新型地感線圈測速儀檢定裝置關鍵技術(shù)研究
2012-02-03 08:45:56葉振洲邵建文
自動化儀表 2012年8期
關鍵詞:信號
林 峰 嚴 瑾 葉振洲 邵建文
(浙江省計量科學研究院,浙江 杭州 310013)
新型地感線圈測速儀檢定裝置關鍵技術(shù)研究
林 峰 嚴 瑾 葉振洲 邵建文
(浙江省計量科學研究院,浙江 杭州 310013)
介紹了地感線圈測速儀的測速原理,提出了一種利用電流信號作為干擾信號來模擬標準車速的方法。利用ARM9控制板作為主控單元,集成信號處理、電流調(diào)節(jié)、雷莫接口等各個子模塊,最終實現(xiàn)整個檢定裝置系統(tǒng)。實際試驗結(jié)果表明,該裝置能準確高效地檢定各種型號的地感線圈測速儀,值得推廣使用。
地感線圈 測速儀 電流干擾信號 磁通量 模擬 計量 檢定
0 引言
隨著汽車工業(yè)的發(fā)展,機動車保有量迅速增長,同時也帶來了更多的交通違章和安全隱患問題。在各種交通違章問題中,機動車超速行駛占了很大的比例,而車輛在超速行駛時存在著嚴重的安全隱患。因此,機動車超速行駛被認為是威脅道路交通安全的一個重要因素。
機動車超速自動監(jiān)測系統(tǒng)是指安裝在高速公路和城市道路上具有超速監(jiān)測和執(zhí)法取證雙重功能的交通執(zhí)法和管理的技術(shù)設備。目前,按照測速原理,國內(nèi)超速自動監(jiān)測系統(tǒng)可以分為雷達測速儀、地感線圈測速儀(以下簡稱測速儀)和激光測速儀。其中地感線圈測速儀具有性能穩(wěn)定、結(jié)構(gòu)簡單、檢測電路易于實現(xiàn)、成本低、維護量少、適應面廣等特點,能實現(xiàn)車輛圖像記錄、速度測定、車輛號牌識別、布控緝查車輛報警自動報警、流量統(tǒng)計等功能,取證能力高于其他類型的測速儀,在交通管理超速監(jiān)控中發(fā)揮著重要的作用。本文提出了一種基于電流信號的地感線圈測速儀模擬速度檢定裝置(以下簡稱檢定裝置)。
1 測速儀原理及檢定方法
1.1 測速儀原理
測速儀基于電磁感應原理[1],其測速傳感器是一個埋在路面下的環(huán)形線圈。根據(jù)電磁場理論可知,任何載荷導線都會在其周圍產(chǎn)生磁場,對于N匝、長度為l的螺線管型線圈,其自感量為:

地感線圈測速系統(tǒng)一般由一組(兩個或三個)地感線圈組成[2-3],線圈間距設定為恒定值,當車輛經(jīng)過第一個地感線圈時,車檢器檢測出一個脈沖信號,此脈沖信號保持在高電平狀態(tài),直至車輛全部通過。同樣,當車輛經(jīng)過第二個地感線圈時,車檢器也能檢測出一個脈沖信號。根據(jù)兩個脈沖信號的時間間隔和恒定的線圈間距即可以求出車速。
1.2 測速儀檢定方法
信號模擬檢定是用外加干擾信號引起測速儀的磁通量變化[4]。檢定裝置先后對地感線圈發(fā)出兩個脈沖信號,測速儀將其視作車輛通過時的信號,并根據(jù)信號得到一個速度值,將該速度值與檢定裝置的標準速度值進行比對就可以實現(xiàn)對測速儀的檢定。此方法精度高、測試范圍廣、重復性好。
2 檢定裝置的設計
檢定裝置配有可調(diào)電流模塊,電流信號大小可以選擇,可調(diào)電流模塊電流可調(diào)范圍為7 mA~1 A,便于模擬不同車型車輛通過地感線圈時所產(chǎn)生的磁通量變化。檢定裝置主機還包括觸摸屏模塊、液晶顯示模塊、雷莫接口、蓄電池、電源模塊、主控模塊、磁通量信號處理模塊等,其內(nèi)部結(jié)構(gòu)如圖1所示。
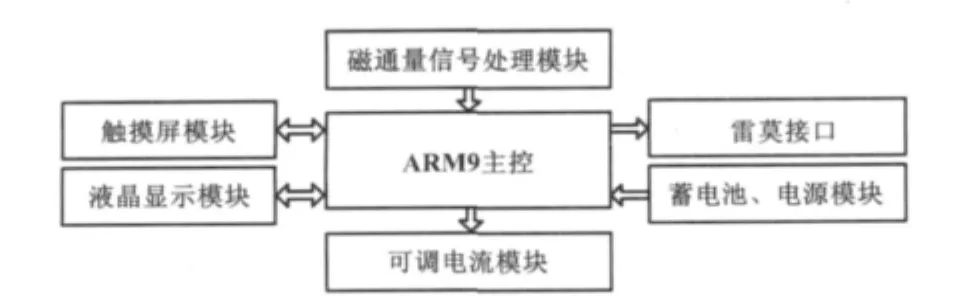
圖1 內(nèi)部結(jié)構(gòu)圖Fig.1 Internal structure
ARM9主控采用三星公司的S3C2410單片機,主頻 400 MHz,其 I/O 口(GPB0、GPG3、GPE11、GPB10、GPG7、GPE13)與可調(diào)電流模塊相連。主控通過A/D模塊與觸摸屏模塊相連,一方面發(fā)出數(shù)據(jù)通過觸摸屏顯示,另一方面檢測觸摸屏的按鍵。單片機的雷莫接口與干擾線圈2相連,蓄電池及電源模塊為基于電流信號的測速儀模擬檢定裝置供電,且斷電時可以工作8 h[5]。檢定裝置的實際工作示意圖如圖2所示。
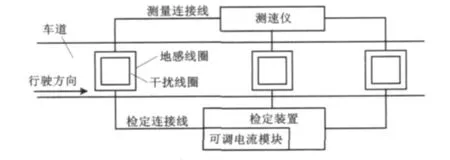
圖2 檢定裝置工作示意圖Fig.2 Schematic of the calibrating device
3 關鍵技術(shù)問題及解決方案
3.1 干擾信號的選擇
一般檢定裝置的干擾信號默認為開關信號,但實際檢定過程中發(fā)現(xiàn)開關信號在很多方面存在弊端,如容易受外界干擾、調(diào)節(jié)車檢器靈敏度系數(shù)概率高、測速誤差不穩(wěn)定等。因此,基于上述考慮,檢定裝置選擇了抗外界干擾能力強的電流信號。
3.2 檢定裝置體積的控制
目前市場上已有的檢定裝置普遍存在體積較大、質(zhì)量較重等問題,對日常的檢定工作造成諸多不便。本文介紹的基于電流信號的檢定裝置采用ARM9控制板作為主控單元,集成各個子模塊,裝置體積減小一半,質(zhì)量下降一半左右,減輕了下廠檢定人員的負擔。
3.3 信號間隔時間的控制
檢定裝置給測速儀兩個線圈施加干擾信號的時間間隔的計算方法為[6-7]:

式中:l為兩個線圈之間的距離,m;v為車速,m/s;t為兩個干擾信號間隔,s。假設車長為s,則干擾信號(高電平)持續(xù)時間為:

3.4 線圈匝數(shù)與線圈大小的選擇
不同的線圈匝數(shù)和線圈規(guī)格可以模擬不同類型的車輛通過狀態(tài),廠家在實際標定過程中有時需要不斷調(diào)整車檢器靈敏度系數(shù)來適應檢定裝置的特征。因此,為了便于標定,檢定裝置的線圈匝數(shù)和線圈大小就顯得非常重要。經(jīng)過多次試驗,最終選擇了規(guī)格為1 500 mm×600 mm、繞20匝、FVN1×0.5的高溫線。實際檢定結(jié)果表明,這種線圈基本接近實際車輛特征,并且有效地減小了標定過程中調(diào)整車檢器靈敏度系數(shù)的概率。
3.5 干擾問題
使用某廠家的檢定裝置對某測速儀的一個車道進行檢定,其他車道有車輛經(jīng)過時會對其造成極大干擾,此時測速儀廠家會把其他車道的輸入信號屏蔽掉,這樣做非常繁瑣。本裝置采用了電流信號等方式,可以增強信號的抗干擾能力。
3.6 自動連續(xù)檢測
根據(jù)JJG 527-2007機動車超速自動監(jiān)測系統(tǒng)規(guī)定,需要對20 km/h、60 km/h、80 km/h、100 km/h、120 km/h、150 km/h、180 km/h 速度點進行檢定[8-9],每個速度值測量3次。本檢定裝置在程序中集成了自動連續(xù)檢測功能,即裝置可自動根據(jù)這些速度點計算出發(fā)送時間的間隔,每秒鐘完成一個信號的發(fā)送,21 s即完成所有速度點的3次檢定。檢定裝置信號發(fā)送完成以后,只需到測速儀主機上查看數(shù)據(jù)即可[10]。
4 計量性能及適用性試驗研究
4.1 檢定裝置計量性能試驗研究
選用型號為DSA8200的高精度示波器對檢定裝置發(fā)出的電流信號進行測試,電流信號幅值穩(wěn)定性小于1%,電流信號時間控制誤差小于50 μs。被檢測速儀安裝在地面下的線圈一般為4 m,最高檢定速度點為180 km,產(chǎn)生的模擬速度不確定度小于0.2 km/h。JJG 527-2007規(guī)定,當速度≤100 km/h時,測速儀模擬速度最大允許誤差為-4~0 km/h;當速度>100 km/h時,測速儀模擬速度最大允許誤差為-4% ~0%;而檢定裝置不確定度為0.2 km/h。因此,檢定裝置計量性能滿足量值傳遞的要求。
4.2 檢定裝置適用性能試驗研究
試驗對象為安裝在路面的在用測速儀,選擇型號1(VSyns-B)、型號2(GDW-VM-2003/2A)、型號 3(DHITC200CB)進行檢定試驗,檢定裝置發(fā)出檢定點的標準值,檢定點根據(jù)JJG 527-2007要求(20 km/h、60 km/h、80 km/h、100 km/h、120 km/h、150 km/h、180 km/h),每點檢定10次,檢定點最大誤差如圖3所示。
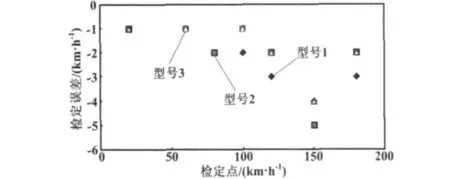
圖3 檢定誤差分布Fig.3 Distributation of the calibration errors
由圖3可得,3個型號的測速儀最大誤差符合JJG 527-2007的要求:當檢定點≤100 km/h時,最大誤差為-2 km/h;當檢定點 >100 km/h時,最大誤差為-5 km/h(-3.3%)。可見檢定裝置能夠檢定不同廠家的測速儀,且數(shù)據(jù)準確、可靠。
5 結(jié)束語
測速儀以其結(jié)構(gòu)簡單、性能穩(wěn)定、適用面廣等特點被廣泛應用于交通管理超速監(jiān)測中,而同時由于各種問題,在實際測速的過程中往往會發(fā)生測速不準確、誤差較大的情況,從而造成對機動車駕駛員的誤處罰。因此,必須定期對測速儀進行檢定。文中提出了一種新型的基于電流信號的測速儀模擬速度檢定裝置。該裝置不僅實現(xiàn)了傳統(tǒng)的檢定裝置的功能,而且在干擾信號的選擇上使用了電流信號,在體積控制、線圈匝數(shù)和大小的選擇以及抗外界干擾等問題上都實現(xiàn)了重大的突破。同時,根據(jù)檢定規(guī)程,該裝置還實現(xiàn)了自動連續(xù)監(jiān)測的功能,有效地降低了檢定工作強度,提高了工作效率。
[1]高富榮,方強.機動車地感線圈測速監(jiān)測系統(tǒng)及檢測方法研究[J].上海計量測試,2008,35(2):27-28.
[2]林仲楊.地感線圈式機動車超速自動檢測系統(tǒng)的檢定方案[J].中國計量,2008(6):107-108.
[3]孫橋,蔡常青,張躍,等.機動車測速儀模擬檢測技術(shù)的現(xiàn)狀及應用中存在的問題[J].中國計量,2010(6):80-82.
[4]方強.機動車超速自動監(jiān)測系統(tǒng)的檢定[J].中國計量,2011(4):102-103.
[5]聶崗.檢定/校準地感線圈測速系統(tǒng)原理分析[J].中國計量,2010(4):60-62.
[6]郭亮,劉廣孚,聶崗,等.基于附加電感的地感線圈測速校準方法研究[J].計量技術(shù),2009(8):48-50.
[7]郝憲鋒,劉廣孚.機動車測速儀校準系統(tǒng)的設計與實現(xiàn)[J].科學技術(shù)與工程,2009,9(13):36-38.
[8]國家質(zhì)量監(jiān)督檢驗檢疫總局,中國國家標準化管理委員會.JJG 527-2007機動車超速自動監(jiān)測系統(tǒng)國家檢定規(guī)程[S].北京:中國標準出版社,2007:4-5.
[9]國家質(zhì)量監(jiān)督檢驗檢疫總局.GB/T 21255-2007機動車測速儀[S].北京:中國計量出版社,2008:5-8.
[10]王麗娜,于立君.煙氣二氧化硫排量在線監(jiān)測系統(tǒng)[J].自動化儀表,2011,32(9):50-53.
Research on the Key Technologies of a New Type of Calibrating Device for Ground Inductive Coil Speedometer
The speed measuring principle of inductive coil speedometer is introduced,and the method of using current signal as interference signal to simulate standard vehicle speed is proposed.By adopting ARM9 control board as the main control unit to integrate the sub-modules such as signal processing,current regulating,and Lemo interface,etc.,for implementing the calibrating device.The results of practical test indicate that the device can be used to calibrate various types of inductive coil speedometers accurately and efficiently;it is worth to be promoted.
Ground inductive coil Speedometer Current interference signal Magnetic flux Simulation Measurement Calibration
TP23
A
修改稿收到日期:2011-11-22。
林峰(1982-),男,現(xiàn)為浙江大學電氣工程專業(yè)在讀碩士研究生;主要從事交通測速設備計量方面的研究。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06