農(nóng)用履帶車輛差速轉(zhuǎn)向性能的理論研究
2012-02-20 09:21:28張鴻瓊權(quán)龍哲蔣恩臣
東北農(nóng)業(yè)大學(xué)學(xué)報 2012年5期
遲 媛,張鴻瓊,權(quán)龍哲,蔣恩臣,2*
(1.東北農(nóng)業(yè)大學(xué)工程學(xué)院,哈爾濱 150030;2.華南農(nóng)業(yè)大學(xué)工程學(xué)院,廣州 510642)
對于履帶車輛,不僅要有良好的通過性能,還要具有良好的轉(zhuǎn)向性能,轉(zhuǎn)向是否靈活、轉(zhuǎn)向軌跡是否平滑,直接關(guān)系著履帶車輛的使用效率和駕駛員的勞動強度[1-2]。液壓機械雙流驅(qū)動系統(tǒng)利用了機械傳動效率高和液壓傳動無級變速的優(yōu)點,用于大功率的履帶車輛上,相對于傳統(tǒng)的離合器和制動器的轉(zhuǎn)向機構(gòu),能夠?qū)崿F(xiàn)履帶車輛的連續(xù)穩(wěn)定轉(zhuǎn)向和原地轉(zhuǎn)向[3-4],這種驅(qū)動系統(tǒng)最早應(yīng)用于軍用履帶車輛和工程機械上,在工程機械上如美國卡特彼勒公司和日本小松公司的推土機。在水稻履帶收獲機上采用這種傳動系統(tǒng),可提高勞動生產(chǎn)率和收獲機的工作效率。本文設(shè)計了液壓機械雙流驅(qū)動系統(tǒng),并對系統(tǒng)的轉(zhuǎn)向性能進行了分析。
1 液壓機械雙流驅(qū)動系統(tǒng)的設(shè)計
1.1 液壓機械雙流驅(qū)動系統(tǒng)的總體設(shè)計
液壓機械雙流驅(qū)動系統(tǒng)的總體結(jié)構(gòu)如圖1所示,由發(fā)動機1輸出的動力經(jīng)帶傳動6分成兩股功率流,一股傳到多擋變速箱5,一股傳到轉(zhuǎn)向液壓系統(tǒng)2、3、4,分別經(jīng)過A、B匯合于動力差速式轉(zhuǎn)向機構(gòu),由L和R輸出動力。轉(zhuǎn)向液壓系統(tǒng)采用變量泵2和定量馬達4組成的閉式靜液壓驅(qū)動系統(tǒng),雙向變量柱塞泵2通過閥3控制,改變泵的進、出油口,可以改變馬達輸出軸的旋轉(zhuǎn)方向,實現(xiàn)車體的左轉(zhuǎn)向或右轉(zhuǎn)向;改變泵的流量,可以改變馬達的流量和輸出轉(zhuǎn)速,與車速一同改變車體的轉(zhuǎn)向半徑。改變多擋變速箱5的擋位,從而實現(xiàn)履帶車輛的不同行走速度、前進或倒退。當多擋變速器5空擋,只有液壓系統(tǒng)工作時,接驅(qū)動輪的L和R軸向相反的方向等速旋轉(zhuǎn),車體原地向左轉(zhuǎn)向或右轉(zhuǎn)向。履帶車輛直線行走由于地面不平發(fā)生偏駛時,需要液壓系統(tǒng)輸入轉(zhuǎn)向動力,保證車輛行走的直線性。

圖1 液壓機械雙流驅(qū)動系統(tǒng)總體設(shè)計Fig.1 General design of hydro-mechanical
改變變量泵2流量和變換變速器擋位即可實現(xiàn)履帶車輛不同轉(zhuǎn)向半徑的轉(zhuǎn)向。由于液壓泵的流量是無級變化的,所以馬達軸的輸出轉(zhuǎn)速是無級變化的,所以可實現(xiàn)車體的連續(xù)穩(wěn)定轉(zhuǎn)向,有學(xué)者稱為“無級轉(zhuǎn)向”。
1.2 動力差速轉(zhuǎn)向機構(gòu)的工作原理
動力差速轉(zhuǎn)向機構(gòu)由三套行星排1,2,3組成(見圖2),起直行和轉(zhuǎn)向功率匯流的作用,直行動力由9(A)輸入,轉(zhuǎn)向動力由17(B)輸入,1(L),14(R)的動力分別傳到履帶的左、右驅(qū)動輪[5-7]。
(1)當n19≠0,n5=0時,即只有變速箱輸出動力時。

圖2 差速式轉(zhuǎn)向機構(gòu)原理Fig.2 Principles of differential steering mechanism double power steering system
如圖2所示,此時動力流向為:變速箱→驅(qū)動小齒輪9→驅(qū)動大齒輪→行星排2的行星架→
(2)當n19=0,n5≠0時,即僅有液壓馬達輸出動力時。
動力流向為:轉(zhuǎn)向馬達→轉(zhuǎn)向小齒輪17→轉(zhuǎn)向大齒輪→行星排1齒圈→行星排1的行星架→左半軸及行星排1的行星輪→行星排3的太陽輪、行星輪、行星架→右半軸。
2 參數(shù)的選擇和計算
2.1 傳動比的確定
履帶收割機的最大行走速度:V=1.5 m·s-1。
其中:r-驅(qū)動輪節(jié)圓半徑,r=0.128 m。
發(fā)動機的標定轉(zhuǎn)速(3 000 r·min-1),則發(fā)動機到驅(qū)動輪的傳動比約為28,這部分傳動比由變速器、動力差速式轉(zhuǎn)向機構(gòu)和終傳動比共同分擔。
2.2 動力差速轉(zhuǎn)向機構(gòu)行星排特性參數(shù)的確定
特性參數(shù)是行星排齒圈齒數(shù)與太陽輪齒數(shù)之比,根據(jù)本動力差速式轉(zhuǎn)向機構(gòu)的原理,各行星排特性參數(shù)滿足 a1=a3=a2-1,其中,a1、a2、a3-分別為行星排1、2、3的特性參數(shù)。根據(jù)傳動比的范圍、行星齒輪傳動的配齒條件、本差速式轉(zhuǎn)向機構(gòu)的傳動原理來確定各行星排的齒輪齒數(shù)下表1所示。
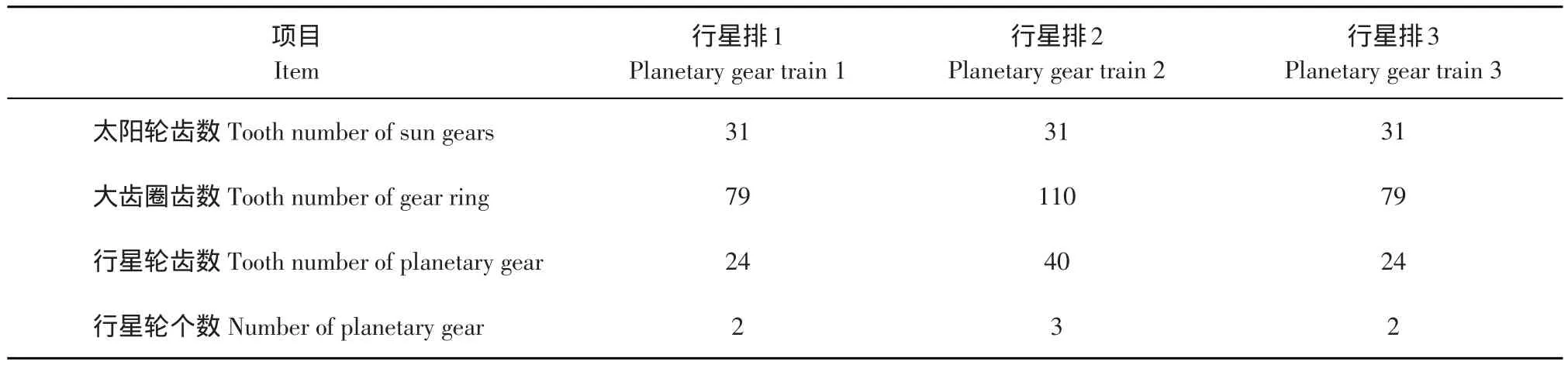
表1 各行星排的齒數(shù)Table 1 Gear's teeth number of three planetary trains
則各行星排的特性參數(shù)如下:

3 轉(zhuǎn)速關(guān)系的確定
根據(jù)差速轉(zhuǎn)向機構(gòu)的傳動原理,可求得輸出軸1、14(左、右驅(qū)動輪)與輸入軸9、17(變速器輸出軸或馬達輸出軸)之間轉(zhuǎn)速的關(guān)系為
①當只有變速器輸出動力時,此時車輛直線行走,存在

式中,i1-為齒輪副9與8的傳動比,設(shè)計為3.68。可求動力差速式轉(zhuǎn)向機構(gòu)直行傳動比為:i9,1=5.74。
②當只有轉(zhuǎn)向馬達輸出動力時,車輛繞自身中心原地轉(zhuǎn)向,存在:

式中,i2-齒輪副17與5的傳動比,設(shè)計為4.94。可求動力差速式轉(zhuǎn)向機構(gòu)的轉(zhuǎn)向傳動比為:i17,1=13.76。
③當直行和轉(zhuǎn)向馬達同時工作時,存在履帶車輛左、右兩側(cè)驅(qū)動轉(zhuǎn)速分別為:

由式(1)和圖1可知,駕駛員通過調(diào)整液壓泵排量來改變液壓馬達轉(zhuǎn)速,從而控制左、右兩側(cè)驅(qū)動輪轉(zhuǎn)速,實現(xiàn)履帶車輛的直駛、以不同轉(zhuǎn)向半徑轉(zhuǎn)向和原地轉(zhuǎn)向。
由式(1)可得

由式(2)可知,變速箱的輸出轉(zhuǎn)速決定左、右兩側(cè)驅(qū)動輪轉(zhuǎn)速之和的平均值,與車輛的行駛狀態(tài)(是否轉(zhuǎn)向)無關(guān);而馬達轉(zhuǎn)速只與左、右兩側(cè)驅(qū)動輪的轉(zhuǎn)速差值有關(guān),與它們的具體值無關(guān)。
4 轉(zhuǎn)向力矩的確定
根據(jù)動力差速轉(zhuǎn)向機構(gòu)的原理可得輸出軸1、14(左、右驅(qū)動輪)與輸入軸9、17(變速器輸出軸或馬達輸出軸)之間轉(zhuǎn)矩的關(guān)系為

若M1>M14,根據(jù)圖3得轉(zhuǎn)向力矩為


圖3 求轉(zhuǎn)向力矩Fig.3 Calculate turning moment
5 理論轉(zhuǎn)向半徑的確定


由上式可知,已知變速器輸入轉(zhuǎn)速和液壓馬達輸入轉(zhuǎn)速時,可以在理論上根據(jù)公式(6)、(8)算得轉(zhuǎn)向半徑的大小。

圖4 理論轉(zhuǎn)向半徑的確定Fig.4 Theoretical turning radius
6 理論最大轉(zhuǎn)向角速度的確定
當變速器輸入轉(zhuǎn)速為零,兩側(cè)驅(qū)動輪轉(zhuǎn)動方向相反時,且液壓馬達輸入轉(zhuǎn)向角速度最大時,履帶車輛的轉(zhuǎn)向角速度最大。如圖5所示可得:

當n9=0時,


圖5 理論最大轉(zhuǎn)向角速度Fig.5 Theoretical maximum turning angle velocity
由式(10)可得到結(jié)論:當變速器不輸入動力時,轉(zhuǎn)向角速度與轉(zhuǎn)向液壓馬達輸入轉(zhuǎn)速成正比,即轉(zhuǎn)向角速度隨轉(zhuǎn)向液壓馬達輸入轉(zhuǎn)速的增加而增加,但實際上,轉(zhuǎn)向角速度還要受地面附著力的限制,容易發(fā)生滑轉(zhuǎn),從而使轉(zhuǎn)向半徑增加,使轉(zhuǎn)向角速度減小。
7 理論最小周轉(zhuǎn)向時間的確定
周轉(zhuǎn)向時間是履帶車輛繞其轉(zhuǎn)向中心旋轉(zhuǎn)一周所需的時間。則最小周轉(zhuǎn)向時間為:

8 試驗研究
為了研究液壓機械雙流驅(qū)動系統(tǒng)的轉(zhuǎn)向性能,對采用動力差速轉(zhuǎn)向機構(gòu)的履帶車輛樣機進行了實驗[8-9],并對理論最小轉(zhuǎn)向半徑、理論最小周轉(zhuǎn)向時間進行了實驗驗證[10-12]。
8.1 最小轉(zhuǎn)向半徑的測量
測量最小轉(zhuǎn)向半徑,就是在輸入轉(zhuǎn)速n9=0,n17≠0時測得的轉(zhuǎn)向半徑,理論上最小轉(zhuǎn)向半徑為0,通過實驗可知:當轉(zhuǎn)數(shù)n17=115 r·min-1,測得最小轉(zhuǎn)向半徑平均值為0.07 m;當轉(zhuǎn)數(shù)n17=141 r·min-1,測得最小轉(zhuǎn)向半徑平均值為0.05 m;轉(zhuǎn)數(shù)n17=160 r·min-1,測得最小轉(zhuǎn)向半徑平均值為0.05 m。如兩條履帶無滑轉(zhuǎn)、滑移,或滑轉(zhuǎn)、滑移相同,則轉(zhuǎn)向半徑R=0,實際運動時總不會相同,所以造成最小轉(zhuǎn)向半徑不是0。
通過以上實驗和分析可知,本驅(qū)動系統(tǒng)在只有轉(zhuǎn)向動力源輸入時,可以實現(xiàn)一側(cè)履帶正轉(zhuǎn),另一側(cè)履帶反轉(zhuǎn),且正反轉(zhuǎn)轉(zhuǎn)速相等,轉(zhuǎn)向半徑近于零,能夠?qū)崿F(xiàn)車體的原地轉(zhuǎn)向。
8.2 最小周轉(zhuǎn)向時間的測試
n9=0時,當轉(zhuǎn)數(shù) n17=115 r·min-1,通過實測得最小周轉(zhuǎn)向時間為 45.6 s;當轉(zhuǎn)數(shù) n17=141 r·min-1,周轉(zhuǎn)向時間為30.9 s;當轉(zhuǎn)數(shù)n17=160 r·min-1,周轉(zhuǎn)向時間為28.7 s,n17輸入轉(zhuǎn)數(shù)越高,則周轉(zhuǎn)向時間越短。
根據(jù)求解最小周轉(zhuǎn)向時間的理論公式(11),可求得分別對應(yīng) n17=115 r·min-1、n17=141 r·min-1、n17=160 r·min-1的理論最小周轉(zhuǎn)向時間為:25.7、20.9、18.4 s。觀察相同轉(zhuǎn)向輸入轉(zhuǎn)速的實驗值與理論值,可知理論值小于實驗值,這是由于履帶車輛的滑轉(zhuǎn)和滑移導(dǎo)致履帶車速降低,從而使周轉(zhuǎn)向時間增大。
9 結(jié) 論
本文設(shè)計了履帶車輛的液壓機械雙流驅(qū)動系統(tǒng),并對系統(tǒng)中起功率匯流的動力差速轉(zhuǎn)向機構(gòu)進行了參數(shù)設(shè)計,通過理論分析了該動力差速轉(zhuǎn)向機構(gòu)的輸入輸出之間的轉(zhuǎn)速和扭矩關(guān)系,獲得了理論轉(zhuǎn)向半徑和理論最小周轉(zhuǎn)向時間,并通過樣機實驗獲得了實際的最小轉(zhuǎn)向半徑接近于0和不同輸入轉(zhuǎn)速下的最小周轉(zhuǎn)向時間。
[1]Maclaurin B.A skid steering model with track pad flexibility[J].Journal of Terramechanics,2007,44(1):95-110.
[2]Bodin A.Development of a tracked vehicle to study the influence of vehicle parameter tractive performance in soft terrain[J].Journal of Terramechanics,1999,36(3):167-181.
[3]遲媛,蔣恩臣.履帶車輛差速式轉(zhuǎn)向機構(gòu)性能試驗[J].農(nóng)業(yè)機械學(xué)報,2008,39(7):14-17.
[4]遲媛,蔣恩臣.履帶車輛轉(zhuǎn)向時最大驅(qū)動力矩的計算[J].農(nóng)業(yè)工程學(xué)報,2009,25(3):74-78.
[5]張銀彩,黃宗益.差速式轉(zhuǎn)向機構(gòu)的動力學(xué)分析[J].工程機械,1998(9):21-22.
[6]趙建軍.履帶車輛差速式轉(zhuǎn)向機構(gòu)動力學(xué)分析與比較[J].工程機械,2002(8):18-21.
[7]李嵐.新型差速轉(zhuǎn)向機構(gòu)設(shè)計[J].機械工程師,2000(12):8-9.
[8]方志強,高連華,王紅巖.履帶車輛轉(zhuǎn)向性能指標分析與試驗研究[J].裝甲兵工程學(xué)院學(xué)報,2005(12):47-50.
[9]程軍偉,高連華,王紅巖.基于打滑條件下的履帶車輛轉(zhuǎn)向分析[J].機械工程學(xué)報,2006,42(5):192-195.
[10]Rubinstein D,Hitron R.A detailed multi-body model for dynamic simulation of off-road tracked vehicles[J].Journal of Terramechanics,2004,41(4):163-173.
[11]Ferretti G,Girelli R.Modeling and simulation of an agricultural tracked vehicle[J].Journal of Terramechanics,1999,36(3):139-158.
[12]Song H,Ko Ju-Hyun,Kim D.High efficiency on- chip charge pump DC-DC converter for LCD drivers[J].Current Applied Physics,2007,7(9):450-455.
