月球著陸器軟著陸動力學建模與分析綜述
2011-12-26 14:29:00梁東平柴洪友
航天器工程 2011年6期
梁東平 柴洪友
(北京空間飛行器總體設計部,北京 100094)
1 引言
我國探月二期工程的一項關鍵技術就是月面軟著陸技術。為了實現月球著陸器在月球表面成功著陸這一核心目標,月面軟著陸技術和軟著陸動力學仿真已成為工程界和學術界的研究熱點,同時也是重點和難點。由于月球表面與地球表面有較大的差異,而且影響著陸性能的因素很多,開展物理試驗費用高、周期長、難度大。因此著陸動力學仿真分析是軟著陸機構研發和評估著陸器著陸性能的主要方法[1]。著陸器軟著陸動力學仿真最關注解決三方面的問題[2]:著陸穩定性問題、吸能問題和載荷緩沖問題。
月球著陸器月面軟著陸動力學建模和分析的目的主要有以下幾個方面[1,3]:(1)研究和確定著陸器著陸沖擊動力學響應及其相關技術參數,為總體評估和論證月球著陸器著陸設計方案的技術可行性提供依據;(2)通過著陸穩定性分析,確定各種著陸工況條件下著陸器著陸穩定性包絡邊界;(3)通過動力學響應分析確定結構的設計載荷,為結構設計提供依據;(4)為儀器設備提供力學環境條件;(5)進行試驗預分析,為典型著陸工況的選取提供依據,指導試驗實施。
本文在對著陸器軟著陸動力學建模和分析方法進行分析與總結的基礎上,提出了著陸器建模與分析方法的指導性建議,并提出了有待于進一步研究的問題。
2 著陸器軟著陸動力學建模
月球著陸器多采用腿式著陸緩沖機構,著陸腿圍繞著陸器中心軸均勻分布。根據單個著陸腿構型的不同,著陸腿可分為“倒三角式”和“懸臂梁式”著陸腿,如圖1所示。緩沖器安裝在著陸腿的主支柱和輔助支柱中[4-5]。
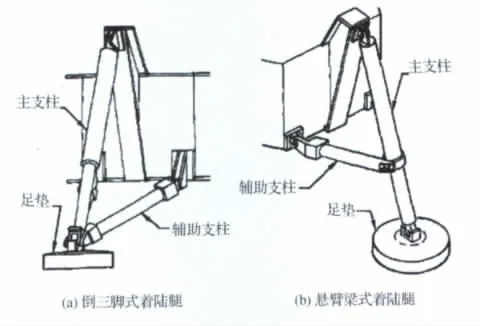
圖1 著陸腿構型形式Fig.1 Configurations of landing gears
由于月球的真空環境,多采用鋁蜂窩芯子作為緩沖器。著陸腿構型及月面的特殊環境,使得軟著陸動力學建模包含了各種非線性因素,主要表現在以下方面:鋁蜂窩緩沖器及月壤的塑性變形屬于材料非線性變形;著陸過程中緩沖器會產生壓縮行程,著陸腿構型不斷變化,這會產生幾何非線性變形;著陸腿構件間以及足墊與月壤間,接觸狀態和接觸條件的無法預知,使得接觸具有很強的非線性特性。這些因素給著陸沖擊動力學建模和仿真分析帶來了很大的困難。
月球著陸器軟著陸動力建模包括三個方面:著陸器模型、月面模型和著陸腿足墊與月壤的接觸模型。
2.1 著陸器模型
2.1.1 簡單的剛體和柔性體模型
上世紀60年代初期,由于計算機速度的限制,缺乏商業化的仿真分析軟件,著陸器軟著陸沖擊動力學模型相對比較簡單,著陸器動力學分析通常采用兩種不同的著陸器模型:剛體模型和柔性體模型。
當著陸器柔性對所研究的著陸性能參數的影響可以忽略時,著陸器可以理想化為一個剛性主體模型和一個著陸緩沖系統模型[6-9]。著陸腿的質量特性通常等效為集中質量進行簡化處理。仿真分析過程中,著陸腿與主體結構連接點在著陸器體坐標系中的坐標是固定的,只需確定足墊與主支柱連接點的體坐標,就可以確定著陸腿的瞬時幾何構型,根據緩沖器的載荷行程特性可以計算出著陸腿作用于主體結構的瞬時作用力。模型中緩沖器相當于被簡化為無質量的非線性彈簧。NASA開展“阿波羅”飛船(Apollo)著陸動力學分析初期,假設足墊與剛性月面接觸且不發生側滑,這樣整個模型實際只有6個自由度。6 自由度剛體模型比較簡單,計算量小,但由于對模型進行了大量的簡化,因此比較粗糙,所提供的設計指標過于保守,這通過試驗數據和飛行實測數據得到了證實。后來的細化模型[8]釋放足墊的3個平移自由度,形成了18 自由度的剛體模型,其計算精度更接近于試驗值。剛體模型只考慮了質心和足墊的自由度,無法計算一些關鍵結構件及連接點的載荷,無法考慮著陸器本體結構柔性與著陸腿柔性的耦合作用,只適用于著陸穩定性分析。
計算著陸器著陸沖擊載荷響應時,則應采用柔性體模型。波音公司的Merchant等人[10-11]以載人飛船中心(MSC,現為約翰遜航天中心)的6自由度剛體模型為基礎,通過剛體模型計算獲得著陸腿與主體結構連接點的載荷時間歷程,然后將載荷時間歷程作為結構動力學分析程序的輸入條件,計算結構的彈性響應。彈性響應方程是帶阻尼的標準模態方程,這些線性方程利用無阻尼正則模態的正交特性,將物理坐標轉換為模態坐標,獲得解耦的彈性響應方程,然后加上黏性模態阻尼。這樣就可以將著陸動力學分析與著陸器本體結構動力學載荷響應分析解耦。O.R.Otto和R.M.Laurenson等人[12-14]通過有限階自由振動模態疊加來表示結構的彈性響應,并將其疊加到大位移剛體運動上,從而獲得結構的總響應,最后通過拉格朗日方程推出著陸器的運動微分方程。
自由模態疊加的方法利用了自由振動模態的正交特性,將物理坐標轉換為模態坐標,物理位移通過有限階振動模態疊加來近似表示,這樣大大減少了系統的自由度。早期的柔性體模型一般只取前幾階主模態進行分析,計算精度比較低,往往只適用于主結構的分析。在方案設計階段,這些模型能提供足夠的精度用以確定初始設計參數。對于次級結構以及儀器設備連接點處的沖擊載荷響應分析則需要更精確的模型。
2.1.2 多體動力學模型
隨著多體動力學理論的發展和計算機運算速度的提高,出現許多商業的多體動力學分析軟件,這些軟件提供了良好的圖形用戶界面和CAD 軟件接口,使著陸器的建模更加方便快捷[15-16]。Masahiro Nohmi等人[17]利用ADAMS軟件建立日本月亮女神-B(SELENE-B)計劃的著陸器剛體動力學模型,仿真模型包括著陸器和分布有巖石和隕石坑的著陸面,緩沖器的載荷行程特性以力函數的形式模擬。為了便于程式化編程和通用性,現有的多體動力學軟件如ADAMS采用的算法多為O(n3)算法,即每個積分時間步內的運算次數與系統自由度的三次方成正比,計算效率低。楊雷[3]基于Newton-Euler方程、鉸鏈相對坐標和鉸鏈約束特性建立了完全遞推形式的系統運動學模型和純微分形式的著陸器多剛體動力學模型,該模型屬于O(n)算法,大大提高了計算的效率,但建模推導過程比較復雜,且沒有考慮結構柔性。
為研究結構柔性對著陸器性能的影響,通常采用部件模態綜合(CMS)的方法,通過有限元分析軟件生成著陸器的模態中性文件,并導入多體動力學軟件中,建立剛柔耦合或柔性體模型[18-19],如圖2所示。分析結果表明,結構柔性對著陸沖擊響應有較大的影響。采用模態綜合方法可以減小計算量,提高計算效率,改善數值求解矩陣的性態。
多體動力學模型的計算效率高,可以在短時間內完成大量工況仿真,但計算精度稍低,特別是無法準確模擬足墊與月壤相互作用力的影響。著陸腿支柱內外筒接觸面之間,由于存在法向力而產生摩擦力,法向力的大小取決于著陸腿幾何構型和所承受的載荷,當分析模型考慮結構柔性時,內外套筒接觸面法向力十分復雜,而多體動力學模型內外套筒之間通常采用滑動副的約束形式,因此很難準確地計算出著陸腿支柱內外筒之間的摩擦力。著陸腿柔性體模型的柔性信息通常是以著陸沖擊前的構型和邊界條件給出的,在著陸沖擊過程中,著陸腿支柱內外套筒會產生壓縮行程,著陸腿構型和邊界條件是不斷變化的,用著陸沖擊前的構型和邊界條件生成的模態中性文件,來分析著陸沖擊過程也會產生一定的模型誤差。
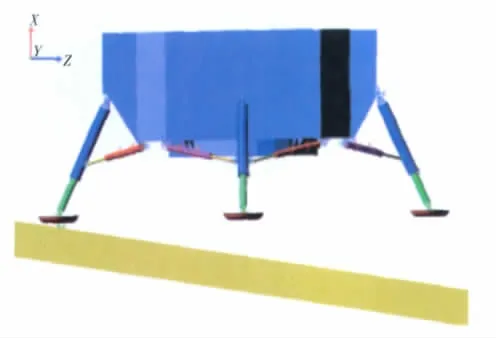
圖2 著陸器ADAMS模型[18]Fig.2 ADAMS model of lander
2.1.3 有限元模型
有限元方法也是著陸器軟著陸動力學分析的有效方法,它可以綜合考慮模型中的材料、幾何、接觸非線性因素。對于著陸沖擊問題通常采用顯式動力學有限元程序求解[20]。常用的顯式非線性動力學軟件有MSC.Dytran、LS-Dyna、ABAQUS/Explicit等。顯式非線性有限元動力學模型的數值解法,是將結構在空間域進行離散,把連續的微分方程轉換成有限階的代數方程組

對求解的時間歷程在時間域內離散,并采用顯式積分方法進行求解。中心差分法是最常用的顯式積分方法,積分步驟如下


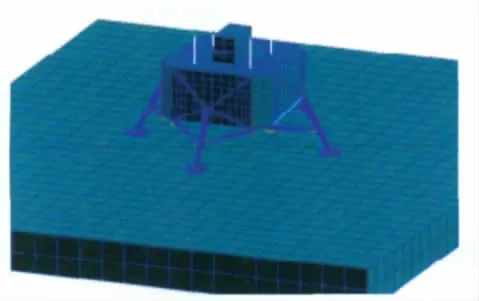
圖3 著陸器有限元模型Fig.3 FEM model of lander
顯式動力學程序求解效率高,但卻是條件穩定的。穩定時間積分步長與模型中最小單元的特征尺寸和波速相關。此外,模型中的接觸和約束條件也對穩定時間積分步長有重要影響。對于著陸器這樣復雜的模型穩定時間積分步長是很小的,因此需要大量的時間積分步。顯式動力學分析程序求解效率高的一個重要因素是采用了對角集中質量矩陣,由于部件模態綜合模型減縮技術會改變質量矩陣的對角特性,商用有限元顯式動力學分析程序通常不支持超單元,因此要減少模型自由度只能對模型進行合理地簡化,減小模型網格密度,在求解精度和計算量之間尋求一個平衡點,以適應工程仿真的要求。著陸器結構很復雜,需要試驗數據的驗證和修正,才能建立出正確的反映著陸器結構動態特性的有限元模型,從而為確定著陸器上的儀器設備的力學環境條件提供依據。
2.2 月面模型
月面模型的建立應考慮兩個方面,即月壤的力學特性和著陸面的地形[23]。從月壤的力學特性出發,月面模型可以分為剛性月面模型和柔性月面模型。
2.2.1 月壤有限元模型
采用有限元模型進行著陸沖擊響應分析時月壤的建模是一個難點,主要涉及材料模型選擇和模型參數的標定。月壤本構模型的相關文獻很少,由于土壤與月壤在宏觀力學特性的相似性,通常選擇已有土壤模型作為月壤的本構模型。常用的土壤模型有摩爾-庫侖(Mohr-Coulomb,M-C)模型、德魯克-普拉格(Drucker-Prager,D-P)模型等。M-C模型假設當發生屈服時,材料體內一個平面上的剪應力和法向應力達到一個臨界狀態。在主應力空間內,M-C模型的屈服面是一個半無限六面棱錐體。D-P模型引入靜水壓力作為M-C模型的光滑近似,在主應力空間內為一個半無限圓錐體。與M-C模型相比,D-P模型在整個屈服面上是連續可微的,因此可以很容易采用數值算法進行分析。為考慮土壤的塑性壓縮,通常會在D-P模型圓錐屈服面底端加一個橢圓帽形面,形成Cap D-P模型。
有限元分析軟件提供了許多用于土壤力學分析的材料模型。蘭利研究中心(LaRC)研究人員[24-26]采用了LS-DYNA軟件中的Mat 5模型用于“獵戶座”成員探索飛行器(CEV)的著陸仿真,Mat 5模型是LS-DYNA軟件中最老的與壓力相關的土壤模型,積累了大量的用戶使用經驗,且需要用戶輸入的本體結構模型參數較少,在CEV 初始設計階段能提供足夠的分析精度。閆軍[27]等采用LS-DYNA軟件中的D-P模型對金屬半球跌落進行模擬,仿真結果與試驗結果很接近,間接證明了該模型用于模擬月壤的合理性。Fasanella E.L 等人[28]采 用MSC.Dytran軟件中的DYMAT 24 材料模型,用于進行金屬半球跌落的試驗仿真,并與試驗值進行對比,證明了該模型能較好地描述土壤類材料的撞擊動力學特性,文獻[21]以此為依據采用DYMAT 24作為月壤的材料模型,并用于著陸器的著陸仿真。楊艷靜[29]將Duncan-Chang非線性彈性模型和D-P屈服準則相結合,形成非線性彈性-理想塑性本體結構模型,并通過ABAQUS軟件的用戶材料子程序UMAT 接口實現該模型,用于月球車和月壤相互作用模擬,但該模型沒有考慮月壤的硬化特性。
商業有限元軟件提供了各種巖土材料模型,但是每種模型均有不足之處,往往缺少基本的材料數據和試驗數據,讓用戶難以選擇和使用。由于在月壤有限元仿真中,必須指定所需的試驗類型和數量,用于恰當地描述材料的響應和標定材料模型參數。雖然美國Apollo計劃和蘇聯的“月球”(Luna)系列探測任務共取回了100多千克的月壤樣本,但仍不足以進行完備的土壤力學試驗。這些樣本通常被用于研究月壤的物理、化學及相關的巖土特性參數,然后根據這些基本信息,選擇合適的地球土壤配制成模擬月壤,以支持月球探測工程中著陸器、月球車的研發。因此,有必要對模擬月壤開展相關的土壤力學試驗,標定月壤本構模型屈服面參數及其硬化特性,用于支持著陸動力學仿真。
2.2.2 月壤離散元模型
離散元方法也可以用于月壤建模,離散元方法的計算域由離散的顆粒單元組成,通過研究離散元系統的集體運動,就可以得到模擬對象的力學狀態分布及演化規律[30-31]。馬煒[32]用離散元方法對半球沖擊試驗進行了建模與仿真,從仿真結果可以看出用離散元方法可以較好地模擬土壤介質的接觸沖擊過程。離散元方法能很好的模擬散體材料的流動、飛濺和在沖擊載荷作用下的動力學響應特性。但離散元仿真的顆粒數與計算時間受到計算機速度的限制,一般的散體材料顆粒數少則幾萬,多則上億,因此每次仿真的時間甚至有可能超過一次物理試驗的時間。離散元與大型有限元分析程序的結合還未能實現,在工程上尚不具備大規模應用的條件。2.2.3月面地形模型
著陸器在月球上著陸需要考慮的地形(terrain)參數主要包括:著陸坡度、撞擊坑(crater)大小和分布、石塊的大小和分布。由于著陸器著陸的地點是以一個著陸區域的形式給出的,著陸器可能在該區域內任意位置著陸,因此地形模型往往是以平均值或概率分布的形式給出的。在NASA航天器設計標準中[23],給出了著陸面坡度平均值和累積頻率分布,撞擊坑和石塊大小和分布概率,由于該標準定制時間較早,很多數據都是通過低分辨率的照片和推測獲得,模型精度較低。地形模型幾何特征還可以通過數字高程圖(DEM)描述。地形模型信息可以用于著陸統計分析,確定著陸器成功著陸的概率。
世界進入讀圖時代后,影像與圖片自然而然地成為了重要且便捷的信息傳遞載體,將越來越多地發揮文化交流與文明融合的功能,為世界各地人們的對接、交流、互動發揮巨大作用。
2.3 著陸器足墊與月壤接觸模型
在著陸器著陸動力學仿真中,如何描述著陸器足墊與月壤之間的接觸撞擊作用是一個關鍵因素。足墊與月壤相互作用模型是著陸器著陸沖擊響應的重要輸入條件,關系到著陸沖擊仿真結果的正確性和精度。目前描述著陸器足墊與月壤之間接觸撞擊模型作用主要有半經驗公式法、有限元接觸算法和離散元方法等。
2.3.1 半經驗公式接觸模型
半經驗公式法是采用集中力來刻畫月壤與足墊間的相互作用。足墊與著陸表面接觸區域的法線方向的作用力表達式通常包括靜承載強度項和動力相關項。靜承載強度通常隨貫穿深度的增加而增大,動力相關項通常與接觸面材料的容積密度和貫穿速度有關。當著陸器沿著陸面切線方向的速度較大時需要考慮切線方向的接觸力。切線方向的作用力通常包括摩擦力和犁鏵力(plowing)[33-34]。
在NASA噴氣推進實驗室(JPL)[34-35]建立的勘測者號(Surveyor)著陸動力學仿真模型與載人飛船中心(MSC)[8]建立的Apollo著陸動力學仿真模型中,其足墊與月壤接觸模型都未考慮月壤的力學特性參數,其待定參數需要通過試驗獲得,且與足墊的幾何參數和特定著陸工況相關。這些模型的特點是用一系列集中參數(lumped-parameter)來描述月壤的靜承載強度和動力學響應特性,因此也可稱為集中參數模型[3]。奔迪克斯公司(Bendix Co.)[36-37]為NASA開發了半經驗公式模型,其中考慮了月壤的力學特性參數。對接觸作用力影響較大的參數包括:容積密度、相對密度、內摩擦角和在特定圍限壓力下的有效彈性模量。該模型接觸力表達式比較復雜,計算量比較大。NASA設計標準推薦,在缺乏對著陸面材料力學特性相關知識的條件下,優先使用表達式比較簡單的集中參數模型[33]。
半經驗公式模型描述簡單,計算速度快并且可以方便地與著陸器多體動力學模型相結合[17-19],在著陸器軟著陸動力學仿真分析中得到了比較普遍的應用。但半經驗公式也存在以下幾方面的不足:模型中的參數與足墊幾何參數以及分析的工況相關,需要通過物理試驗獲得,且當足墊幾何參數或工況變化時需要試驗獲得新的參數;因此其通用性較差,在實際分析中存在很多不便。
2.3.2 有限元接觸模型
非線性有限元動力學分析軟件通常都提供各種復雜的接觸算法,并引入了各種土壤材料模型,只要合理地定義接觸面和接觸參數就可以對著陸器著陸過程中足墊與月壤的相互作用進行模擬仿真,但計算結果的可靠性和正確性很大程度上還取決于月壤的本構關系模型和力學特性參數這兩個關鍵要素[20-21,38]。有限元方法采用了連續介質概念,它在描述局部非均勻、非連續演化和散體介質時存在相當的困難。
軟著陸動力學建模方法及其之間的關系如圖4所示。足墊與月壤的接觸模型和月壤模型的選擇是根據著陸器的建模方法確定的。多體模型和有限元模型復雜、計算精度高,但還不能完全取代簡單的剛體和柔性體模型;簡單的剛體和柔性體模型可以提供工程使用的簡單分析方法,適用于方案設計階段的初步分析,此時著陸器結構的詳細技術狀態還不明確,無法建立復雜的分析模型;簡單分析模型概念清楚、物理意義明確,可用于驗證多體或有限元模型的正確性;隨著設計的進一步深入,則需要采用更精確的多體或有限元模型進行分析,指導結構設計。

圖4 軟著陸動力學建模方法及其聯系Fig.4 Soft landing dynamic modeling methods and relation
3 著陸沖擊動力學分析方法
建立起著陸器軟著陸動力學模型后,就可以對著陸器軟著陸性能進行分析,采用的分析方法有絕對性能法(Absolute-performance Method)和統計法[33]。
采用絕對性能法對某一著陸性能進行分析時,應對輸入參數進行系統組合,確定對所研究著陸性能參數最惡劣的工況條件。對于沒有確定值的輸入參數,則使用該參數的正態分布3σ臨界值。通常情況下,最惡劣工況條件并不是輸入參數的最大值或最小值的組合。文獻[6-9]就是采用確定型分析方法用于Surveyor探測器和Apollo登月艙的設計,要求在指定范圍內的任何著陸條件下都不會發生著陸失敗。確定型著陸分析方法的優點有:當在給定的著陸初始條件范圍內的最惡劣工況確定后,在設計與試驗過程中不會發生大的變化;可以確定一些極限工況條件用于指導試驗實施;可以快速評估著陸器設計參數的變動對著陸性能的影響。確定型分析方法的缺點是:將全部輸入變量的臨界條件組合后,可能會導致過裕量設計。
統計法的原理是:給關鍵的輸入參數定義一個概率密度函數,這些輸入參數包括著陸器的設計參數和著陸時的初始和邊界條件等,然后采用蒙特卡洛法生成輸入參數的樣本集合。蒙特卡洛法著陸仿真分析的輸出參數通常是用來描述著陸性能的參數,如著陸面與主體結構的間隙、關鍵質量點的最大加速度,著陸腿支柱載荷、著陸腿支桿行程、穩定性等,這些性能參數通常也稱為設計參數[33]。這種方法在Surveyor,Apollo,海盜號(Viking)等行星探測器的設計中已經得到應用[10-11,39-42]。輸入參數概率密度函數的精度對統計型分析方法的計算結果具有至關重要的作用。如果無法獲得建立概率密度函數的基本信息,則一般假定一個較為保守的概率分布。同時還要評估假定的概率密度函數對分析結果的敏感性[33]。
統計型著陸分析方法的優點有:減小著陸緩沖系統的過裕量設計程度;可以確定成功著陸的概率,并與其它子系統成功的概率比較和結合,從而確定任務成功的概率。統計型分析的最大缺點是:在著陸器詳細設計和相關參數確定前,無法確定每個著陸仿真輸入參數的精確概率密度函數。此外,要使計算的成功著陸概率在可接受的置信極限范圍內,需要大量的著陸仿真次數,這將會需要大量的計算時間。同時,如果要評估設計參數或著陸條件對變化著陸性能的影響,則要重復以上過程,從而消耗大量的時間。
4 結束語
在方案設計階段,由于設計和技術狀態的未知性,應采用簡單的剛體、柔性體模型或多體動力學模型進行著陸仿真分析,確定方案的可行性,并對不同的方案進行比較,選擇最優的設計方案。在詳細設計階段,結構幾何參數和材料屬性已經基本確定,應采用更精確的有限元模型開展著陸沖擊仿真,確定關鍵結構件沖擊載荷和關鍵設備連接點動態響應,確定儀器設備的力學環境條件。當設計參數未確定或采用計算量大的有限元模型時應采用絕對性能分析方法,而在設計參數基本確定并可獲得關鍵輸入變量概率密度函數時,需要采用簡單高效的分析模型,開展蒙特卡洛統計仿真分析,評估并減小著陸系統的過裕量設計,確定著陸任務成功的概率。
在對建模與分析方法進行分析研究的基礎上,得出以下有待進一步研究和發展的幾個方面:
(1)著陸器主體結構的著陸沖擊動態響應比較復雜,需要建立細化的有限元模型和開展試驗測量,明確其響應特性,修正仿真模型,從而明確設備的響應方式,為確定著陸器主體結構上設備的力學環境條件提供依據。
(2)對模擬月壤開展完備的土壤力學試驗,選擇合理的月壤本構模型,利用試驗數據標定月壤本構模型的屈服面及其硬化特性參數,并建立月壤力學特性參數數據庫,用于支持月壤的有限元建模。
(3)著陸腿套筒彈性變形對套筒軸承摩擦力的影響需要采用更細化的有限元模型進一步研究。
(4)采用蒙特卡洛分析方法時,需要更高效的建模和求解方法,需要進行參數化和自動化建模以適應大規模工況的統計仿真分析。
(5)開發著陸動力學計算機仿真平臺,或者在商業分析軟件平臺上對著陸器模塊進行二次開發,支持今后星際探測器的研發與著陸仿真分析。
(References)
[1]Rogers W F.Apollo experience report-Lunar module landing gear subsystem,NASATN D-6850[R].Washington:NASA,1972
[2]Doiron H H,Zupp G A.Apollo lunar module landing dynamics[C]//Atlanta:The 41stStructures,Structural Dynamics,and Materials Conference and Exhibit.AIAA/ASME/ASCE/AHS/ASC,2000
[3]楊雷.月球探測器著陸過程動力學建模與仿真技術[D].北京:中國空間技術研究院,2009
Yang Lei.The modeling and numerical simulation for the touchdown dynamics of lunar explorer[D].Beijing:China Academy of Space Technology,2009 (in Chinese)
[4]Vergnolle J F.Soft landing impact attenuation technologies review[C]// Washington:The 13thAerodynamic Decelerator Systems Technology Conference.AIAA,1995
[5]楊建中,曾福明,滿劍鋒,等.月球著陸器軟著陸機構研制的關鍵問題及其解決思路[C]//北京:中國科學技術協會,2006
Yang Jianzhong,Zeng Fuming,Man Jianfeng,et al.Key problems and solving approaches in the development of soft landing mechanism of lunar lander[C]//Beijing:China Association of Science and Technology,2006(in Chinese)
[6]Alderson R G,Wells D A.Final report on surveyor lunar touchdown stability study,NASA-CR-80514[R].Washington:NASA,1966
[7]Bendix.Documentation of digital computer programs for lunar landing dynamics system investigation,NASA-CR-130602[R].Washington:NASA,1964
[8]Doiron H H,Zupp G A.Amathematical procedure for predicting the touchdown dynamics of a soft-landing vehicle,NASATN D-7045[R].Washington:NASA,1971
[9]Hildermar R A,Mueller W H,Morton M.Landing dynamics of the lunar excursion module[J].Journal of Spacecraft and Rockets,1966,3(10):1484-1489
[10]LM-10lunar landing loads analysis,NASACR-135919[R].Washington:NASA,1970
[11]Merchant D H,Sawdy D T.Monte carlo dynamic analysis for lunar module landing loads[J].Journal of Spacecraft,1971,8(1):48-55
[12]Otto O R,Laurenson R M,Melliere R A,et al.Analyses and limited evaluation of payload and legged landing system structures for the survivable soft landing of instrument payloads,NASACR-111919[R].Washington:NASA,1971
[13]Laurenson R M,Melliere R A,John R.M.Analysis of legged landers for the survivable soft landing of instrument payloads[J].Journal of Spacecraft,1973,10(3):208-214
[14]Laurenson R M.Analytical determination of the effect of structural elasticity on landing stability of a version of the viking lander,NASACR-112115[R].Washington:NASA,1973
[15]張志娟,楊雷.月球探測器軟著陸過程仿真研究[C]//北京:MSC.Software 虛擬產品開發中國用戶大會,2007
Zhang Zhijuan,Yang Lei.Simulation research of softlanding process of lunar lander[C]//Beijing:China User Conference of MSC.Software Virtual Product Develoment,2007(in Chinese)
[16]王少純,鄧宗全,楊滌,等.月球著陸器新結構的ADAMS仿真研究[J].哈爾濱工業大學學報,2007,39(9):1392-1394
Wang Shaochun,Deng Zongquan Yang Di,et al.Simulation research on novel structure of lunar lander based on ADAMS[J].Journal of Harbin Institute of Technology,2007,39(9):1392-1394(in Chinese)
[17]Masahiro N,Akira M.Modeling for lunar lander by mechanical dynamics software[C]//San Francisco:Modeling and Simulation Technologies Conference and Exhibit.AIAA,2005
[18]曾福明,楊建中,朱汪,等.月球著陸器著陸緩沖性能研究[J].航天器工程,2010,19(5):43-49
Zeng Fuming,Yang Jianzhong,Zhu wang,et al.Research on landing impact attenuation performance of lunar lander[J].Spacecraft Engineering,2010,19(5):43-49(in Chinese)
[19]逯運通,宋順廣,王春潔,等.基于剛柔耦合模型的月球著陸器動力學分析[J].北京航空航天大學學報,2010,36(11):1348-1352
Lu Yuntong,Song Shunguang,Wang Chunjie,et al.Dynamic analysis for lunar lander based on rigid-flexible coupled model[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(11):1348-1352(in Chinese)
[20]Fasanella E L,Jackson K E.Best practices for crash modeling and simulation, NASATM-2002-211944[R].Washington:NASA,2002
[21]萬峻麟,聶宏,陳金寶,等.月球著陸器有效載荷著陸沖擊響應分析[J].宇航學報,2010,31(11):2456-2464
Wan Junlin,Nei Hong,Chen Jinbao,et al.Impact response analysis of payloads of lunar lander for lunar landing[J].Journal of Astronautics,2010,31(11):2456-2464(in Chinese)
[22]Junlin Wan,Hong Nie,Jinbao Chen,et al.Modeling and simulation of lunar lander soft-landing using transient dynamics approach[C]//Chengdu:International Conference on Computational and Information Sciences,2010
[23]NASALangley.Lunar surface models NASAspace vehicle design criteria environment,NASASP-8023[R].Washington:NASA,1969
[24]Fasanella E L,Lyle K H,Jackson K E.Developing soil models for dynamic impact simulations,LF99-7733[R].Washington:NASA,2009
[25]Heymsfield E,Fasanella E L.Using numerical modeling to simulate space capsule ground landings,20090007688[R].Washington:NASA,2009
[26]Fasanella E L,Jackson K E,Kellas S.Soft soil impact testing and simulation of aerospace structures,20080022954[R].Hampton:NASALRC,2008
[27]閆軍,楊雷,張志娟,等.月壤力學材料模型驗證研究[C]//安慶:全國結構動力學學術研討會,2009
Yan Jun,Yang Lei,Zhang Zhijuan,et al.Research on verification of lunar soil material model[C]//Anqing:National Academic Symposium of Structure Dynamics,2009(in Chinese)
[28]Fasanella E L,Jones Y,Knight N F,et al.Earth impact studies for Mars sample return[J].Journal of Spacecraft and Rockets,2002,39(2):237-243
[29]楊艷靜.模擬月壤和月球車車輪相互作用的數值仿真和試驗研究[D].北京:中國空間技術研究院,2010
Yang Yanjing.Numerical and experimental research of interaction between lunar soil and lunar rover wheel[D].Beijing:China Academy of Space Technology,2010(in Chinese)
[30]Renzo A,Maio F P.Comparison of contact-force models for the simulation of collisions in DEM-based Granular[J].Chemical Engineering Science,2004,59(3)
[31]Ha H B,Taizo K,Ryoichi F,et al.Numerical and experimental studies of gravity effect on the mechanism of lunar excavations[J].Journal of Terramechanics,2009,46:115-124
[32]馬煒.散體介質沖擊載荷作用下力學行為理論分析與算法實現[D].北京:北京大學,2008
Ma Wei.Dynamical behavior of granular materials under impact[D].Beijing:Peking University,2008 (in Chinese)
[33]Jones R H.Landing impact attenuation for non-surface-planing landers,NASASP-8046[R].Washington:NASA,1970
[34]Sperling F,Garba J.Atreatise on the Surveyor lunar landing dynamics and an evaluation of pertinent telemetry data returned by Surveyor I,NASA-CR-87421[R].Washington:NASA,1967
[35]Sperling F B.Basic and mechanical properties of the lunar soil estimated from Surveyor touchdown data,NASA-CR-109410[R].Washington:NASA,1970
[36]Winters H K,Alderson R G,Woo J Y,et al.Lunar module(LM)soil mechanics study,NASACR 92208[R].Washington:NASA,1968
[37]Black R J,Winters H K.Footpad-soil interactions during spacecraft touchdown[J].Bendix Technical Journal,1968:19-32
[38]Shoop S A.Finite element modeling of tire-terrain in-teraction[D].Michigan:University of Michigan,2001
[39]Chenoweth H B.Monte Carlo simulation of the Apollo command module land landing[J].Journal of Spacecraft,1971,8(10):1074-1078
[40]Lavender R E.Monte Carlo approach to touchdown dynamics for soft lunar landings,NASATN D-3117[R].Washington:NASA,1965
[41]Muraca R J,Campbell J W,King C A.AMonte Carlo analysis of the viking lander dynamics at touchdown,NASA-TN-D-7959[R].Washington:NASA,1975
[42]Queen E M,Striepe S A,Powell R W.An approach to simulation of extreme conditions for a planetary lander,NASATM-2001-211246[R].Washington:NASA,2001
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18