滑坡體滑動姿態自動監測系統的研究
2011-11-07 02:15:32陳文俊周策劉一民
鉆探工程 2011年11期
陳文俊,周策,劉一民
(中國地質科學院探礦工藝研究所,四川成都 610081)
滑坡體滑動姿態自動監測系統的研究
陳文俊,周策,劉一民
(中國地質科學院探礦工藝研究所,四川成都 610081)
通過研究滑坡體在突發性災害爆發前后姿態的變化過程和規律,以及自動監測和無線傳輸技術,開發為地質災害預測預報所需用的滑坡體滑動姿態、加速度自動監測儀,采用有數據采集和存儲器功能的“黑匣子”,對滑坡體成災全過程進行跟蹤監測。實現對滑坡體滑動三維位移的方位、速度和加速度變化情況的全程實時監測,解決以往不能對滑坡體三維姿態和滑動加速的全程實時監測的問題,推動地質災害監測技術進步。
滑坡體;滑動姿態;加速度;黑匣子;實時監測;地質災害監測
0 引言
我國是一個地質災害多發的國家,其災害分布廣、突發頻率高、危害大。而在約占國土總面積2/3的山地中,發生地質災害的主要表現形式是山體滑坡。為了減少山體滑坡這類地質災害給社會帶來的危害,進行地質災害監測預報是非常必要的。目前我國地質災害監測預報方法以地表變形監測和深部水平位移監測居多,而地表變形要滯后于深部位移。深部位移監測主要是利用鉆孔測斜儀,而這種方法由于測斜管在地下受壓變形后,測斜儀損壞或者不能下到測點位置,不能測量深部滑體滑移全過程,且不能準確判斷滑體深部真正的滑動方向。目前深部位移監測大多仍是人工定時采集為主,未能實現實時自動監測,這樣數據采集不及時,不齊全,不能實時動態監測滑坡變化狀態,難以全面認識滑坡滑動全過程。
為了能全面認識滑坡滑動全過程,研究通過對滑坡災害發生全過程的監測,獲取滑坡體滑動時的位移、方位、速度、加速度等參數,并在劇滑后驗查分析存儲的信息,高密度、高質量采集數據,準確、迅速地判斷“滑坡活動機理的特征”是非常必要的。進一步完善和發展滑坡變形監測方法,推動滑坡監測預報系統發展對減災防災具有重大意義,是非常適時和緊迫的。
1 國內外研究現狀
據查新報告可知,國內外未見采用有數據采集和存儲器功能的“黑匣子”對滑坡體成災全過程的跟蹤監測,實現對滑坡體滑動三維位移的方向、加速度變化情況的全程實時監測的報告。
本項目在國內外首次實現滑坡體滑動時間、部位、水平距離、滑動方位、速度、加速度等參數在滑坡災害發生全過程的同時監測。在滑坡深部位移變形監測中采用帶存儲器的黑匣子跟蹤存儲信息,可將全程監測數據存于“黑匣子”內,作為劇滑后驗查分析存儲的信息依據,便于進一步研究滑坡滑動強度、規模和防范措施,同時實現數據無線傳輸并在監測中心查看監測參數,為提高地質災害預測預報準確率提供了極佳的技術手段。
2 監測系統的組成及功能
監測系統主要由“孔下黑匣子”(傳感器及數據采集探管)和地表滑坡姿態自動監測儀(包括數據采集、無線傳輸系統、太陽能供電等)以及后宿數據接收處理中心等組成,主要分為2大部分(見圖1):現場工作部分和監測中心部分。
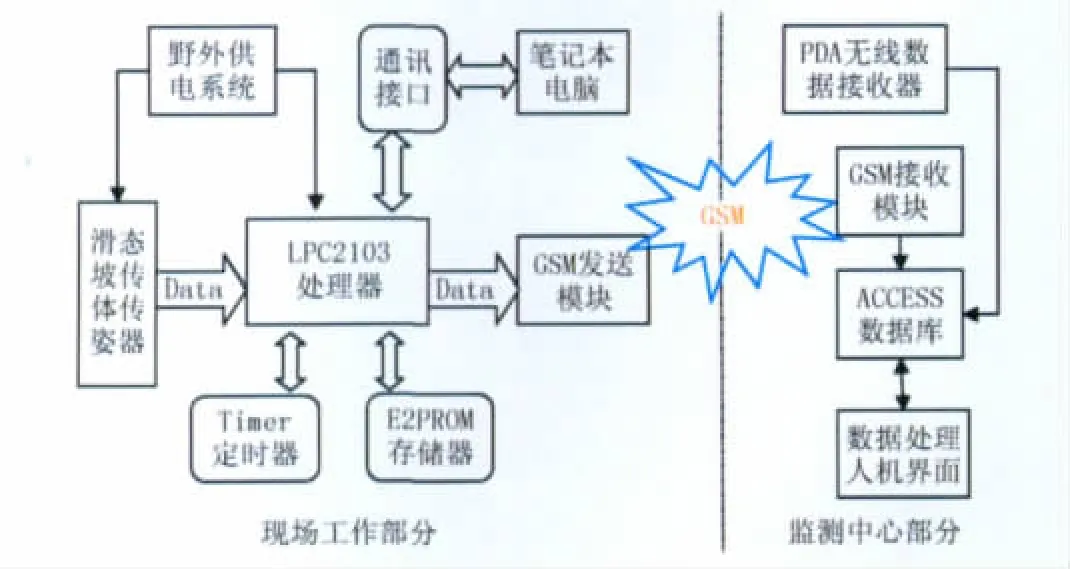
圖1 監測系統的組成
2.1 現場工作部分
現場工作部分主要功能為數據采集(即A/D轉換)、數據預處理(即計算處理為相對應的傳感器量值)、野外供電(即太陽能供電系統)、數據收發(即雙工通訊數據、命令收發)、前置GSM無線通訊模塊底層軟件設置(即傳感器類型、數據采集時間、GSM無線通訊模塊號碼等設置)等,見圖2。
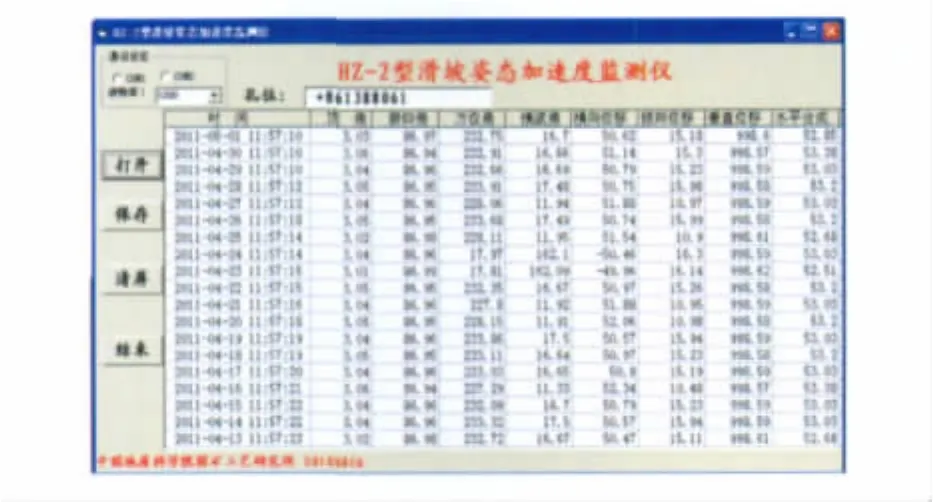
圖2 現場數據實時采集軟件界面
2.2 監測中心部分
監測中心部分主要功能為建立數據庫、數據接收入庫、命令發送、數據分析處理等。其中必須涉及到兩大主要功能(如圖3):通訊設置和數據處理。
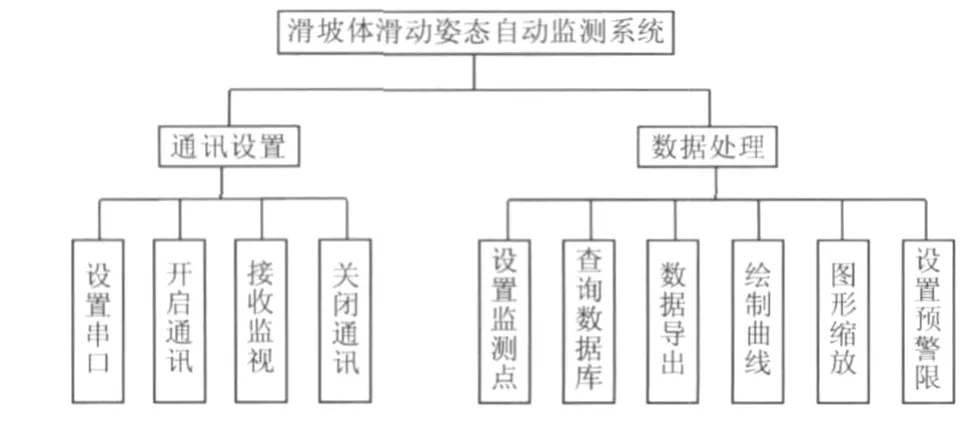
圖3 監測中心軟件系統功能模塊圖
(1)要使通訊模塊和姿態監測儀進行信息通訊,根據硬件條件選擇串口作為通訊端口,所以要對串口通訊作出設置、要啟動通訊或關閉、要區分無線通訊和直連通訊方式。
(2)由于野外一般會有多個監測點,所以需要有監測點的管理功能,同時因為利用GSM通訊中的短信方式,所以有必要篩選信息,過濾垃圾短信。
(3)接收的監測數據存入數據庫后,需要有分類查詢功能,繪制數據曲線,圖形縮放以便作出直觀的判斷和分析。
(4)為了提高數據的利用率,需要有數據導出,打印輸出等功能。
圖4為監測中心數據接收處理軟件界面。
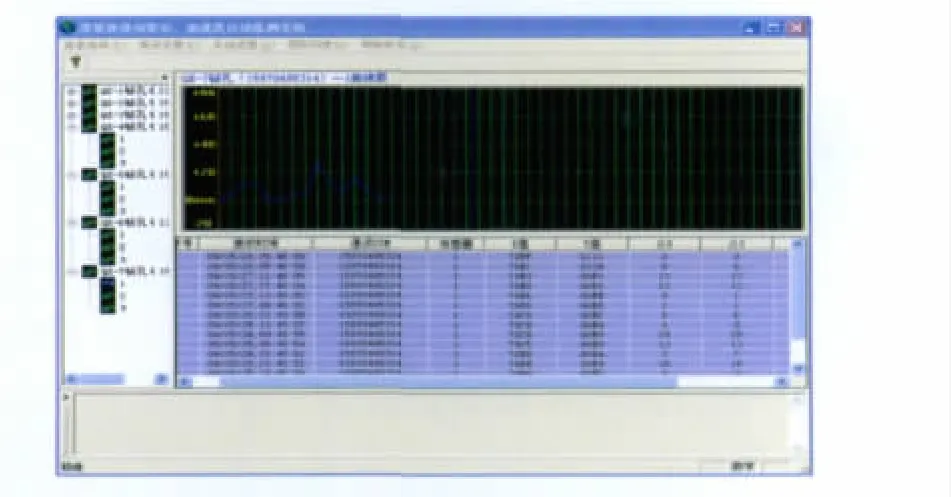
圖4 監測中心數據接收處理軟件界面
3 監測原理
本系統主要是采用三維加速度計和三維磁阻計,測量姿態儀“黑匣子”在滑坡體內的頂角、扭轉角、方位角。
三維角度數據計算處理過程如下。
3.1 坐標系與角度定義(圖5)
3.1.1 坐標系原始位置2個坐標系重合,α=0,θ=0,β=0。ON、OE、OD為地球的三軸,OX、OY、OZ為監測儀探管的三軸。

圖5 坐標系
3.1.2 傾角
OZ與OD之間的夾角θ,即平面OXY與OEN之間的夾角。沿Y軸逆時針旋轉為正,即向下為正。
3.1.3 方位角
OED平面與OYZ平面之間的夾角α,從北向東轉為正。沿Z軸順時針旋轉。
3.1.4扭轉角
OZD平面與OXZ平面之間的夾角β,沿X軸順時針為正。
3.2 采集數據處理
(1)找出Axmin,Axmax;Aymin,Aymax;Azmin,Azmax。
(2)計算ΔAx,ΔAy,ΔAz。
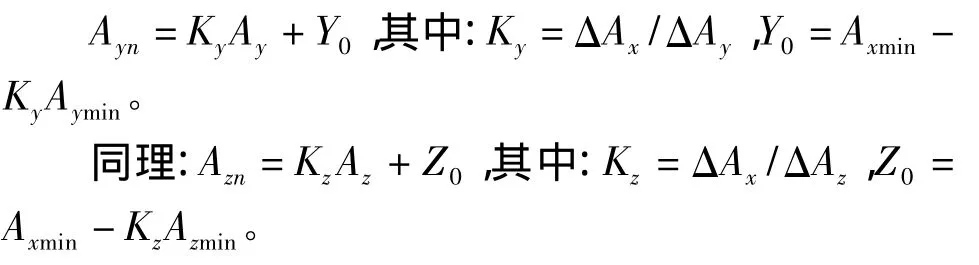
(3)修正Ay與Az:
(4)求中心偏移值。Aoffset=Axmin+ΔAx/2。
(5)測量值中心偏移:

(6)Mx,My,Mz的計算:
①將Mx,My,Mz在水平狀態(AS-Z最大時)下旋轉一周,得到Mx-max,Mx-min;My-max,My-min。在垂直狀態(AS-X最大時)下旋轉一周,得到Mz-max,Mz-min。并由此計算出ΔMx,ΔMy,ΔMz,并找出其中最大的為ΔMmax。
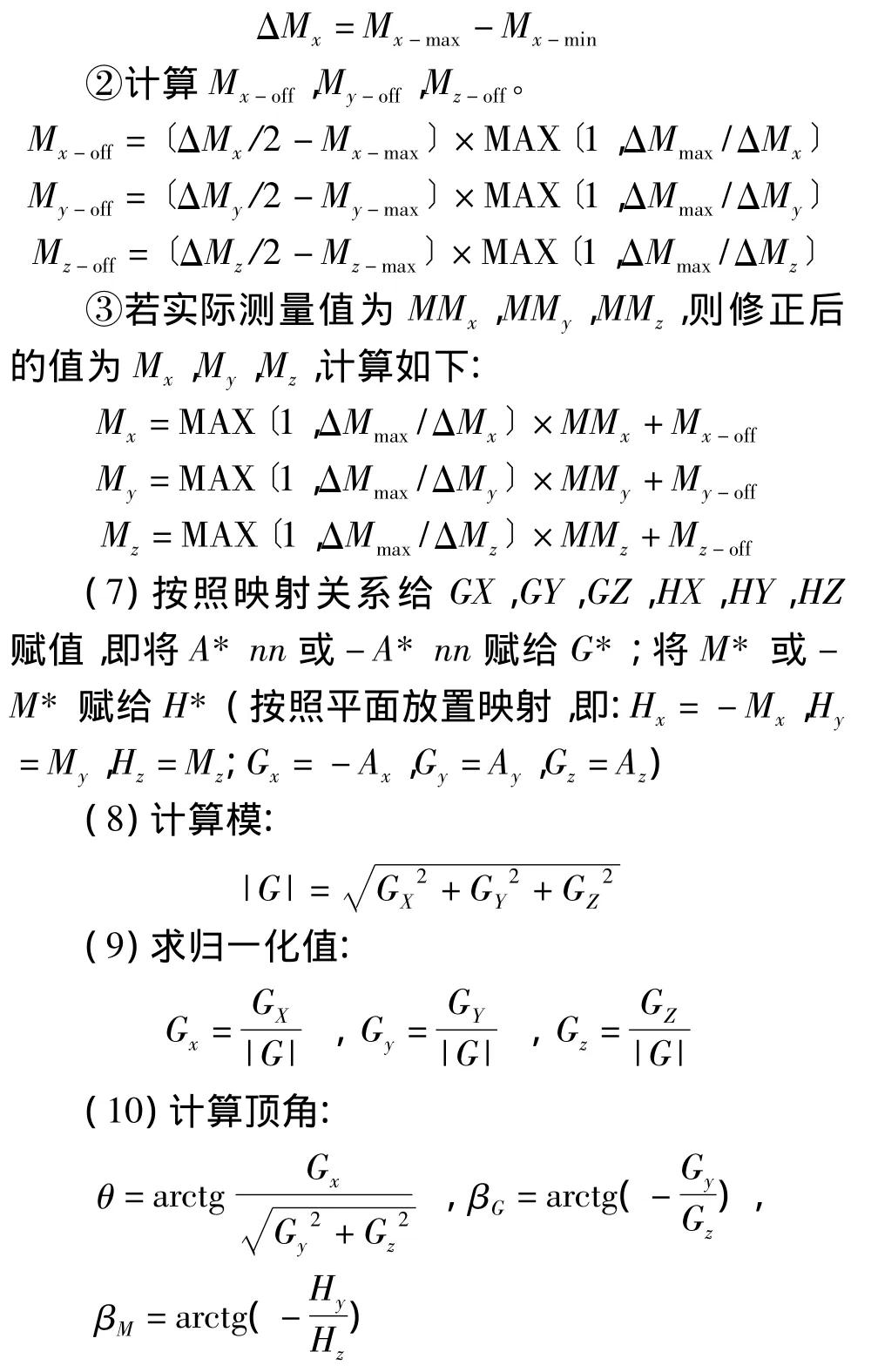
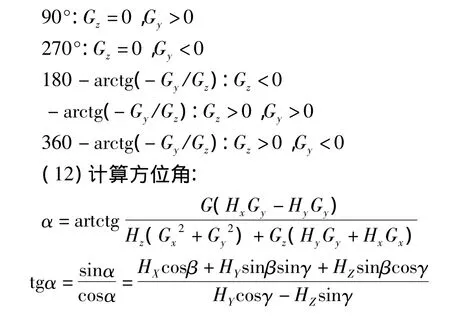
(11)計算扭轉角:
βG根據Gy與Gz情況計算為0~360°,計算如下:
4 主要技術指標
(1)加速度計量程和精度:(1~10)g、(10~100)g、(100~200)g;精度2%of FS 0~±2g;零位穩定性:5×10-4g;分辨率:1×10-5g;零位偏差:±3 ×10-3g。
(2)方位角、測量范圍:0°~360°;精度:±2°。
(3)頂角、俯仰角、橫滾角測量范圍:0°~90°;精度:±0.1°。
(4)三向位移測量范圍:0~1 m以上;精度5%。
(5)地下探管抗液壓強度:3 MPa。
(6)工作溫度:0~40℃。
5 工作方式
本監測儀主要包括2種工作方式:現場人工監測和實時自動化監測。
5.1 現場人工監測
主要通過監測人員親自到現場,用筆記本電腦與姿態監測儀連接,發送不同的采集指令來實現對數據的采集,然后通過RS232接口將數據發送到筆記本電腦上,保存記錄數據。
5.2 實時自動化采集
首先,通過GSM通訊盒設定自動監測的周期,然后設定每天儀器開啟的時間及該監測孔序號和儀器編號。到了設定時間,通訊盒給儀器打開電源,儀器啟動A/D轉換采集程序,通過儀器內RS-232串口把采集的數據發送到通訊盒的存儲器中,然后通過短消息(SMS)發送到中心站,接收進入數據庫進行保存并分析。
6 監測工藝技術手法
(1)本系統帶有數據采集和存儲器功能的“黑匣子”探管,將帶纜線的“黑匣子”監測探管投入傾斜管內,每隔1 m利用纜線的長度記錄下孔深,并將監測探管采集得到的鉆孔方位角、扭轉角、位移量參量,通過纜線傳輸到地面,供監測人員查看分析判斷。
(2)在判斷鉆孔某處位移突變后,將監測探管投入傾斜管內突變點部位,并記下此點孔深作為固定監測點,利用地面二次監測儀表(滑坡姿態自動監測儀)通過GSM通訊定時自動發送到監測站中心或智能手機處理。
7 野外試驗
2010年5月至今,應承擔四川省雅安市雨城區地質災害示范區的要求,在雅安市雨城區多營、孔坪坡面上,采用由本單位研制的HZ-Ⅰ型滑坡體滑動姿態動監測儀監測滑坡的動態。
7.1 測試地區地層情況和測試鉆孔實際剖面情況
測點安排在雅安市雨城區多營、孔坪坡面上。多營坡面選二點安裝兩組探頭,多營1號和多營3號,孔坪坡面選一點安裝一組探頭,孔坪3號。該地區地層巖性為J2p,自上而下為棕紅色泥巖和粉砂巖。采用鉆孔法進行測試,鉆孔實際剖面從地表面起,孔深1600 mm已進入基巖,實鉆深度為2000 mm。
7.2 采用的儀器和探頭埋設情況
采用HZ-1型滑坡體滑動姿態自動監測儀。
探頭埋設情況:雅安市雨城區多營、孔坪坡面上,儀器的測試探頭上布設傳感器探頭一組,埋設在已打好的直經為48 mm,深度為2000 mm鉆孔內。
7.3 測試結果及分析
以雅安市雨城區多營3號監測點舉例(監測曲線見圖6)。
監測方位:西南向192°;橫滾角:0.36°~1.80°間變化;俯仰角:29.96°~31.76°間變化;頂角: 59.44°~60.92°間變化;水平位移(按坡面到基巖1500 mm計算):-10~9.76 mm間變化;沉降位移(按坡面到基巖1500 mm計算):-16.30~16.41 mm間變化。
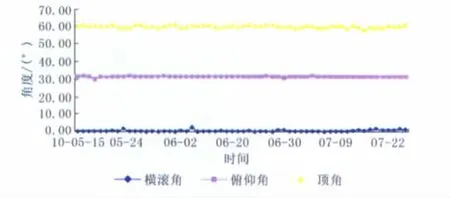
圖6 多營3號監測曲線圖
7.4 監測總結
從監測的情況來看,監測方位、橫滾角、俯仰角、頂角均有變化,水平位移值最大僅10 mm,沉降位移最大僅16.41 mm,應該是一種細微的晃動,未到滑坡的警界線。在為期半年的監測中,HZ-1型滑坡體滑動姿態自動監測儀、野外太陽能供電系統和無線通訊工作正常。
8 結語
通過野外試驗所測數據,證明HZ-1型滑坡體滑動姿態、加速度自動監測儀工作正常,所測的數據可靠,并可連續實時自動遙測采樣和存儲,是一種比較理想的滑坡監測儀器;HZ-1型滑坡體滑動姿態自動監測儀在地質災害防治監測領域內首次采用先進的三維加速度計等傳感器對滑坡體滑動姿態、加速度進行無線自動監測,除了量測滑坡體滑動姿態、加速度外,還能量測解算滑坡體孔內滑動位移量,可以進行巖土層內剖面姿態、加速度測試,是地質災害預警監測理想的選擇。
[1]靳曉光,李曉紅,王蘭生.滑坡鉆孔傾斜量測及數據處理[J].成都理工學院學報,2002,(2).
[2]仝達偉,張平之,吳重慶,等.滑坡監測研究及其最新進展[J].傳感器世界,2005,(6).
[3]王義鋒.基于測斜儀監測成果的蠕滑體變形機制分析[J].巖石力學與工程學報,2009,(1).
[4]徐曉東,趙忠,李麗錦.采用磁阻傳感器與加速度計的電子羅盤設計[J].兵工自動化,2005,(5).
[5]劉越,王涌天,胡曉明.測量運動物體姿態的三自由度定位算法的研究[J].計算機測量與控制,2002,(6).
[6]趙申杰.滑坡實時監測報警系統測量終端研究[D].四川成都:成都理工大學,2004.
[7]章步云.滑坡位移無線監測系統設計與實現[D].江蘇南京:南京理工大學,2004.
Research on Automatic Monitoring System of Landslide Sliding Attitude
CHEN Wen-jun,ZHOU Ce,LIU Yi-min(The Institute of Exploration Technology,CAGS,Chengdu Sichuan 610081,China)
By the study on landslide attitude changing processes and regularity before and after the sudden disaster outbreak,using automatic monitoring and wireless transmission technology,an automatic monitor of landslide attitude and acceleration was developed for geological disasters forecast.The“black box”with data acquisition and storage function was used for tracing monitoring the whole formation process of landslide hazard to realize real-time monitoring of 3d displacement azimuth,velocity and acceleration changes.
landslide;sliding attitude;acceleration;black box;real-time monitoring;geological hazard monitoring
P642.22;TH762
A
1672-7428(2011)11-0076-04
2011-05-28
國土資源部公益性行業科研專項項目“滑坡體滑動姿態加速度自動監測系統的研究”(200811071)
陳文俊(1977-),男(漢族),四川西充人,中國地質科學院探礦工藝研究所工程師、軟件設計師,核工程及測控技術專業,從事地質災害監測技術的研究開發工作,四川省成都市一環路北二段1號,cwj@cgiet.com。