中國區域定位系統的水平定位誤差分布研究*
2012-01-25 07:54:06馬利華張麗榮季海福
天文研究與技術 2012年3期
王 萌,馬利華,張麗榮,季海福
(1.中國科學院國家天文臺,北京 100012;2.中國科學院研究生院,北京 100049)
中國區域定位系統(Chinese Area Positioning System,CAPS)是基于通信衛星的轉發式衛星導航系統。該系統將原子鐘放置于地面中心站,導航信號和電文從地面站發射,經由同步通信衛星轉發至用戶接收機,通過對導航信號的捕獲跟蹤,接收機實現測距和導航定位。由于系統原子鐘放置于地面中心站,CAPS與GPS、GLONASS等直播式衛星系統相比,可以少發射甚至不發射專用導航衛星,可以更容易產生導航電文和易于維護高精度的時間信號。基于這樣的設計,CAPS既減少了發射導航衛星的費用又縮短了組建導航系統的周期。在CAPS系統的試驗驗證階段,用戶接收機通過接收地球靜止軌道(Geostationary Earth Orbit,GEO)通信衛星轉發的導航信號,結合CAPS氣壓測高技術實現高程輔助下的導航定位[1-3]。
在衛星導航定位系統中,用戶的定位精度主要取決于偽距測量誤差和衛星星座的空間布局兩個因素。其中,偽距測量誤差主要來源于星歷誤差、衛星鐘差、大氣傳播時延、多路徑效應、接收機噪聲等;同時,測量誤差的大小與信號的強弱和接收機性能有關。星座空間布局一般用精度衰減因子(Dilution of Precision,DOP)描述,其數值可用于估算星座空間布局對用戶偽距測量誤差的放大程度[4-5]。在相同的偽距測量誤差條件下,較小的精度衰減因子值意味著較小的定位誤差[5-6]。在試驗驗證階段,由于CAPS接收機采用了高程輔助定位方程,這與通常采用的偽距觀測方程不同,要分析高程輔助下的定位誤差分布特點,需要對現有的精度衰減因子值計算方法進行改造。為了考察CAPS用戶的水平定位誤差,本項工作中定義了高程輔助定位方程下的東精度衰減因子(Dilution of Precision East,EDOP)和北精度衰減因子(Dilution of Precision North,NDOP),分析CAPS的仿真和實測數據,并對CAPS用戶的定位誤差分布特征給了初步的解釋。
1 高程輔助下的EDOP和NDOP計算
通常情況下,在地心地固坐標系中用戶的偽距觀測方程可寫為:

式中,ρj為偽距觀測值;(sj1,sj2,sj3)表示衛星sj的三維坐標;(x1,x2,x3)表示用戶的三維坐標;tu表示用戶的時鐘偏差;vj表示偽距測量誤差。將(1)式按泰勒級數在用戶近似位置展開:
式中,δρj表示真實偽距與估計偽距的差值;δxi(i=1,2,3)表示對用戶近似位置的修正量。上式的矩陣形式為:
這里,系數矩陣H中(ej1,ej2,ej3)對應用戶到第j顆衛星的方向余弦;v是偽距測量的誤差向量。利用最小二乘法,定位解可由下式給出:

這里,HT是矩陣H的轉置矩陣。據此,可以求解用戶的三維坐標和接收機鐘差。
為了更直觀地描述用戶的位置信息,將(3)式中的系數矩陣轉換到站心坐標系內,轉換矩陣為:

式中,φ0和λ0分別為測站的大地緯度和大地經度。引入精度衰減矩陣Q=(HTH)-1,矩陣Q的分量形式可表述為:
幾何精度衰減因子(Geometric Dilution of Precision,GDOP)由下式給出:

常規精度衰減因子還包含三維位置精度衰減因子(Position Dilution of Precision,PDOP)、水平精度衰減因子(Horizontal Dilution of Precision,HDOP)、垂直精度衰減因子(Vertical Dilution of Precision,VDOP)和時間精度衰減因子(Time Dilution of Precision,TDOP),它們分別可利用下式計算:

式中,HDOP和VDOP分別描述了星座布局對偽距測量誤差在水平和垂直兩個方向上的誤差放大程度,因此,HDOP和VDOP只有在站心坐標系下計算才有意義。
在CAPS試驗驗證階段,用戶接收機利用氣壓測高計獲取本地高度,僅用3顆衛星就可以實現用戶的三維定位。當然,更多的可視衛星可以進一步改善用戶的定位結果。在CAPS高程輔助定位算法中,氣壓測高計測量的高度值被轉換為用戶到位于地球中心的虛擬衛星的幾何距離[7]。CAPS氣壓測高的精度優于2 m,通過合理布局氣象基準站,可以得到更高的測高精度[3,8]。由于氣壓測高的偽距觀測方程不受用戶接收機的時鐘偏差的影響,CAPS接收機偽距觀測方程和氣壓測高觀測方程的泰勒展開公式為:
式中,δρk(k=1,2,3,…,n)表示基于真實高度轉換的偽距與基于估計高度轉換的偽距的差值;vn表示高程測量的誤差。由于用戶接收機本地高度值是由高度計提供的,在站心坐標系下計算精度衰減矩陣Q時,不再考慮高程方向。此時,Q是一個3×3矩陣,其分量形式如下:

2 分析與比較

2.1 EDOP和NDOP覆蓋
CAPS試驗驗證階段的3顆GEO通信衛星分別位于87.5°E、110.5°E和142°E軌位。根據上文對EDOP和NDOP的定義,可以計算出系統星座覆蓋區內任一地點的EDOP和NDOP值(圖1)。
由圖1可見,赤道面附近的條帶區域是該系統星座的盲區,這是由于當用戶接近赤道面附近時,(10)式中EDOP和NDOP不存在。從圖中還可以看出,EDOP和NDOP是南北對稱分布的,這是由于GEO通信衛星位于赤道面附近,所以北半球和南半球的EDOP和NDOP分布關于赤道面對稱;同時還可以注意到,兩個因子也是東西對稱分布的,這種分布特征主要源于系統采用GEO衛星的軌位分布。在覆蓋區域內,EDOP數值在1.3到7.9之間變化。EDOP最小值出現在3顆GEO衛星定點軌位的平均經度子午圈附近;在同一緯度圈上,離該子午圈越遠,EDOP數值越大。總體而言,任一格點上的NDOP總是大于EDOP,NDOP最小值為9.2,最大值達到80甚至更大,這是由于系統采用的衛星都處于赤道面附近,東西方向拉開,而南北方向比較集中。當用戶由低緯度地區向高緯度地區移動時,在站心坐標系內衛星在南北方向拉開的距離增大,NDOP變小。
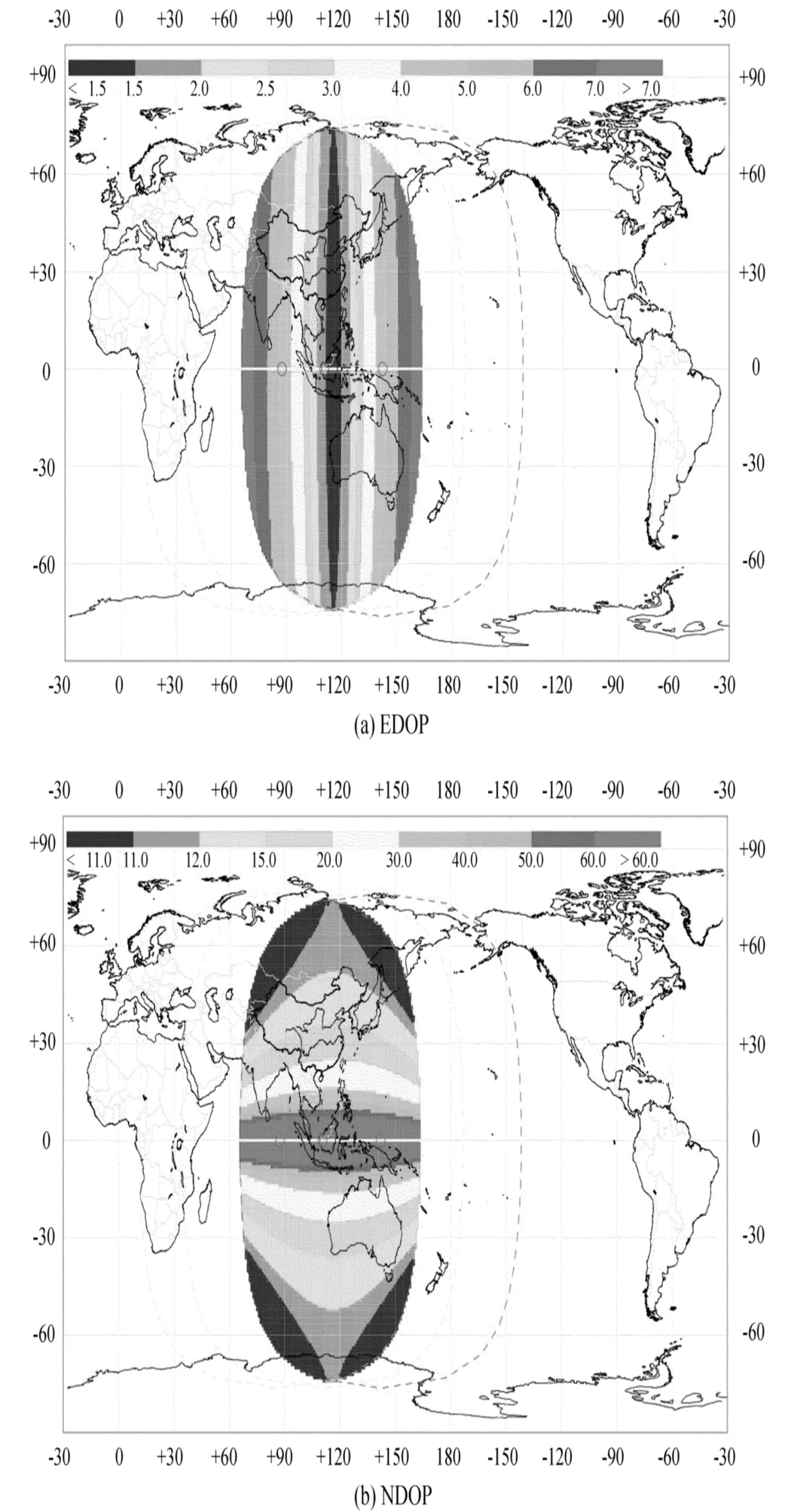
圖1 CAPS試驗驗證星座的EDOP(a)和NDOP(b)覆蓋圖Fig.1 Coverage maps of EDOP(a)and NDOP(b)for the satellite constellation during the test stage of CAPS
2.2 仿真分析
如前節所述,EDOP小于NDOP,因此東西方向的定位精度總是優于南北方向。為了驗證這一點,分別選擇北京、上海、長春、西安、烏魯木齊和昆明觀測站位置作為用戶接收機位置進行仿真,3顆衛星分別位于87.5°E、110.5°E和142°E同步衛星軌位,在每一測站生成3600 s(步長1 s)的仿真數據,給定的偽距測量誤差服從均值為0,均方根(Standard Deviation,STD)為0.5 m的正態分布。根據上述仿真參數設置,可以求得高程輔助下的定位結果,這些地點的水平定位誤差分布繪于圖2。
由圖2可見,6個臺站的水平定位誤差呈橢圓分布,東西方向的定位精度總是優于南北方向,這與圖1的結論是一致的。根據EDOP和NDOP的定義,東西方向和南北方向的定位誤差的均方根(STD)除以偽距測量誤差(0.5 m),即對應于東西方向和南北方向的誤差放大倍數。在表1中,同時計算了EDOP和NDOP的理論數值與仿真結果進行了比較。
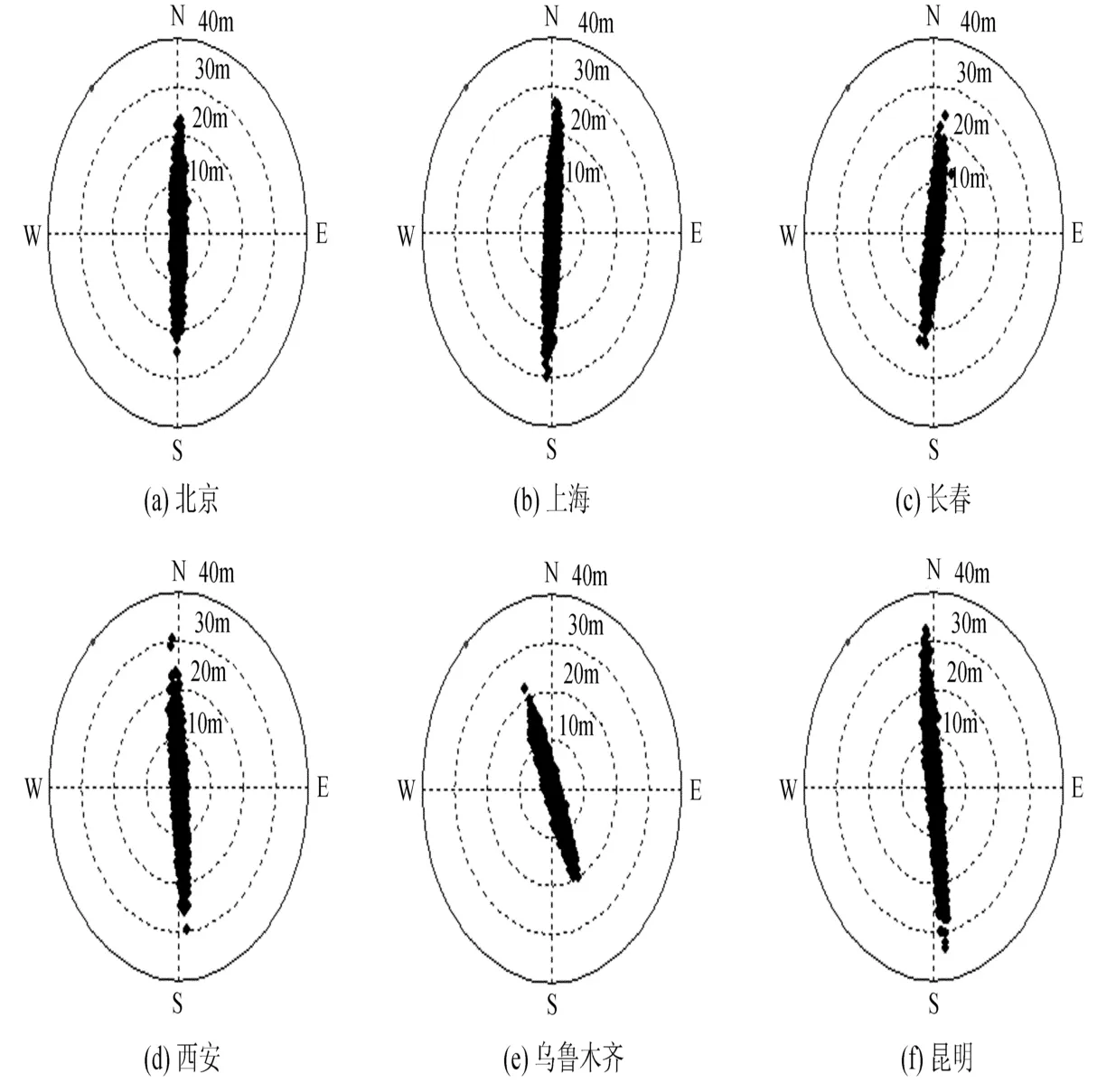
圖2 利用仿真數據得到的測站水平定位誤差分布Fig.2 Error distributions of horizontal positioning of various ground stations based on simulations of the CAPS test
從表1可以看出,EDOP和NDOP計算的理論值與仿真結果基本一致,說明可以用本文定義的EDOP和NDOP描述東西方向和南北方向的誤差放大倍數,再乘以偽距測量誤差可以得到這兩個方向上的定位精度。
2.3 實測數據分析
事實上,在CAPS試驗驗證階段,6臺測試用接收機已被安置在上述6個臺站,并實時采集測量數據。實測數據采集時間為2005年6月30日16:10到17:10,時間間隔為1 s。考慮到測試期間,該時間段內衛星無機動,衛星的軌道誤差很小;電離層效應、對流層效應則主要影響到定位偏差,在接收機內部沒有改正這些偏差。在分析實測數據時,為了清晰地展示定位誤差的橢圓分布特征,在定位結果中去掉定位偏差。圖3給出上述6個臺站在水平面內的定位誤差分布。
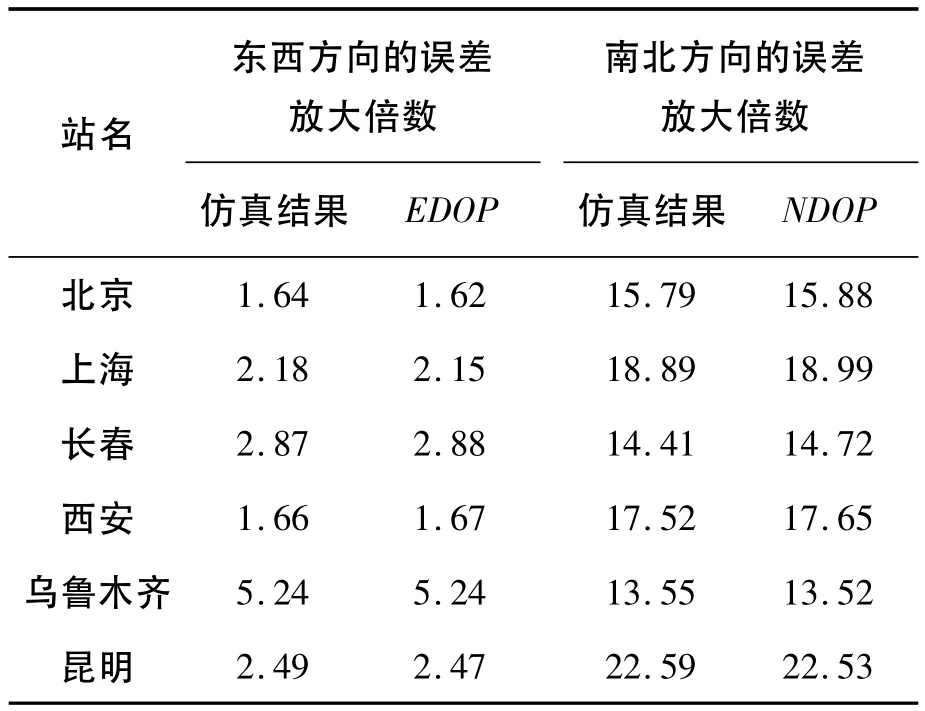
表1 仿真數據得到的誤差放大倍數和EDOP/NDOP理論比較Table 1 Comparison between simulated and theoretical error amplication factors for EDOP and NDOP
這里,利用實測數據也得到與仿真數據類似的誤差分布特征:6個臺站的定位誤差分布存在明顯的水平橢圓誤差分布,南北方向誤差大于東西方向誤差,定位誤差橢圓的半長軸與本地的南北方向夾角也與仿真結果相似。圖3中用戶在水平面內的定位誤差主要來源于接收機的測量噪聲。
為了便于和仿真數據做比較,計算了實測數據中南北方向和東西方向的定位誤差放大倍數的比值,結果列于表2。其中,第2列是利用表1中第5列除以第3列得到;第3列是利用表1中第4列除以第2列得到。
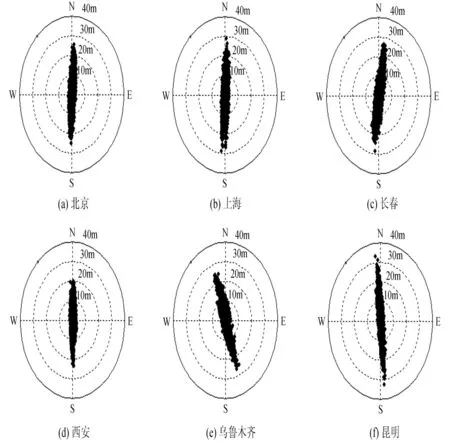
圖3 利用實測數據得到的測站水平定位誤差分布Fig.3 Error distribution of horizontal positioning of various ground stations based on observational data
由表2可以看出,由仿真數據得到的南北方向定位誤差與東西方向定位誤差的比值與理論計算的NDOP與EDOP的比值非常一致。由實測數據得到的南北方向定位與東西方向定位誤差比值與理論計算的NDOP與EDOP的比值比較接近,接近程度因測站不同有所差異。由于不同測站觀測GEO衛星的高度角不同,造成傳播路徑時延的復雜性和實測數據的復雜特征,從而導致在實測結果與仿真結果之間存在一定差異。仿真分析中,系統星座由同步軌道GEO衛星組成,衛星處于理想的赤道面內;在實測中,由于受到日月等攝動力的作用,GEO衛星并不嚴格處在赤道面上,因此,表2和表1中的NDOP/EDOP略有差別。
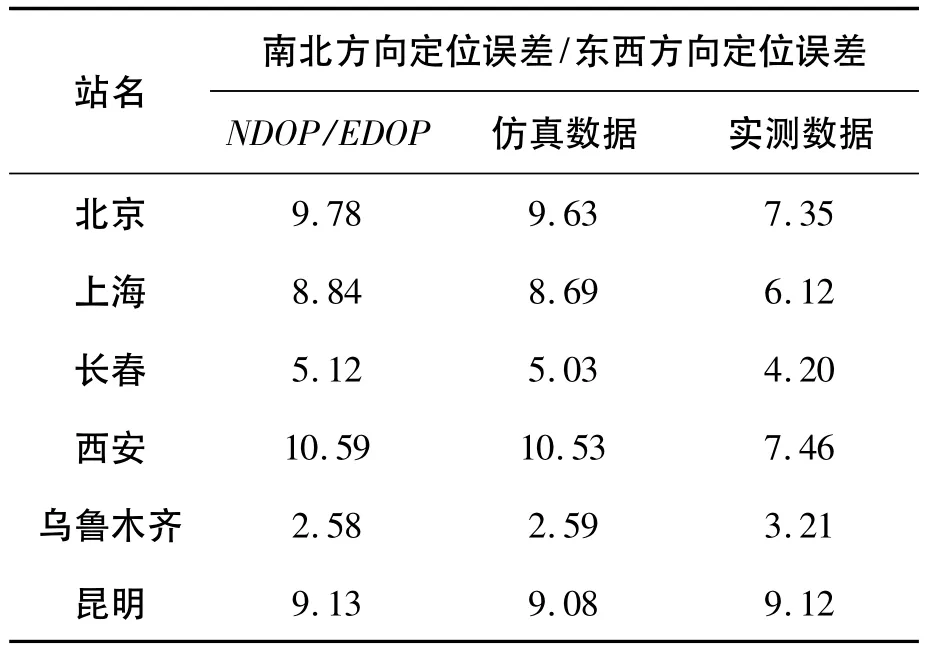
表2 南北方向定位誤差和東西方向定位誤差的比值Table 2 Ratios of NDOP/EDOP from theoretical calculations simulation and observations
3 結語
本文給出了高程輔助下的EDOP和NDOP的計算方法,該計算方法在計算精度衰減矩陣時,只考慮東西方向、南北方向和鐘差,不再考慮高程方向。通過對CAPS覆蓋范圍內高程輔助定位算法下EDOP和NDOP的計算表明,本文定義的EDOP和NDOP可以很好地解釋CAPS用戶接收機在高程輔助下水平定位精度東西方向總是優于南北方向的原因。通過對北京、上海、長春、西安、烏魯木齊和昆明6個測站仿真和實測數據分析表明,這兩個因子可以被用來描述東西方向和南北方向的誤差放大倍數,可以用來估算兩個方向上的定位精度,進而估算水平定位精度。
致謝:文中所用實測數據來源于CAPS臨潼導航主控站,在此表示感謝。
[1]艾國祥,施滸立,吳海濤,等.基于通信衛星的定位系統原理 [J].中國科學 (G輯):物理學 力學 天文學,2008,38(12):1615-1633.
[2]Ai Guoxiang,Shi Huli,Wu Haitao,et al.A positioning system based on communication satellites and the Chinese area positioning system(CAPS) [J].Chinese Journal of Astronomy and Astrophysics,2008,8(6):611-630.
[3]Ai Guoxiang,Sheng Peixuan,Du Jinlin,et al.Barometric altimetry system as virtual constellation applied in CAPS [J].Science in China Series G:Physics Mechanics and Astronomy,2009,52(3):376-383.
[4]Han Yanben,Ma Lihua,Qiao Qiyuan,et al.Selection of satellite constellation framework of CAPS[J].Science in China Series G:Physics Mechanics and Astronomy,2009,52(3):458-471.
[5]Kaplan E D,Hegarty C J.Understanding GPS:principle and application [M].Boston:Artech House,2006.
[6]謝鋼.GPS定位原理與接收機設計 [M].北京:電子工業出版社,2009.
[7]張麗榮.CAPS廣域差分方法研究 [D].北京:中國科學院研究生院,2008.
[8]張麗榮,馬利華,王曉嵐.CAPS氣壓測高的仿真分析[J].微計算機信息,2011,27(3):185-186.Zhang Lirong,Ma Lihua,Wang Xiaolan.Simulation analysis of CAPS barometric altimetry [J].Microcomputer Information,2011,27(3):185-186.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39
