油茶果采摘機工作空間的分析及優化
2012-01-04 09:25:32左二兵李立君高自成劉銀輝
中南林業科技大學學報 2012年5期
左二兵,李立君,高自成,劉銀輝,李 昕
(中南林業科技大學 機電工程學院, 湖南 長沙 410004)
油茶果采摘機工作空間的分析及優化
左二兵,李立君,高自成,劉銀輝,李 昕
(中南林業科技大學 機電工程學院, 湖南 長沙 410004)
油茶果采摘機是工作在非結構環境下的機械系統,結合油茶樹的生物學特性和栽培方式等因素,利用邊界法求解采摘機執行機構的工作空間,建立以滿足采摘機作業空間最小、各臂臂長之和最小為優化目標,得到優化后的執行機構結構參數;在求出執行機構位移正解的基礎上,基于matlab蒙羅卡洛法對采摘機的工作空間進行仿真與分析,驗證了采摘機結構參數設計的合理性。
采摘機;工作空間優化;蒙羅卡洛法;仿真分析
油茶果采摘作業是油茶生產最重要的環節之一,季節性強,勞動強度大。隨著我國人口老年化的加劇和農村勞動力的不斷減少,研究開發油茶林果采摘機具有重大意義[1]。油茶果采摘機工作空間是指其執行機構末端所能達到的空間點的集合,工作空間的大小代表了采摘機的活動范圍[2],采摘機執行機構如圖1所示,圖中各點表示執行機構各節點位置。根據采摘機執行機構的結構分析,為實現采摘作業在空間的任意位置,需要6個自由度,一般設計成二個連桿系統。前三個自由度構成的連桿組成主連桿系統,又稱為“手臂”,尺寸較長,主要用來確定末端的空間位置;后三個自由度構成的連桿系統尺寸較小,主要用來調整姿態。根據國家標準,工作空間主要由主連桿的幾何參數決定。因此,油茶果采摘機的工作空間優化及分析實際上是分析執行機構幾何尺寸和各關節范圍,而且為了更好的滿足采摘作業的要求,尺寸盡可能小[3-5]。
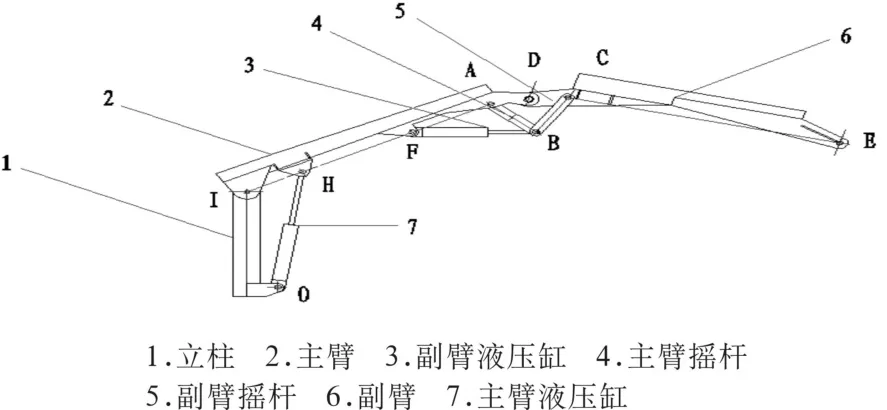
圖1 采摘機執行機構Fig. 1 Actuator of picking machine
1 工作空間的確定
1.1 油茶果分布空間的確定
油茶果的分布如圖2所示。根據對油茶林基地的實地考察,油茶果樹高度一般為2 800~3 200 mm,樹冠直徑在4 500 mm左右,油茶果分布在300~3 000 mm之間,約80%的油茶果分布在油茶樹的表面。為簡化空間綜合問題,確定油茶果的分布空間為4 500 mm×4 500 mm×2 700 mm。
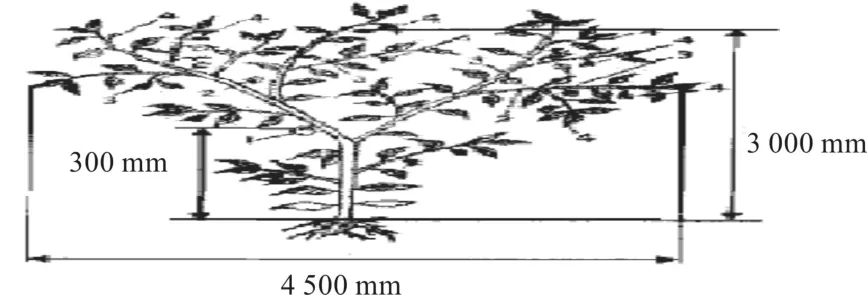
圖2 油茶果的分布Fig. 2 Camellia fruit distribution
1.2 采摘機工作空間的求解
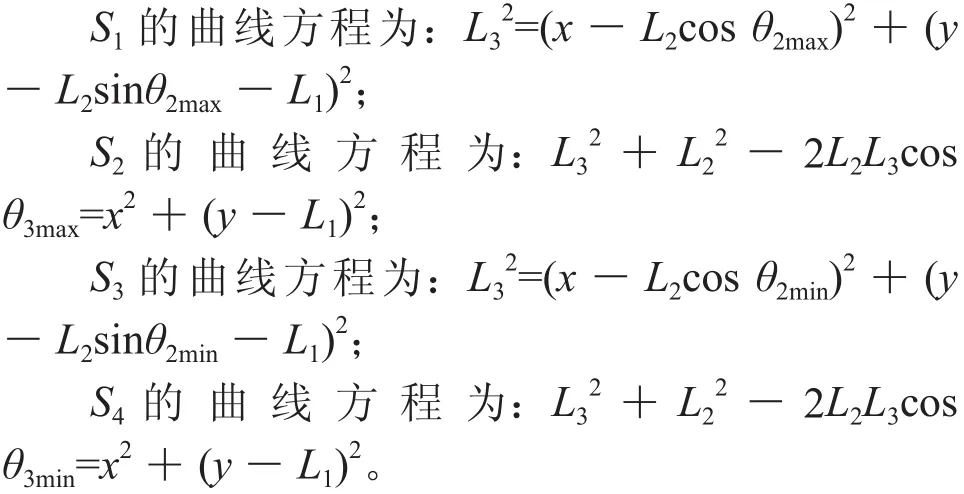
本研究的采摘臂自由度較少,因此采用圖解法和數值法相結合的形式來求解采摘臂的工作空間。采用固定一個限制角的分段作圖法作出采摘臂末端E點在XOY面的工作空間圖,如圖3所示。工作空間邊界由4條曲線S1、S2、S3和S4組成。
根據油茶果的分布圖,確定所要求的工作空間為4 500 mm×4 500 mm×3 000 mm的立方體。通過分析可知,工作空間內滿足油茶果的分布空間圖問題可以轉化為平面內b×h的問題,如圖4所示。因為在滿足b×h之后,立柱需要繞Y軸旋轉相應的θ1角度,就能實現要求的工作空間問題。因此,只需要研究執行機構工作空間滿足b×h的矩形問題,就可以完成采摘機工作空間的優化問題。
2 工作空間的優化
2.1 設計變量的確定
設計變量包括立柱高L1,主臂L2,副臂L3,主臂轉角θ2,副臂轉角θ3,即:
X=[L1,L2,L3,θ2min,θ2max,θ3min,θ3max]=[x1,x2,x3,x4,x5,x6,x7]。
圖3 工作空間邊界Fig. 3 Working space boundary
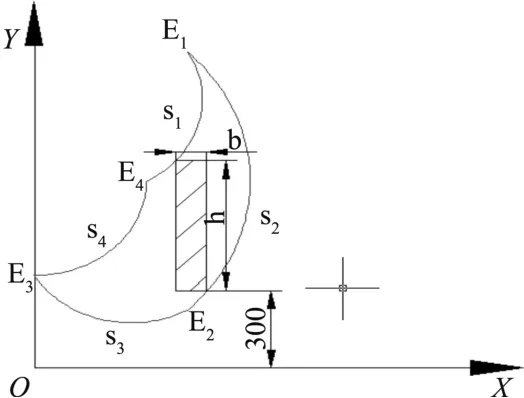
圖4 工作空間位置Fig. 4 Working space location
2.2 數學模型的建立
恰當的數學模型的建立是優化設計的關鍵步驟。采摘機的數學模型包括兩部分內容:第一是建立目標函數的數學模型;第二是建立優化時的約束條件。數學模型的建立,應既要保證設計變量所有一定的可行域,又要保證機構的每一方面都有合理的要求。
2.2.1 目標函數的確定
目標函數1:在滿足作業要求的情況下,要求采摘臂結構最輕,采摘臂各臂的長度尺寸之和應為最小,即目標函數為:

目標函數2:采摘臂的工作空間S與油茶果采摘臂所要求的空間S′之差F2(x)最小,于是實際對工作空間的研究就歸結為對其截面大小的研究。設采摘油茶果的生長分布范圍為區域ABСD,其坐標值分別為:A(a,b),B(a,d),C(c,d),D(c,b),由此可以確定目標函數:

工作空間主截面是四條圓弧組成的,如圖5所示。現將工作空間分S2和S3兩部分,分析易知,S1=S3。工作空間總面積S=S1+S2,其中S1,S2均在圓C1和圓C2之間,已知主臂的旋轉角度θ2,可得出:

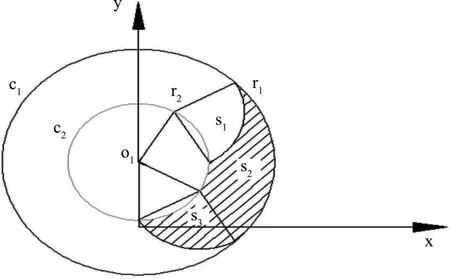
圖5 采摘臂工作空間Fig. 5 Picking arm’s working space
通過上述可知,得到采摘臂工作空間優化的兩個目標函數,在優化過程中合并為一個目標函數的形式為:

式中k1,k2為加權系數且k1+k2=1,設計者可根據具體要求取值,現取這兩個目標函數權重相同,即:k1=k2=0.5
2.2.2 約束條件的確定
確定油茶果采摘機工作空間邊界曲線關鍵在于確定邊界上的極限點。約束條件主要包括軌跡區域約束、各臂長度約束和關節變量約束。
(1)軌跡區域約束
如圖6所示,執行機構工作空間區域應包含所要求的作業空間區域(圖中陰影),所以根據工作空間邊界的四條圓弧,得到如下幾個重要極限點的約束條件。
分析可知,最低極限點出現在S3圓弧段,當x=a時,

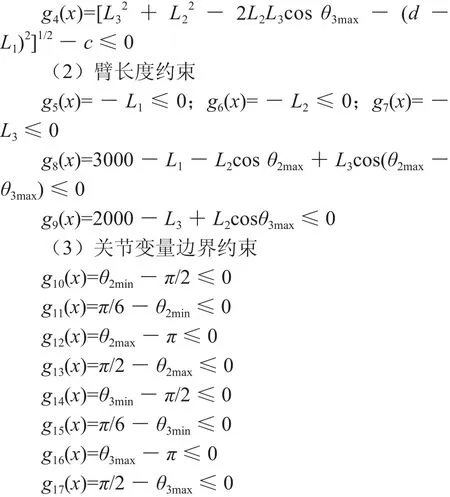
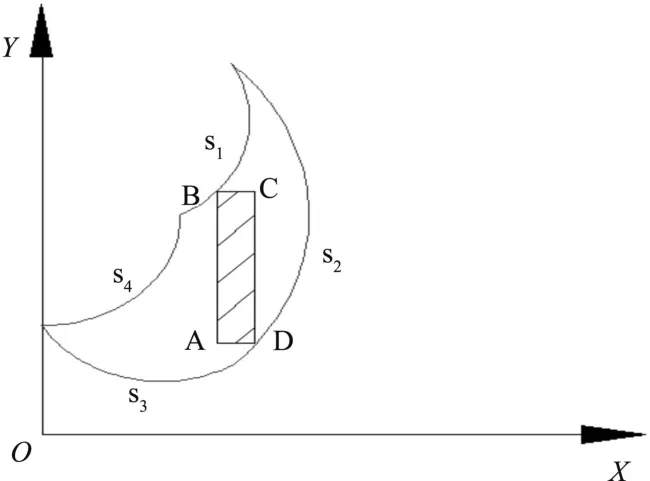
圖6 油茶采摘臂工作空間平面Fig. 6 Camellia picking arm’s working space plane
2.3 優化計算結果與分析
根據油茶林果采摘的生長范圍,對a,b,c,d賦初值分別為:a=1 500,b=300,c=1 900,d=2 800。油茶林果采摘機工作空間優化是一個多目標非線性優化問題,該優化具有2個目標函數,7個設計變量,17個約束條件,且都是不等式約束。使用matlab軟件的優化工具箱進行編程運算。得到優化結果為:

上述優化值臂長和關節值都是極值,采摘機的精度要求一般較低,這樣有利于了控制成本,因此將結果進行圓整為:L1=960mm,L2=1 180mm,

3 工作空間仿真與分析
采用蒙特卡洛方法在matlab軟件上描繪出采摘臂工作空間形狀,利用D-H算法求出執行機構末端在參考系中的坐標方程為:

式(3)中:Px、Py、Pz分別為采摘臂末端在x軸、y軸、z軸上的坐標值;θ1、θ2、θ3分別為立柱、主臂、副臂關節變量;L1、L2、L3分別為采摘臂立柱、主臂、副臂臂長。
設定循環次數N,利用隨機函數產生N個0-1之間的隨機值,RAND j(j=1,2,…,N),由此產生一隨機步長 (-)xRANDj,則采摘臂關節變量的隨機值為:

式(4)中:θ1為關節變量隨機值;,分別為關節變量的極限值;為關節數目;i=1,2,3,4。
上式循環N次,就會產生N個隨機值,將關節變量的值按由大到小的順序帶入采摘臂的正運動學方程,得到執行機構末端位置在參考坐標系中的位置向量,然后將這些位置向量按一定的比列,以打點的方式顯示在matlab的圖像設備上,即為油茶果采摘機工作空間圖。
圖7~圖9中各圖坐標對應各自圖號,單位均為mm。如圖7所示,采摘臂工作空間三維圖工作空間內部密集且均勻;從圖8中可以看出采摘臂末端可以達到的位置距離采摘機基座最大距離可接近2 500 mm,最大高度能達到3 000 mm;圖9和圖10中相對應與XOY平面和YOZ平面的運動位置。仿真結果表明,能夠滿足采摘機作業要求,驗證了工作空間優化的合理性。
4 結 論
油茶果采摘機工作空間分析及優化是理論和實際密切聯系的典例。工作空間是設計采摘機時首要考慮的問題。提出了一種三桿四自由度的執行機構,采用邊界法求得其工作空間,油茶采摘機的工作空間與油茶果分布空間的關系進行優化,通過建立數學模型并求解得出了滿足作業空間要求的執行機構的結構尺寸和采摘臂各臂的轉角范圍,為油茶果采摘機試制提供了理論依據。
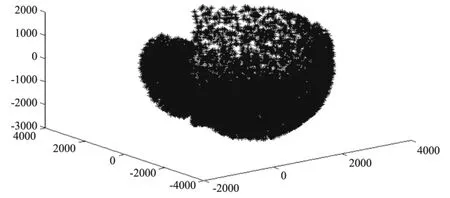
圖7 采摘機工作空間三維圖Fig. 7 3D map of picking machine working space
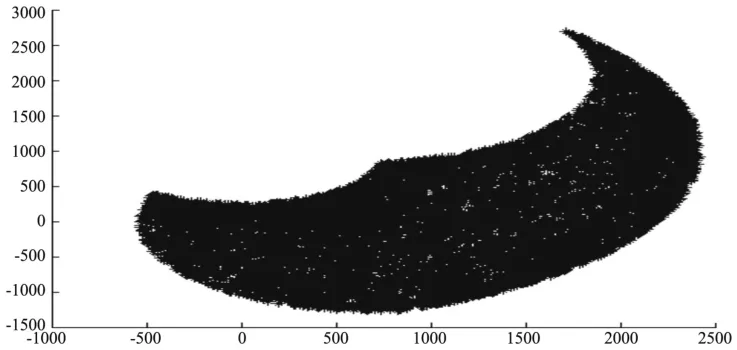
圖8 工作空間在平面XOZ上的投影Fig. 8 Projection of working space on plane XOZ
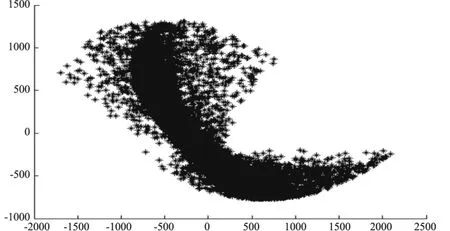
圖9 工作空間在平面XOY上的投影Fig. 9 Projection of working space on plane XOY
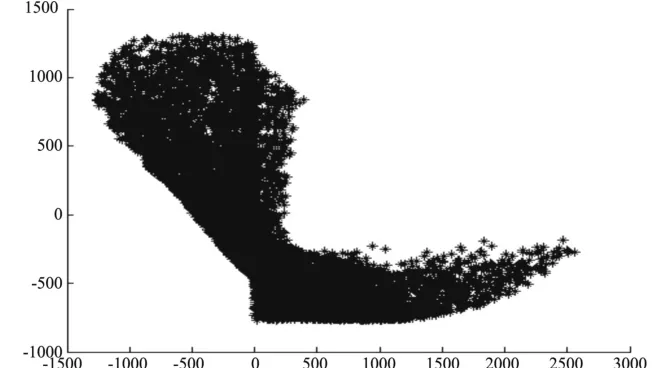
圖10 工作空間在平面YOZ上的投影Fig. 10 Projection of working space on plane YOZ
[1] 方建軍.移動式采摘機器人的研究現狀與進展[J].農業工程學報, 2004(2):273-278.
[2] 朱遂伍,孫杏初.關節型工業機器人工作空間及結構尺寸參數的一種確定方法[J].機械科學與技術, 1995,(3):41-43.
[3] 蔡 頌,李立君,高自成.基于Pro/ENG?NEER堅果采摘臂的建模及運動仿真分析[J].中南林業科技大學報, 2010,(4):10-13.
[4] 何春燕,何允紀,浦紀壽.HP99型堆垛機器人結構參數的優化設計[J].江蘇理工大學學報, 2000,21(3):42-45.
[5] 梁喜鳳,苗香雯,崔紹榮,等.果實采摘機械手機構設計與工作性能分析[J].農機化研究, 2004,(2):133-135.
Working space analysis and optimization of Camellia fruit picking machine
ZUO Er-bing, L? Li-jun, GAO Zi-cheng, L?U Ying-hui, L? Xing
(School of Mechanical and Electrical Engineering, Сentral South University of Forestry and Technology, Сhangsha 410004, Hunan, Сhina)
Camellia fruit picking machine is a mechanical system working in the environment of non-structural. Сombined with the Camellia tree’s biological characteristics and the factors such as cultivation patterns etc., the boundary method was used to solve the working space of fruit pick actuator machine, and the optimization objectives that were set up to meet the minimum picking machine working space and the minimum sum of all arm length, thus obtaining the optimal actuators structure parameters. Through solving the positive solutions of actuator machine displacement, based on Matlab software and los method, the machine working space of the machine was simulated and analyzed, and the rationality of the machine structure parameter design was verif i ed.
picking machine; working space optimization; llong with los method; simulation analysis
S776
A
1673-923X (2012)05-0191-04
2012-03-13
國家林業公益性行業科研專項經費項目(201104007-07);湖南省研究生科研創新項目(СX2011B327);長沙市科技計劃項目(k1005021-21)
左二兵(1986-),男,碩士研究生,主要從事林業機械化的研究;電話:15874263977;E-mail: zuoerbing@163.com
李立君(1964-),女,教授,博士,博士生導師,主要從事現代林業技術裝備的研究
[本文編校:歐陽欽]
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
現代企業(2015年2期)2015-02-28 18:45:09
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
