10赫茲漫反射激光測距控制系統的設計與實現*
2012-01-25 07:54:04李祝蓮李語強伏紅林鄭向明何少輝
天文研究與技術 2012年3期
李祝蓮,李語強,伏紅林,鄭向明,何少輝
(中國科學院國家天文臺/云南天文臺,云南 昆明 650011)
云南天文臺激光測距組于1998年在1.2 m地平式望遠鏡上建立了高指向精度、收/發共光路的衛星精密激光測距系統,并于同年正式參加國內和國際激光測距聯測,測距頻率為1~10 Hz,單次測距精度優于3 cm,測時設備為SR620時間間隔計數器[1-2]。傳統的低頻激光測距方式受到了千赫茲激光測距技術的挑戰,千赫茲激光測距技術是近幾年發展起來的新技術,它通過增加測距頻率來增加觀測數據和提高標準點精度,觀測數據量的增加,可以有效地提高標準點的精度,利于衛星的精密定軌,是激光測距的發展方向之一[3]。在國家重大科技基礎設施建設項目中國大陸構造環境監測網絡的支持下,2010年研究組在1.2 m望遠鏡上成功建立了千赫茲激光測距系統,并進入常規觀測。
通過成功建立上述兩套激光測距系統,研究組積累了大量的激光測距相關技術和經驗,包括激光衛星軌道預報、激光測距主波與回波信號探測技術、數據采集技術和測量數據處理技術等。基于已有的技術和經驗,研究組新建了10 Hz激光測距系統,對激光衛星實現了成功測距試驗后將測距目標定位為空間碎片,并于2010年6月7日對幾個火箭殘骸進行了漫反射激光測距試驗,首次收到空間碎片測距回波,表明10 Hz漫反射激光測距控制系統是行之有效的。本文根據共光路激光測距的實現方式,在1.2 m望遠鏡上成功建立10 Hz共光路激光測距系統,可實現對激光衛星測距和漫反射目標測距,測距精度約為50 cm,文中對該系統的控制系統實現原理和方法進行了詳細的闡述。
1 測距控制系統設計
漫反射激光測距與傳統衛星激光測距的原理基本相同,都是通過測量激光脈沖從地面觀測站到空間目標的往返時間,從而獲得空間目標的距離。主要不同點是傳統衛星激光測距中目標預報距離相對精確,而對于漫反射激光測距目標——空間碎片距離預報誤差較大。據此對10 Hz激光測距系統作出如下設計。
1.1 硬件構建
測距控制系統如圖1,包括收/發轉鏡、C-SPAD探測器、SR620時間間隔計數器、PIN主波探測器、激光器和控制計算機等。收/發轉鏡產生同步信號,控制計算機在收到該信號時刻根據用戶指令選擇激光發射頻率和是否發送激光點火指令給激光器;激光經PIN主波探測器產生主波信號送SR620時間間隔計數器,同時送回控制計算機計算C-SPAD門控時刻,結果送距離門發生器;在回波快到達時刻由它產生門控信號給C-SPAD單光子探測器探測回波信號,并由SR620測量它與主波間的時間間隔,送控制計算機進行數據初步處理及顯示,用于實時測距監測。
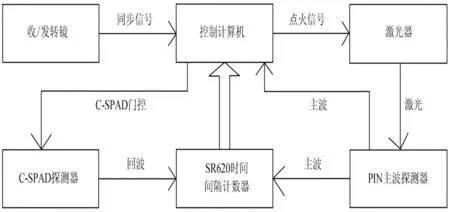
圖1 1.2 m望遠鏡10 Hz激光測距控制框圖Fig.1 Block diagram of the control system of the 10Hz Satellite Laser Ranging(SLR)on the 1.2 Telescope
1.2 電路時序圖
圖2為10 Hz測距控制系統電路時序圖。旋轉快門產生10 Hz同步信號,在每個同步信號上升沿,控制計算機產生一個激光發射指令信號給激光器發射激光;PIN主波探測器將探測到每次發射的激光信號并輸出主波脈沖;一旦接收到主波信號,控制計算機就根據觀測目標規定的距離信息計算回波到達時刻送距離門發生器,由它在回波快到達時刻送門控信號給C-SPAD單光子探測器。
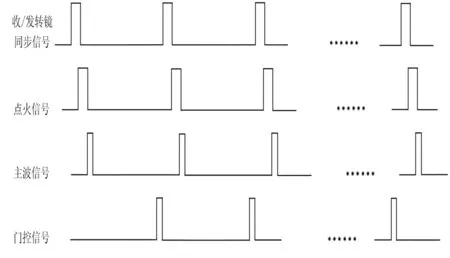
圖2 1.2 m望遠鏡10 Hz激光測距系統工作時序圖Fig.2 Timing signals of the 10Hz SLR
2 系統主要設備控制
激光測距過程中,主要是實現激光器發射激光,主、回波探測以及時間或時刻測量,對系統這幾部分的實現進行詳細的闡述和分析。
2.1 激光器控制
2.1.1 激光器工作方式
系統選用SGR系列脈沖固體激光器,它具有內觸發和外觸發兩種工作方式。在內觸發方式下,將控制界面的信號切換鍵按到內時統狀態并按照正常的激光器操作順序進行。在外觸發方式下,除了將控制界面的信號切換鍵按到外時統狀態外,還需要向激光器提供A和B兩路控制信號,A路上升沿觸發閃光燈放電,B路上升沿觸發Q開關,兩路信號之間的延時至少設為592 μs。激光器在外觸發方式下的工作時序圖如圖3。
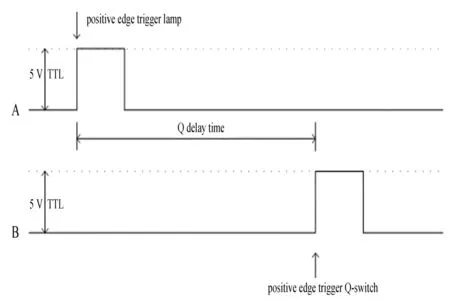
圖3 激光器外觸發工作時序圖Fig.3 Timing signals of the external triggering of the laser
2.1.2 激光器遠程控制實現
測距時,激光器工作在外觸發方式下,即由計算機對激光器進行遠程控制。根據激光器在外觸發方式下的特點,系統采用了Altera公司的現場可編程門陣列(Field-Programmable Gate Array,FPGA)芯片[4]實現激光器的計算機遠程控制,電路框圖如圖4。圖中虛線框內的部分是在FPGA芯片上實現的,包括Nios片上系統和計數器等數字電路。計算機與FPGA之間使用RS-232串口進行通信,傳達開始發射激光(start)、暫停發射激光(pause)、暫停后重新開始發射激光(re-start)和停止發射激光(stop)等指令。Nios系統采用串口中斷方式響應計算機指令,中斷程序如下:
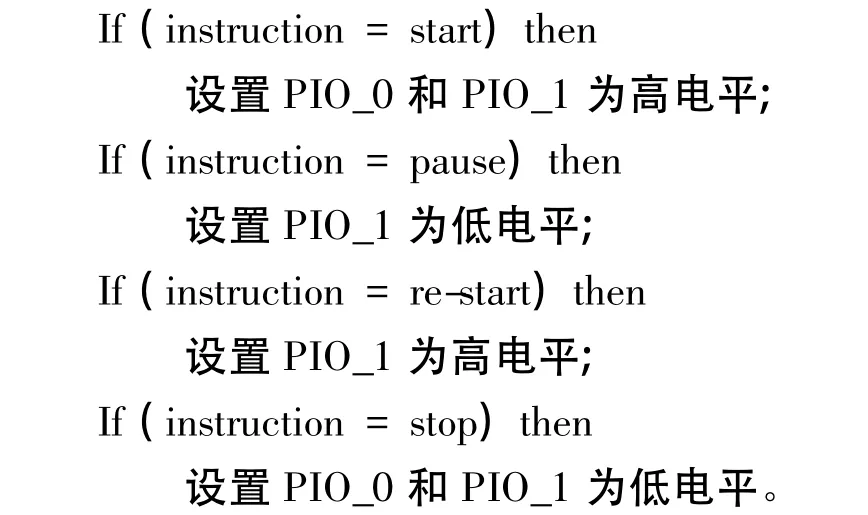
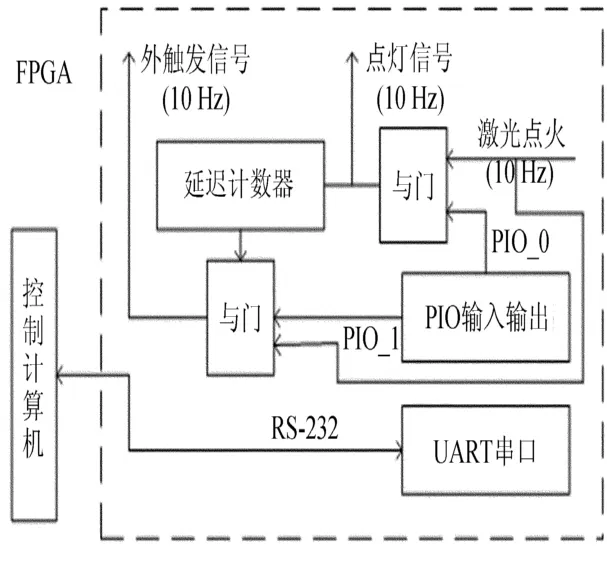
圖4 激光器計算機控制框圖Fig.4 Block diagram of the computer control system of the laser
再配合其它的電路可以實現激光器在測距過程中有效工作,即計算機發送start信號后,PIO_0和PIO_1信號為高電平,同時產生10 Hz點燈信號作為A路控制信號送至激光器閃燈,并將該信號送延遲計數器延遲約592 μs后產生10 Hz外觸發信號作為B路控制信號送激光器發射激光;發送pause信號后,PIO_1為低電平而PIO_0依然為高電平,使B路控制信號為低電平實現暫停發射激光而繼續閃燈;發送re-start信號后,PIO_0被重新設置為高電平,激光器繼續發射激光;發送stop信號后,PIO_0和PIO_1均被設置為低電平,完成或結束一圈目標測距。
2.2 單光子探測器控制
由于激光衛星的軌道一般比較穩定,徑向距離可以預報得較準,激光回波到達時刻可以比較準確地預報,所以衛星激光測距廣泛采用距離門控制技術,即時間濾波技術,非常有效地抑制噪聲的干擾。直到回波到來之前瞬間才給C-SPAD單光子探測器送開門控制信號。這樣使得噪聲干擾的概率減到最小,100 ns的門控精度,噪聲減小為原來的10-6,使得淹沒在眾多噪聲中的單光子回波探測成為可能[5]。
距離門控的產生原理和方式跟帶激光后向反射器的測距系統[6]一致,但由于非合作目標距離預報存在較大誤差,所以設計中設置了距離門控信號具有更大的變化范圍,觀測時,需通過大幅改變距離門控的輸出時間范圍有效地探測目標的回波信號。
2.3 測時設備控制
云南天文臺衛星激光測距系統目前正使用的測時儀器是時間間隔計數器SR620、OTL110P事件計時器和A033-ET事件計時器。三者的性能見表1[7-9]。

表1 時間間隔計數器SR620、事件計時器OTL110P和A033-ET的性能Table 1 Performance paraneters of the SR620 time-interval counter,OTL110P event timer,and the A033-ET
A033-ET性能最好,而事件計時器OTL100P的標準偏差優于時間間隔計數器SR620。A033-ET和OTL100P具有直接測量事件發生時刻的特點和高測量精度的優勢,能滿足云南天文臺現有多脈沖激光測距和將來激光測月對測時系統的要求。在10 Hz漫反射激光測距系統中,采用SR620即可滿足測距需求,但如果使用該系統進行月球激光測距,那么需要選擇OTL110P,它可以方便地在時間間隔測量和時刻測量兩種工作模式之間切換。
SR620通過RS-232串口數據線與計算機連接,觀測時,控制計算機發送采集數據控制命令至SR620時間間隔計數器,取回測量數據并在計算機屏幕上顯示測量結果用于指示是否測到回波信息。
3 觀測試驗
測距系統已經用于觀測,并獲得一些空間目標漫反射測量數據,圖5為2011年1月26日對空間碎片(目標代號:25400)的觀測結果,表2給出了對觀測數據的處理結果。

圖5 空間碎片觀測數據Fig.5 Observed data of space debris
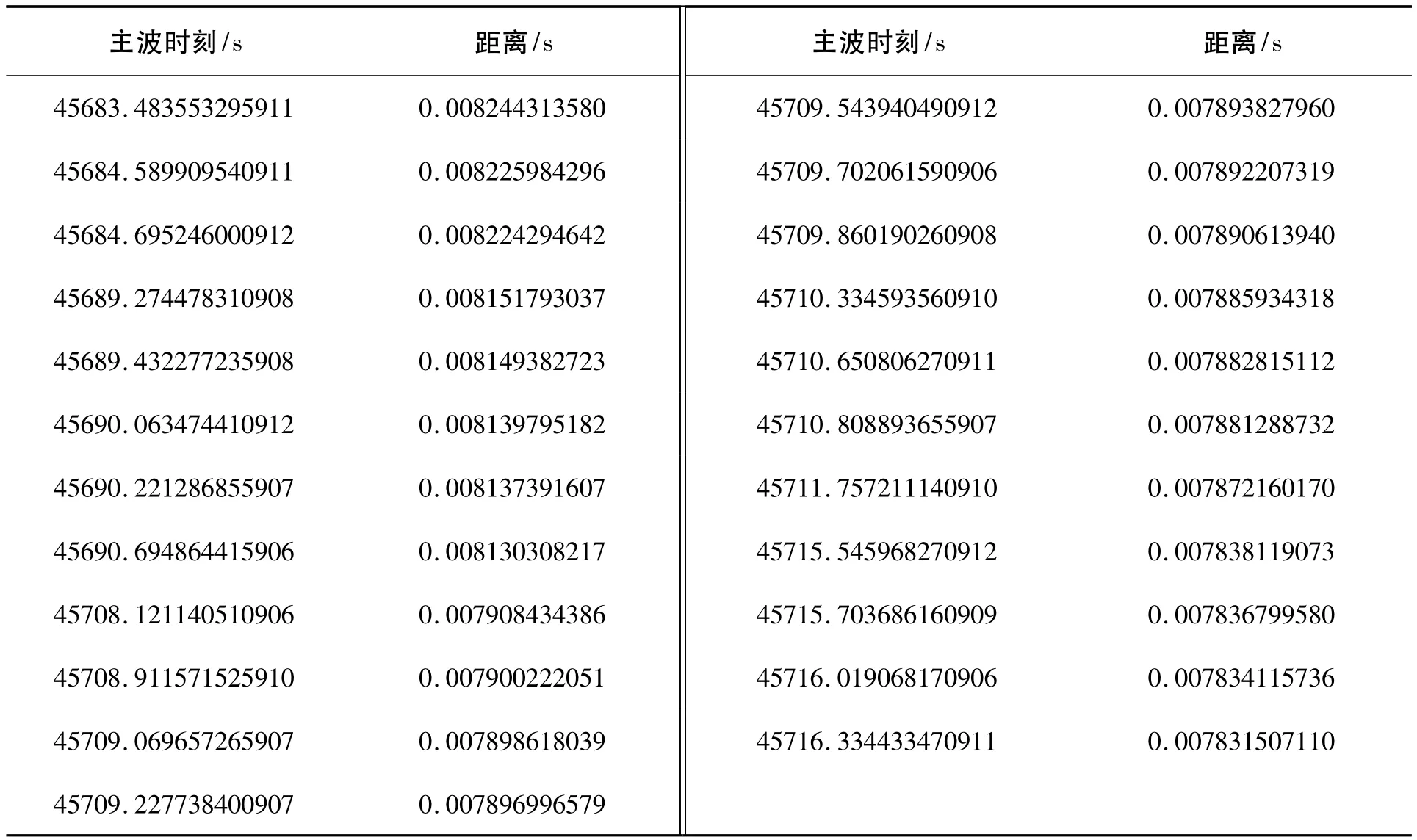
表2 對空間碎片25400的觀測數據(精度約200 cm)Table 2 Observation data of the space debris 25400(about 200 cm accuracy)
4 結論
實際觀測結果表明,10 Hz漫反射激光測距控制系統能有效地對空間目標進行測距工作,包括激光測距衛星和空間碎片。但因激光器脈寬較大,約為10 ns,不能達到很高的測距精度,故對激光測距衛星的觀測僅僅為了檢驗該測距系統是否正常。由于10 Hz漫反射激光測距系統采用了高功率大能量激光器,所以可以嘗試用它進行月球激光測距,只需將測時設備SR620換為OTL100P事件計時器或A033-ET事件計時器以及對測時設備控制電路和數據采集程序進行相應的變換設計即可。存在的不足之處仍然是測距精度不高,結果證明該系統具有月球激光測距能力,月球激光測距是研究組的另一重要研究課題,目標是研制出至少能達到厘米級測距精度的激光測月系統。
[1]何妙嬋,鄭向明,姜崇國.云南天文臺激光測距中使用的光電探測器 [J].云南天文臺臺刊,2003(3):62-67.He Miaochan,Zheng Xiangming,Jiang Chongguo.The detectors of satellite laser ranging in Yunnan observatory [J].Publications of the Yunnan Observatory,2003(3):62-67.
[2]李祝蓮,熊耀恒,何妙嬋,等.云南天文臺人造衛星激光測距系統原理 [J].天文研究與技術——國家天文臺臺刊,2008,5(3):248-252.Li Zhulian,Xiong Yaoheng,He Miaochan,et al.Principle of 1.2m telescope satellite laser ranging system [J].Astronomical Research & Technology——Publications of National Astronomical Observatories of China,2008,5(3):248-252.
[3]吳志波,張忠萍,楊福民,等.衛星激光測距回波探測成功概率統計分析 [J].測繪科學,2006,31(3):28-29.Wu Zhibo,Zhang Zhongping,Yang Fumin,et al.Statistical analysis of successful detection probability of the returns in satellite laser ranging [J].Science of Surveying and Mapping,2006,31(3):28-29.
[4]Altera-FPGA、CPLD、ASIC 和可編程邏輯 [EB/OL].[2011-10-10].http://www.altera.com.cn/?rd=en.
[5]葉叔華,黃珹.天文地球動力學 [M].山東:山東科學技術出版社,2000:91-118.
[6]李祝蓮,熊耀恒.云南天文臺衛星激光測距中的測時儀器 [J].天文研究與技術——國家天文臺臺刊,2008,5(2):161-166.Li Zhulian,Xiong Yaoheng.Timing device used in Kunming satellite laser ranging station [J].Astronomical Research & Technology——Publications of National Astronomical Observatories of China,2008,5(2):161-166.
[7]Measurements with the SR620 [EB/OL].[2011-10-10].http://www.thinksrs.com.
[8]OTL110P用戶手冊 [M].Observation Technology Lab.2006.
[9]Event timer A033-ET manual[M].Institute of Electronics and Computer Science.2009.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
