后的方程

為得到鋼球線性化的運動微分方程,將式(6)、式(7)和式(8)代入式(4),

對式(8)兩端進行拉氏變換,得

對上式以電流為輸入,以小球的位移為輸出,這樣就得到了小球運動系統(tǒng)的開環(huán)傳遞函數(shù)

其中

3 相關參數(shù)的選取
參考圖2磁懸浮球受力分析圖,實驗室中選取小球的質(zhì)量m=60 g,平衡位置處 Y=13 mm,平衡時的靜態(tài)電流,即電磁力與鋼球重力相等時的電流,實驗室中這些電流可以通過實驗測量數(shù)值,測量電路圖如圖4。

圖4 測量繞組電感的測量電路
圖4中,E為交流電源,當R'的阻值足夠大時,電磁鐵繞組的電阻可以忽略,則U1和U2的計算表達式
U1=i R',
U2=ω Li。
經(jīng)測量得到
L1=123.6 mH,
L0=8.3 mH,,
靜態(tài)電流I=452 mA.
各個參數(shù)具體取值情況如表1所列。

表1 各參數(shù)取值情況表
將相關參數(shù)取值代入傳遞函數(shù)G(s),就可以得到從線圈電流△i到鋼球位置△y的開環(huán)傳遞函數(shù)

但開環(huán)控制沒有自動修正偏差的能力,抗擾動性較差,一般只應用于對精度要求不高的場合,由運動系統(tǒng)的開環(huán)傳遞函數(shù)G(s)表達式,可以得到磁懸浮小球系統(tǒng)的開環(huán)極點

系統(tǒng)有兩個極點,但S2位于右半平面,系統(tǒng)不穩(wěn)定。鋼球不能處于平衡位置懸浮,為保證鋼球的平衡懸浮,在系統(tǒng)中引入反饋控制。加入反饋后,磁懸浮小球系統(tǒng)結(jié)構(gòu)如圖5。

圖5 磁懸浮小球的系統(tǒng)結(jié)構(gòu)圖
控制器的閉環(huán)傳遞函數(shù)變?yōu)?/p>

對加入單位反饋后的控制器進利用Simulink進行仿真,在階躍信號干擾下,示波器輸出波形如圖6。

圖6 加入單位反饋后控制器抗干擾情況
4 結(jié)束語
從示波器的輸出情況可以看出,在受到干擾情況下,小球仍會偏離平衡位置,但是這個變化是有限度的,逐漸趨于平穩(wěn),但不是在原平衡位置處再次穩(wěn)定,所以說加入單位反饋后,抗干擾能力是有所增強,但仍不能達到理想的控制目標。要想使得小球穩(wěn)定懸浮于空中,還需要進一步探討更好的校正方法。
[1]任彥碩.自動控制原理[M].北京:機械工業(yè)出版社,2004.
[2]陶永華.新型PID控制及其應用[M].北京:機械工業(yè)出版社,1998.
[3]胡壽松.自動控制原理(第四版)[M].北京:科學出版社,2005.