推力器失效形式對DP-2級動力定位系統最優作業方向影響
2012-01-08 04:59:32劉翰林
海洋工程 2012年2期
劉翰林,王 磊,閆 芳
(上海交通大學海洋工程國家重點實驗室,上海 200240)
推力器失效形式對DP-2級動力定位系統最優作業方向影響
劉翰林,王 磊,閆 芳
(上海交通大學海洋工程國家重點實驗室,上海 200240)
以3 000 m水深DP-2級動力定位半潛平臺為算例,研究在風浪流同向作用下,平臺在各個角度下所能抵抗的最大外界環境力,得到最優作業方向。在此角度下,著重分析當不同推力器失效時,對動力定位能力的影響。得到一般規律,并推廣到一般平臺。
動力定位;半潛平臺;定位能力;推力器失效
動力定位系統是使海上浮動結構物利用其自身動力抵御海上風、浪、流的影響,自動保持于設定位置和方位的一項技術[1]。其基本構成有測位系統、控制系統及推力裝置[2]。鑒于動力定位系統在實際工作過程中存在一個甚至多個推力器失效的可能,要考慮這種情況下對定位能力的影響。深水半潛平臺動力定位能力分析涉及到的理論計算主要包括兩部分,王亮[3]對動力定位能力曲線進行過系統的分析與計算;李勇躍[4]則從時域模擬的角度對平臺定位能力及最優方向進行了研究。Ayman B Mahfouz[5-6]曾利用定位能力曲線圖對船體及平臺進行定位能力的分析,但并未考慮推進器失效的情況。以在風浪流載荷作用下3 000 m水深DP-2級動力定位半潛平臺為算例,進行動態模擬,繪出定位能力曲線圖,首先模擬所有推力器正常工作的情況得到定位能力的最佳方向,這里的最佳作業方向是指抵抗外界環境力最大的方向。在此DP-2級系統分析中,只考慮存在一個推力器停止工作的失效形式。最終得到不同推力器失效形式對最優作業方向的影響,為實際工程提供理論依據。
1 外載荷理論計算
1.1 風載荷研究
風載荷采用模塊法(building block method)進行計算[7]。
結構的總載荷:

式中:Cqi為影響修正系數,計及了風場的影響、構件間的相互影響等。
風力矩:

式中:L為力作用點與重心之間距離。
1.2 流載荷研究
流載荷的計算方法與風載荷相同,同樣采用模塊法計算。需要考慮的組成構件包括:4根立柱的水下部分(長方體模塊),2個浮靴(下浮體模塊),計算中考慮推進器的存在的影響。
作用在浮體上的流力:

流力矩:

式中:V為流相對于附體運動的相對流速;ρw為流體密度;A為附體在流速方向上的投影面積;Cdc為阻力系數;L為力作用點到重心距離。
1.3 二階波浪漂移力研究
二階波浪力計算采用近場積分理論。先利用三維源匯法基于物面的壓力和力矩積分,在頻域中計算出在任一給定波浪遭遇角的二階傳遞函數P(ω1,ω2),Q(ω1,ω2)[8]。在應用Fourier變換把二階傳遞函數轉化為二次脈沖響應函數 g(τ1,τ2):

結合給定波浪時歷ζ(t),則二階波浪漂移力的時歷可由下式計算得到:

2 動力定位能力計算
2.1 定位能力計算要求
動力定位能力指在給定的環境運轉條件下一艘動力定位平臺保持位置的能力。考慮到風浪流條件的復雜性,認為三種載荷從同一方向作用,波浪條件在某一特定海域與風速又存在一定關系,所以動力定位能力分析的結果體現為在不同角度下所能承受的最大風速。
有關國際組織對動力定位能力曲線的計算都制定了各自的規定或指導方法,計算要求相似,具體可參考國際標準《石油和天然氣工業海上建筑物的特殊要求》第7部分:《浮動式海上建筑物和移動式海上設備的定位系統》(標準號:ISO 19901-7-2005)[9];美國石油協會(API)的RP 2SK部分《浮式結構定位系統設計和分析的推薦作法》[10]以及國際海事承包商協會(IMCA)的建議《動力定位能力曲線說明書》[11]。
動力定位能力曲線是通過在極坐標上一條從0°到360°的封閉包絡曲線表達船體在指定推力系統參數及指定環境條件下的動力定位能力,通過船體能抵抗的最大環境條件來衡量。定位包絡曲線上任意一點的角度坐標表示環境條件相對船體的來向,半徑坐標表示該方向上船體所能保持定位的最大環境條件,通過最大風速衡量。其目的就是計算動力定位系統所產生的推力在各個方向上所能夠抵抗的最大環境載荷。
2.2 定位能力計算流程
在建立環境載荷作用和推力產生的模型后,可以按圖1所示的步驟進行定位能力曲線的計算。
選擇一定風向間隔進行計算,如風向角每次增加5°,對各個風向角都重復上述過程,直到找到0°到360°之間所有風向角的最大風速,最后便可根據各個角度上計算得到的最大風速繪制出一條限制風速包絡曲線,即是所謂的動力定位能力曲線[12]。
3 計算實例分析
3.1 平臺及動力定位參數
3 000 m水深半潛鉆井平臺主要組成部件包括:下附體2個、柱形連接構件2個、立柱4根、主甲板、箱型甲板、居住艙樓、井架臺、井架、起重機、直升機平臺等。平臺主要參數見表1。動力定位系統中推力器采用8個方位推進器并裝配導管,推進器參數見表2,布置見圖2所示。
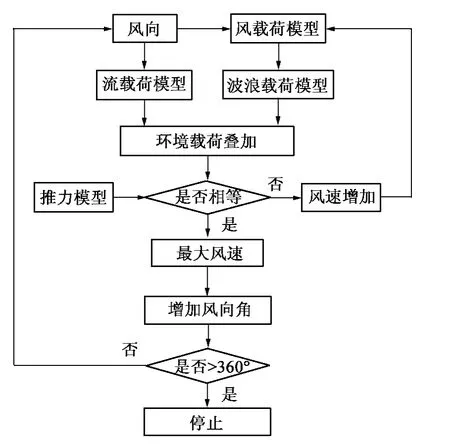
圖1 動力定位能力曲線計算流程Fig.1 Calculation flow diagram of dynamic positioning capability curve
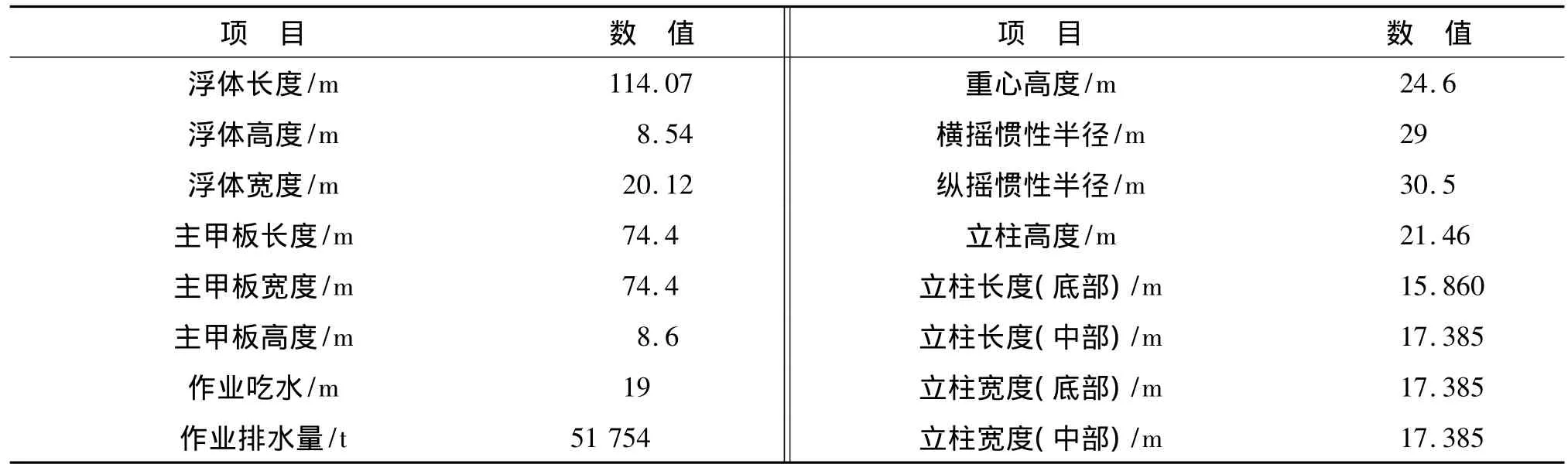
表1 平臺主尺度Tab.1 Main parameters of semi-submersible platform
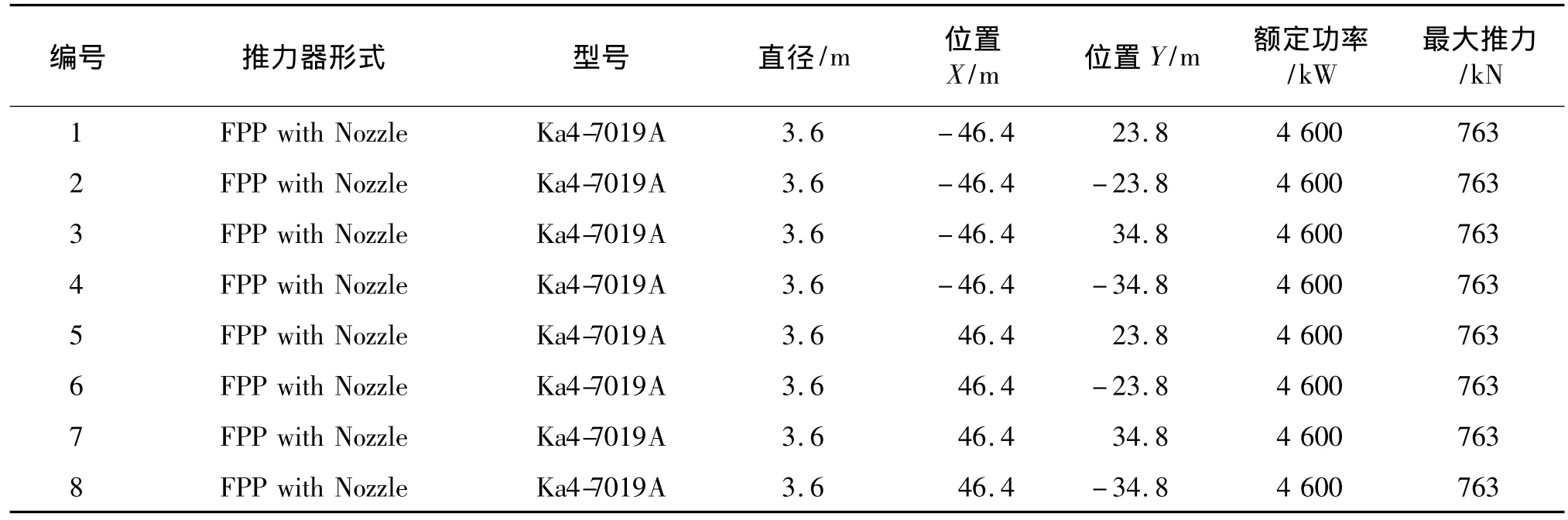
表2 推力器參數Tab.2 Main parameters of thruster
在螺旋槳工作時將禁止角上下限設為15°[13],推力冗余為20%。另外,由于平臺的動力定位系統達到DP-2級別,所以計算過程中只要考慮最多有一個推力器停止工作的不同失效形式[14]。一組完整工況參數全部確定后,便可計算在該工況條件下的定位能力曲線,以每5°風向為間隔計算得到結果。
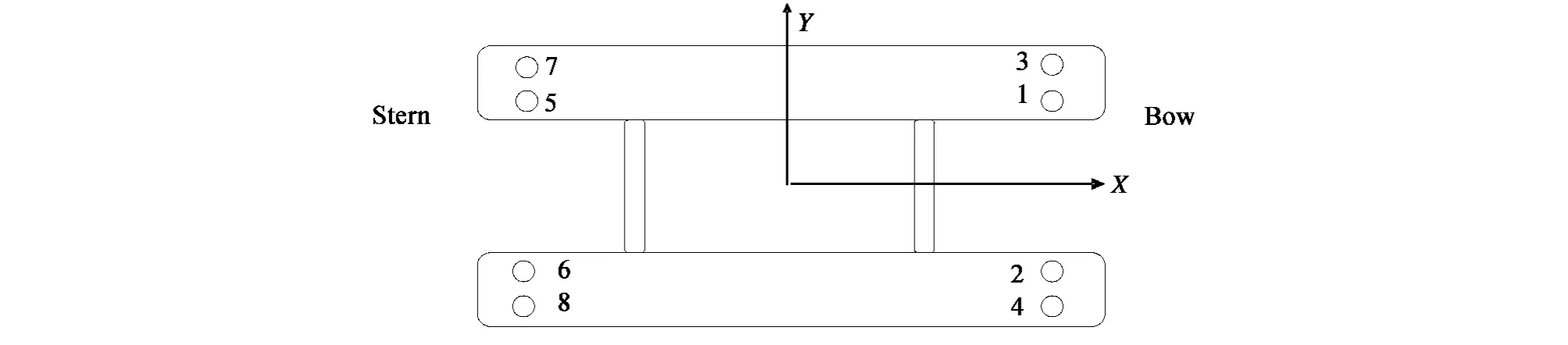
圖2 推力器布置示意Fig.2 layout of thrusters
3.2 計算海況
計算海洋環境要素見表3。

表3 海洋環境條件Tab.3 Environment condition
由平臺結構的布置對稱的情況及外界環境力的特點可知,對于定位能力而言,2號與1號、4號與3號、5號與6號、7號與8號失效為等效。故這里只展示不同的5種工況。
3.3 定位能力及結果
從數據中可知,當風浪流的方向為10°時,得到最優作業方向,推力器產生推力及角度見表4。
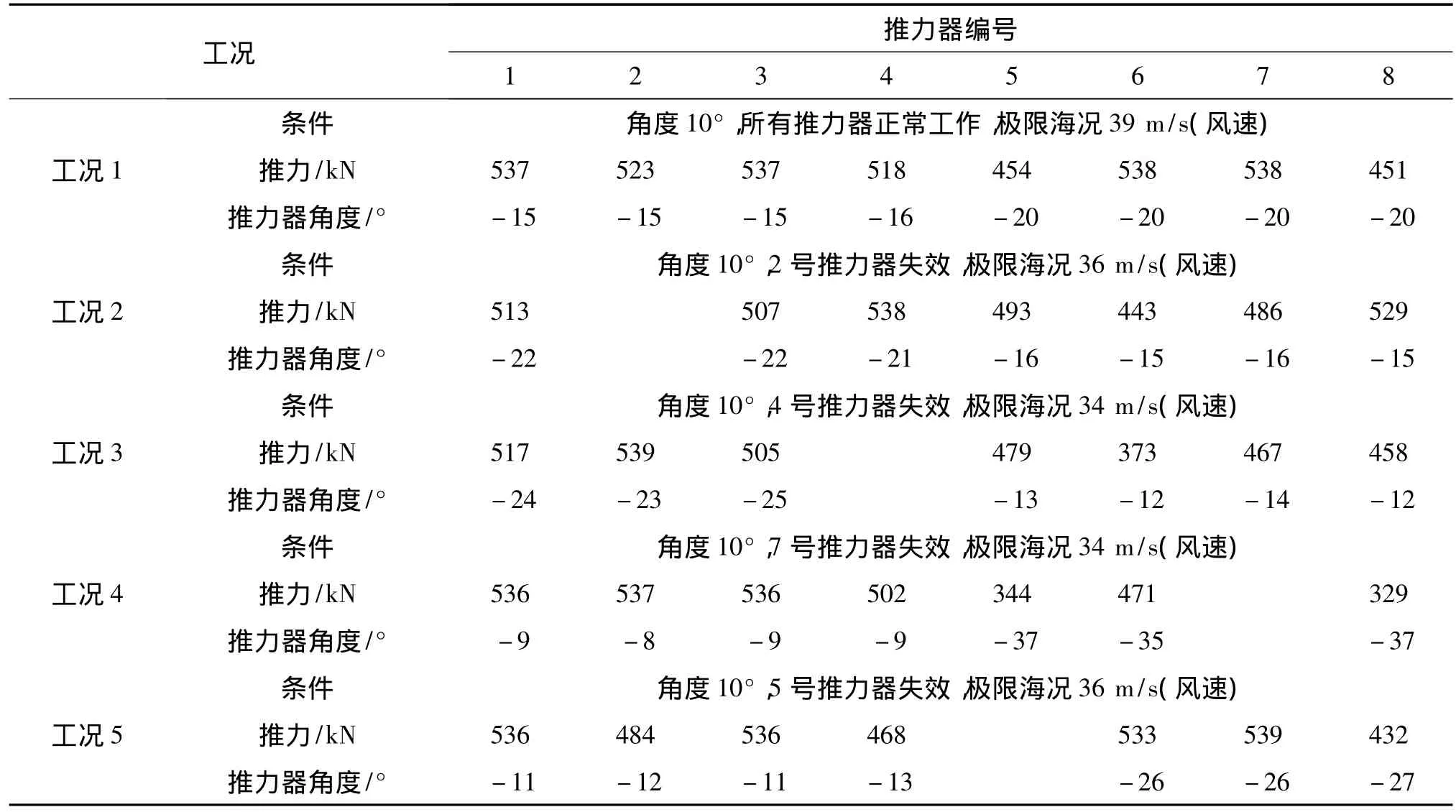
表4 5種工況下推力器產生的推力和角度Tab.4 Thrust and angle of each thruster in the five conditions
3.4 計算結果分析
根據定位能力曲線及相關數據值(見圖3)可得出如下結論:
1)所有推力器正常工作情況下,得到平臺所能承受的極限海況方向為10°即風浪流方向與平臺艏向角的夾角為10°,在此角度下可以抵抗最大的外界環境力,故為平臺的最優作業方向。而非0°方向(迎向風浪流方向),雖然此角度可以產生最大的推力抵抗環境力,然而要保持平臺的位置,不僅要顧及外界環境力的影響,還要考慮對所產生力矩的抵抗作用。
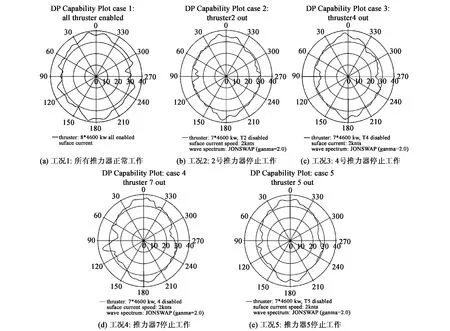
圖3 5種工況下定位能力曲線Fig.3 Positioning capability curres in the five conditions
2)當風浪流方向為10°時,通過讀取各個工況的推力器工作角度可知,與外界環境力方向的最大夾角不超過30°,說明所有推力器產生推力的角度基本迎向外界環境力方向,推力器使用效率更高,功率消耗更小,是推力器的最佳工作方向。
3)在一個推力器失效的情況下,通過比較平臺所能抵抗的極限海況值可知,當4或7推力器停止工作時,對定位能力的影響最為顯著,根據工況1(推力器全好)的數據,4號,7號推力器產生的推力分別為518 kN和538 kN,雖然4號分配的推力并不是所有推進器中最大的,但是由于外界風浪流方向為10°,所以4號推力器處于平臺的最外側,推力的作用距離最長,所以4號推力器產生的力矩對保持平臺艏向角不變具有最為重要作用。7號推力器同時提供最大的推力與力矩,此處對力矩的考慮意義要大于對力的考慮。所以在外界環境力的方向為10°時,4號、7號失效,平臺所能承受的極限風速下降幅度最大。
4)通過觀察動力定位能力曲線圖并綜合分析各個工況的數據,雖然當有推力器停止工作時,平臺所抵抗的極限海況方向不是10°即存在推力器失效的情況下,最優作業方向不再是10°,但是,在此角度下,平臺所抵抗的外界環境力仍然很大,具有優良定位能力。再次說明了,無論有無推力器失效,最優作業方向應設為 10°。
4 結語
通過對3 000 m水深半潛平臺定位能力的計算分析,可以得到平臺抵抗的最大外界環境力的方向。并主要研究了在最優作業方向上,當存在單個推力器失效的情況下,對定位能力的影響大小,進而得出當4號,7號推力器失效時,平臺所能抵抗的外界環境力最小,定位能力最差。推廣到一般的平臺,在工作方向上,當平臺最外側的推進器所提供的力矩對保持平臺的定位能力具有更為重要的作用。因此,在平臺實際工作時,對平臺外側的推進器更加予以重視,盡可能保證其正常工作。值得注意的是,這里所得到的結果僅僅是在提供的計算條件下得到的,如計算條件或計算模型發生變化,結果會相應發生變化,只是提供了處理此類問題的方法。
[1]趙志高,楊建民,王 磊,等.動力定位系統發展狀況研究方法[J].海洋工程,2002,20(1):91-97.
[2]王 亮.深海半潛式鉆井平臺動力定位能力分析[D].上海:上海交通大學,2010.
[3]李永躍,王 磊,孫 攀.深水半潛式鉆井平臺動力定位最有作業方向研究[J].海洋工程,2011,29(1):26-31.
[4]Ayman B Mahfouz,Hussein W EI-Tahan.On the use of the capability polar plots program for dynamic positioning systems for marine vessels[J].Ocean Engineering,2006,33(8-9):1070-1089.
[5]Ayman B Mahfouz.Predicting the capability-polar-plots for dynamic positioning systems for offshore platforms using artificial neural networks[J].Ocean Engineering,2007,34:1151-1163.
[6]高 捷,譚家華.浮式生產儲油輪動力定位功率計算[J].上海交通大學學報,1996,30(10):53-57.
[7]王先福,楊建民,王 磊.海上浮體動力定位外力計算[J].海洋工程,2005,23(3):45-50.
[8]周 利.半潛鉆井平臺動力定位理論及模型試驗研究[D].上海:上海交通大學,2009.
[9]ISO 19901-7:2005,Petroleum and natural gas industries-Specific requirements for offshore structures-Part 7:Stationkeeping systems for floating offshore structures and mobile offshore units[S].2005.
[10]American Petroleum Institute(API),Analysis of spread mooring systems for floating drilling units.Recommended practice RP 2P-87,seconded[S].1987.
[11]The International Marine Contractors Association.Specification for DP Capability Plots[M].IMCAM 140 Rev.,2000.
[12]MARIN.DpMaster-DPCAP軟件用戶手冊[S].
[13]楊世知,陸耀輝,王 磊.動力定位推進系統中槳-槳干擾研究進展[J].實驗室研究與探索,2009,28(11):17-24.
[14]中國船級社.鋼質海船入級規范[S].2006.
The effect of thruster failure on the optimal operational direction of DP-2 dynamic positioning system
LIU Han-lin,WANG Lei,YAN Fang
(State Key Lab of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200240,China)
Taking a semi-submersible platform with a DP-2 dynamic positioning system working in 3000m depth water as an example,a research is taken on the maximum force of external environment,in which a platform can resist at various angles with the same direction of wind wave and current,and then an optimal operational direction is obtained.An analysis is made on the impact of different thruster failure on the dynamic positioning capability.Finally,a general discipline is obtained and can be extended to common platforms.
dynamic positioning;semi-submersible platform;positioning capability;thruster failure
P751;TK89
A
1005-9865(2012)02-0110-06
2011-07-15
工信部高技術船舶科研項目“深海半潛式鉆井平臺工程開發”
劉翰林(1987-),男,黑龍江哈爾濱人,碩士生,主要從事動力定位系統研究。
王 磊。E-mail:wanglei@sjtu.edu.cn
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
計算機應用(2022年2期)2022-03-01 12:33:42
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14