倒立擺系統(tǒng)的智能控制算法研究
2012-01-15 06:02:50焦靈俠
電子設(shè)計(jì)工程 2012年15期
焦靈俠
(西安工業(yè)大學(xué) 北方信息工程學(xué)院,陜西 西安 710032)
倒立擺系統(tǒng)是一個(gè)典型的被控對(duì)象,用于檢驗(yàn)各種控制算法,其本身是一個(gè)非線(xiàn)性、強(qiáng)耦合、多變量、自然狀態(tài)下不穩(wěn)定的系統(tǒng)。在控制過(guò)程中能有效地反映控制過(guò)程中的許多關(guān)鍵問(wèn)題如非線(xiàn)性問(wèn)題、系統(tǒng)的魯棒性問(wèn)題、隨動(dòng)問(wèn)題、鎮(zhèn)定問(wèn)題及跟蹤問(wèn)題等。倒立擺在控制理論研究中是一種較為理想的實(shí)驗(yàn)裝置。倒立擺系統(tǒng)與機(jī)器人的站立和行走、通信衛(wèi)星的實(shí)時(shí)穩(wěn)定等有很大的相似性,對(duì)倒立擺系統(tǒng)的研究具有重要的理論和實(shí)際意義。
1 二級(jí)倒立擺系統(tǒng)數(shù)學(xué)模型的建立
在忽略了空氣阻力和各種摩擦,并認(rèn)為擺桿為剛體。二級(jí)倒立擺[1]示意圖如圖1所示。

圖1 二級(jí)倒立擺示意圖Fig.1 Two-stage pendulum schematic diagram
系統(tǒng)的動(dòng)能:

倒立擺參數(shù)定義如下:
m1擺桿1的質(zhì)量 0.05 kg
m2擺桿2的質(zhì)量 0.13 kg
m3擺桿3的質(zhì)量 0.236 kg
M小車(chē)質(zhì)量 0.584 kg
g重力加速度 9.8 m/s2
l1擺桿1中心到轉(zhuǎn)動(dòng)中心的距離 0.077 5 m
l2擺桿2中心到轉(zhuǎn)動(dòng)中心的距離 0.25 m
F作用在系統(tǒng)上的外力 N
θ1擺桿1與豎直方向的夾角 rad
θ2擺桿1與豎直方向的夾角 rad

其中T為系統(tǒng)的動(dòng)能,V為系統(tǒng)的勢(shì)能,L為拉格朗日算子,q為系統(tǒng)的廣義坐標(biāo)。i=1,2,3…,fi為系統(tǒng)在第i個(gè)廣義坐標(biāo)上的外力。在二級(jí)倒立擺系統(tǒng)中,系統(tǒng)的廣義坐標(biāo)有3個(gè),分別為 x,θ1,θ2。
其中 TM,Tm1,Tm2,Tm3分別為小車(chē)的動(dòng)能, 擺桿 1的動(dòng)能,擺桿2的動(dòng)能和質(zhì)量塊的動(dòng)能。
擺桿1的動(dòng)能:Tm1=T′m1+T′m2
其中T′m1,T′m2分別為擺桿1的平動(dòng)動(dòng)能和轉(zhuǎn)動(dòng)動(dòng)能。
擺桿2的動(dòng)能:Tm2=T′m1+T″m2
其中T′m2,T′m2分別為擺桿2的平動(dòng)動(dòng)能和轉(zhuǎn)動(dòng)動(dòng)能。

系統(tǒng)的動(dòng)能為:

系統(tǒng)的勢(shì)能為:

由于系統(tǒng)在θ1,θ2廣義坐標(biāo)下沒(méi)有外力作用,所以由拉格朗日方程得:
將其在平衡位置附近進(jìn)行泰勒級(jí)數(shù)展開(kāi),并線(xiàn)性化,代入?yún)?shù)值:

則系統(tǒng)的狀態(tài)方程為:

2 倒立擺系統(tǒng)模糊控制器的設(shè)計(jì)
采用的控制思想是將一個(gè)復(fù)雜的多輸入/單輸出的模糊控制器,分解成簡(jiǎn)單的多輸入/單輸出的模糊控制器[2]。控制器的輸入為控制變量與給定值的偏差和偏差的變化,該方法能夠較嚴(yán)格的反映控制系統(tǒng)中輸出變量的動(dòng)態(tài)特性,且控制方法簡(jiǎn)單,控制時(shí)能及時(shí)發(fā)現(xiàn)問(wèn)題,對(duì)分別控制小車(chē)和擺桿有很大作用。
2.1 模糊控制器的降維
若輸入變量采用常規(guī)的控制變量與給定值的偏差和偏差的變化,模糊控制器輸入就有6個(gè),每個(gè)變量定義6個(gè)模糊子集,模糊控制規(guī)則最多有66個(gè),不利于規(guī)則的完整制定,將引起“規(guī)則爆炸”問(wèn)題,所以需要對(duì)輸入變量進(jìn)行降維。
本章是用模糊控制和最優(yōu)控制相結(jié)合的方法來(lái)實(shí)現(xiàn)模糊控制器的降維,使其變成二維模糊控制器[5]。把小車(chē)的位移、上擺的擺角、下擺的擺角綜合成一個(gè)變量E,將小車(chē)的速度、上擺的角速度、下擺的角速度綜合成另一個(gè)變量EC,E和EC作為模糊控制器的輸入,電機(jī)輸出的控制力u作為輸出,由此可以設(shè)計(jì)一個(gè)二維模糊控制器。
首先利用最優(yōu)控制中的線(xiàn)性二次型最優(yōu)調(diào)節(jié)器控制原理求得最佳狀態(tài)反饋控制向量的矩陣,即反饋矩陣K:

系統(tǒng)的狀態(tài)向量為:

對(duì)于二級(jí)倒立擺系統(tǒng),上擺桿即擺桿2的控制難度最大,分別選擇 θ2、θ˙2為控制主元,對(duì)應(yīng)的系數(shù)記為:kθ=kθ2,kθ˙=kθ˙2
融合函數(shù)的輸出向量記為:

融合函數(shù)的輸出方程為:
通過(guò)把多個(gè)輸入變量降維,得到了綜合誤差E和綜合誤差率EC:

通過(guò)信息融合的方法,將二級(jí)倒立擺系統(tǒng)的6個(gè)輸入變量化為2個(gè)輸入變量,減少了模糊控制器的輸入,實(shí)現(xiàn)了控制器的降維。
根據(jù)二級(jí)倒立擺模型的參數(shù),基于MATLAB強(qiáng)大的矩陣運(yùn)算功能[3],可以利用命令 K=lqr(A,B,Q,R),得到反饋矩陣K:

由此得到綜合誤差E和綜合誤差變化率EC。

2.2 模糊控制器的設(shè)計(jì)
1)確定輸入變量和輸出變量
E和EC作為輸入變量,u作為輸出變量
2)E、EC、u 隸屬度函數(shù)的設(shè)計(jì)

圖2 E和EC隸屬度函數(shù)曲線(xiàn)Fig.2 Membership function curves of E and EC

圖3 u的隸屬度函數(shù)曲線(xiàn)Fig.3 Membership function curves of u
3)模糊推理
采用Mamdani最小運(yùn)算規(guī)則。
4)模糊控制規(guī)則
根據(jù)輸入/輸出論域上的模糊語(yǔ)言變量劃分NB(負(fù)大),NM(負(fù)中),NS(負(fù)小),ZO(零),PS(正小),PM(正中),PB(正大),設(shè)計(jì)模糊推理規(guī)則如表1所示。

表1 模糊控制規(guī)則Tab.1 Rules of fuzzy control
5)解模糊
重心法。
3 仿 真
二級(jí)倒立擺系統(tǒng)Simulink仿真模型如圖4所示。
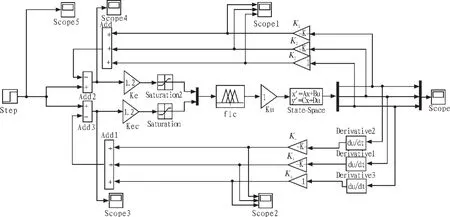
圖4 二級(jí)倒立擺系統(tǒng)simulink仿真模型Fig.4 Simulation model of two-stage pendulum
二級(jí)倒立擺系統(tǒng)仿真曲線(xiàn)如圖5所示。
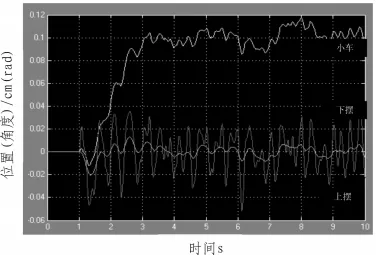
圖5 二級(jí)倒立擺系統(tǒng)仿真曲線(xiàn)Fig.5 Simulation curve of two-stage pendulum
4 結(jié) 論
通過(guò)設(shè)計(jì)融合函數(shù)實(shí)現(xiàn)了二級(jí)倒立擺模糊控制器的降維,成功解決了模糊“規(guī)則爆炸”問(wèn)題。同時(shí)建立了二級(jí)倒立擺系統(tǒng)仿真模型,仿真效果較好。
最優(yōu)控制與模糊控制相結(jié)合的方法可以實(shí)現(xiàn)二級(jí)倒立擺的模糊控制,控制效果良好,結(jié)果表明模糊控制能夠使倒立擺系統(tǒng)穩(wěn)定且具有一定的抗干擾性能。
[1]李洪興,王加銀,苗志宏.模糊控制系統(tǒng)的建模[J].中國(guó)科學(xué)(A輯)2002,32(9):772-781.LI Hong-xing,WANG Jia-yin,MIAO Zhi-hong.Modeling of fuzzy control system[J].Science in China (Series A) 2002,32(9):772-781.
[2]阮治明.二級(jí)倒立擺系統(tǒng)的最佳控制[J].兵工自動(dòng)化,2006,25(1):60-63.RUAN Zhi-ming.Optimalcontrolofdouble inverted pendulum system[J].Ordnance Industry Automation,2006,25(1):60-63.
[3]瞿亮.基于MATLAB的控制系統(tǒng)計(jì)算機(jī)仿真[M].北京:北方交通大學(xué)出版社,1998.
[4]席愛(ài)民.模糊控制技術(shù)[M].西安:西安電子科技大學(xué)出版社,2008.
[5]王仲民,孫建軍,岳宏.基于LQR的倒立擺最優(yōu)控制系統(tǒng)研究[J].工業(yè)儀表與自動(dòng)化裝置,2005(3):6-9.WANG Zhong-min,SUN Jian-jun,YUE Hong.Based on the LQR optimalcontrolofinverted pendulum system[J].Industrial Instrumentation&Automation,2005(3):6-9.
[6]唐新宇.倒擺問(wèn)題的研究及控制器設(shè)計(jì)[J].天津工業(yè)大學(xué),2003,19(4):65-67.TANG Xin-yu.Stady of the inverted pendulum problem and designing of the controller[J].Tianjin Industrial University,2003,19(4):65-67.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小獼猴智力畫(huà)刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
