九相電動機諧波轉矩研究
2012-01-22 01:14:12毛承雄段余平
大電機技術 2012年3期
方 晶,毛承雄,段余平,劉 榮,邱 軍
(1. 強電磁工程與新技術國家重點實驗室,湖北省電力安全與高效重點實驗室,華中科技大學電氣與電子工程學院,武漢 430074;2. 武漢鋼鐵(集團)公司,武漢 430074)
引言
多相電動機因其可靠性高,功率高等優(yōu)點,而廣泛應用于船舶推進、電動汽車、航空航天、核反應堆供水等場合。多相電動機驅動系統(tǒng)最常見的控制方式是SPWM控制,它可以對多相電動機進行變頻調速,起到節(jié)能作用,但它的輸出電壓中含有大量諧波,會引起多相電動機電磁轉矩的波動。目前有很多關于電動機電磁轉矩研究的文獻[1-3],但是很少看到有關考慮空間諧波磁勢影響的諧波電磁轉矩研究。其主要問題在于考慮空間諧波磁勢影響后,難以通過統(tǒng)一的數(shù)學表達式對諧波電磁轉矩進行計算。本文針對九相電動機進行研究,從電磁轉矩基本定義出發(fā),對考慮空間諧波磁勢影響的諧波電磁轉矩進行分析求解,推導出了諧波電磁轉矩的計算公式。本文所提出的諧波電磁轉矩計算方法為多相電動機轉矩分析提供理論依據(jù)。
1 九相電動機空間諧波磁勢分析
九相電動機驅動系統(tǒng)輸出的電壓為脈沖方波,用傅里葉級數(shù)對其進行分解,可得九相電壓表達式:

其中,Ui表示第i相電壓;i為0~8的整數(shù);Umn表示第n次諧波電壓幅值,n為奇數(shù);φ為相電壓初始相角。

其中,Isi表示第i相定子電流,i為 0~8的整數(shù),Ismn表示第n次定子諧波電流幅值,n為奇數(shù)自然數(shù),φs'為定子電流初始相角。
同理,九相轉子電流為:

根據(jù)文獻[4-8],假設相電流初始相角φs'=0,九相定子相電流產生的空間諧波磁勢為:

其中,fsi(t,α)表示第i相定子相電流產生的空間諧波磁勢,W1為每相每條支路串聯(lián)總匝數(shù),p為極對數(shù),α為空間電角度,ν為空間諧波次數(shù),n則為時間諧波次數(shù),Kwν為ν次空間諧波繞組系數(shù),由電動機設計參數(shù)決定,可以按式(5)計算:

其中,q為每極每相槽數(shù),α1為槽距角(機械角度),y為繞組短距比,(y1為節(jié)距,τ為極距,,Z為電動機總槽數(shù))。
從式(4)可以看出,在每相定子中,任何次數(shù)的定子諧波電流都將產生一系列的空間諧波磁勢。但對九相電動機而言,某一諧波電流產生的總磁勢并不包含所有奇次空間諧波磁勢,而是包含特定次數(shù)的空間諧波磁勢。設諧波電流次數(shù)為n,那么n次諧波電流產生的總磁勢只包含|18k±n|次空間諧波磁勢,其中k為整數(shù)。通過詳細的分析計算,可以歸納出九相電動機總磁勢為:

2 九相電動機諧波轉矩分析
對于電動機而言,電磁轉矩是由定子磁勢和轉子磁勢相互作用所產生的。根據(jù)文獻[9,10]可知,并不是所有次數(shù)的定子空間諧波磁勢和轉子空間諧波磁勢相互作用都產生電磁轉矩,只有空間諧波次數(shù)相同的定子磁勢和轉子磁勢相互作用會產生電磁轉矩。歸納起來有以下兩種情況:如果產生空間諧波磁勢的定子電流次數(shù)與轉子電流次數(shù)相同,則產生穩(wěn)定的電磁轉矩;如果產生空間諧波磁勢的定子電流次數(shù)和轉子電流次數(shù)不同,則產生脈動的電磁轉矩。其中,脈動轉矩在很多文獻都有過詳細的分析計算,本文只針對電磁轉矩進行分析計算。
基波電流產生的電磁轉矩通常采用參數(shù)表達式法求解,然而,該式?jīng)]有考慮空間諧波磁勢的影響,不適合計算空間諧波磁勢相互作用產生的電磁轉矩。當考慮空間諧波磁勢時,電磁轉矩的計算必須從其定義出發(fā)去求解。
邊境伏擊戰(zhàn)斗結束后,為了防止境外犯罪分子報復或不明真相人員的進一步糾纏,作戰(zhàn)部隊應迅速撤離現(xiàn)場。撤離前應清點人數(shù)、檢查武器彈藥和其他器材,確保沒有遺漏于現(xiàn)場的證據(jù)。必要時組織人員清查現(xiàn)場留下的作戰(zhàn)痕跡。撤回過程中,要注意行軍路線和行軍安全,看管好戰(zhàn)斗中捕獲的犯罪分子,回駐地后將犯罪分子交由公安機關或有關看管單位依法進行看押。
圖1為九相電動機定子轉子結構示意圖。為簡化分析計算,提出以下幾點假設:
(1)定子諧波電流產生的空間諧波磁勢在電動機內按如圖1所示的磁場均勻分布,其閉合磁鏈的長度為L;
(2)不考慮定子磁場的漏磁,忽略氣隙σ的漏磁,不考慮集膚效應;
(3)轉子繞組在定子磁場中的有效長度為l,計算轉矩時,忽略轉子繞組長度和氣隙寬度,電磁力的作用半徑為D/2,其中D為定子內圓半徑。
根據(jù)物理知識可知,磁勢與磁場強度之間存在以下關系:

其中,H為磁場強度,F(xiàn)為磁勢,L磁路的平均長度,即磁路中心線的長度。又由于磁場強度可以表示為:

其中,B為磁場強度,μ為磁導率。電磁力的表達式為:

其中,M為電磁力,l為導體在磁場中的有效長度,I為導體電流。將式(8)代入式(9)得

因此得電磁轉矩表達式為:

對于電磁轉矩,可以先按空間諧波磁勢次數(shù)分類,再按產生該空間諧波磁勢的諧波電流次數(shù)分類進行分析計算。以空間基波電磁轉矩為例,它是由(18n-17)次和(18n-1)次諧波電流產生的。當定子電流和轉子電流同為基波電流時,得

其中,F(xiàn)s1-1為定子基波電流產生的空間基波磁勢有效值,Ir1為折算到定子側轉子基波電流有效值。又因為:

因此,得

同理可以計算出定子電流和轉子電流同為17次諧波電流時產生的空間基波電磁轉矩:

由于17次諧波電流產生的空間基波電磁轉矩的轉向同基波電流產生的空間基波電磁轉矩的轉向相反,所以前面有個“-”號。
其余諧波電流產生的空間基波電磁轉矩可以依次類推,歸納得空間基波電磁轉矩為:

同理可以推導出其余空間諧波電磁轉矩,歸納得九相電動機電磁轉矩為:
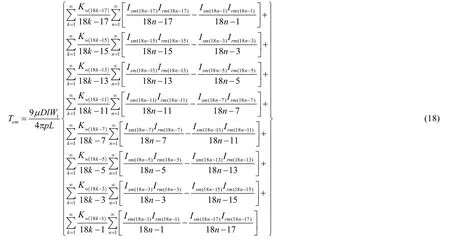
不難發(fā)現(xiàn),式(18)是一個單調減函數(shù),同時也可以看出,任意次諧波電流都會產生正轉和反轉兩種電磁轉矩,其中,反轉電磁轉矩對電動機是有害的,應該盡量消除或減小。
3 結論
本文針對九相電動機分析了諧波電流產生的空間諧波磁勢,為計算空間諧波磁勢產生的諧波電磁轉矩,提出了一種基于電磁轉矩定義的計算方法。通過詳細的計算,推導出了考慮空間諧波磁勢的電磁轉矩計算公式。所研究的電磁轉矩是對電動機運行產生作用的電磁轉矩,不同于脈動轉矩。可以看出,任意次諧波電流都會產生正轉和反轉兩種電磁轉矩,其中反轉電磁轉矩對電動機是有害的,應該盡量消除或減小。本文所提出的諧波電磁轉矩計算方法為多相電動機轉矩分析提供理論依據(jù),具有一定的指導意義。

圖1 九相電動機定子轉子結構示意圖
[1]Steve Williamson and Sandy Smith, Pulsating torque and losses in multiphase induction machines[J]. IEEE Transactions on Industry Applications, 2003, 39(4): 986-993.
[2]吳新振, 王祥珩, 羅成. 多相異步電機諧波電流與諧波磁勢的對應關系[J]. 清華大學學報(自然科學版), 2005, 45(7): 865-868.
[3]王鐵軍. 多相感應電動機的諧波問題研究[D].武漢: 華中科技大學, 2009.
[4]陳其工, 曹文田. 變頻調速諧波電流與諧波轉矩初步分析[J]. 山東師范大學學報(自然科學版),1996, 11(3): 30-33.
[5]陳其工. 變頻調速異步電機模型研究[J]. 微特電機, 1996(2): 2-4.
[6]陳其工, 變頻運行感應電動機諧波電流計算與轉矩、損耗分析[J]. 微特電機, 1999(3): 33-35.
[7]陳其工, 計算與抑制變頻調速異步電動機穩(wěn)態(tài)諧波電流與轉矩的方法[J]. 電子科技大學學報,1999, 28(2): 148-151.
[8]辜承林, 陳喬夫, 熊永前. 電機學[M]. 武漢: 華中科技大學出版社, 2001.
[9]張晟, 余海濤, 陳小林. SPWM 型逆變器驅動感應電機電壓諧波分析和脈動轉矩仿真[J]. 自動化與儀器儀表, 2008(4): 83-84.
[10]王祥珩, 史文華, 高景德, 黎道成. 交流勵磁電機的諧波分析[J]. 電機與控制學報, 1997, 1(1):22-27.
