自適應模糊神經網絡控制在鍋爐過熱汽溫控制中的應用
2011-10-29 08:25:54牛培峰張密哲陳貴林王懷寶竇春霞
動力工程學報 2011年2期
牛培峰, 張密哲, 陳貴林, 王懷寶, 張 君, 竇春霞
(1.燕山大學 電氣工程學院,秦皇島066004;2.燕山大學 工業計算機控制工程河北省重點實驗室,秦皇島066004)
火電廠鍋爐過熱汽溫對象具有較大的慣性、時 滯性和非線性,并且其動態特性隨著運行工況的變化而變化,其精確的數學模型難以建立.傳統的PID控制器參數在對象發生變化或者運行工況改變時,控制品質會下降[1].針對常規的模糊推理系統需要根據專家的知識和經驗完成模糊規則和隸屬度函數以及穩態精度不高等缺點,本文提出一種自適應模糊神經網絡控制器,模糊神經網絡是模糊推理和神經網絡的有機結合,它一方面能夠通過神經網絡對樣本數據的學習使模糊推理系統的規則自動生成,另一方面,使得神經網絡的每一層、每個節點都具有了明確的物理意義.此控制器仍然保留著串級控制的優點,副控制器仍采用P控制,主控制器由一個模糊神經網絡控制器與一個智能PI環節并聯組成,以Matlab/Simulink為仿真平臺構建了控制模塊,對鍋爐過熱汽溫被控對象進行仿真,結果表明該控制系統具有較好的控制品質和較強的自適應能力.
1 自適應神經模糊推理系統
自適應神經模糊推理系統(ANFIS)使用神經網絡來實現模糊推理,它能改善傳統模糊控制設計中依靠人的思維來調整隸屬度函數以減小誤差,并以復合式的學習過程為基礎,建立一套If-Then規則,調整出所需要的模糊推理輸入輸出關系,其結構見圖1.
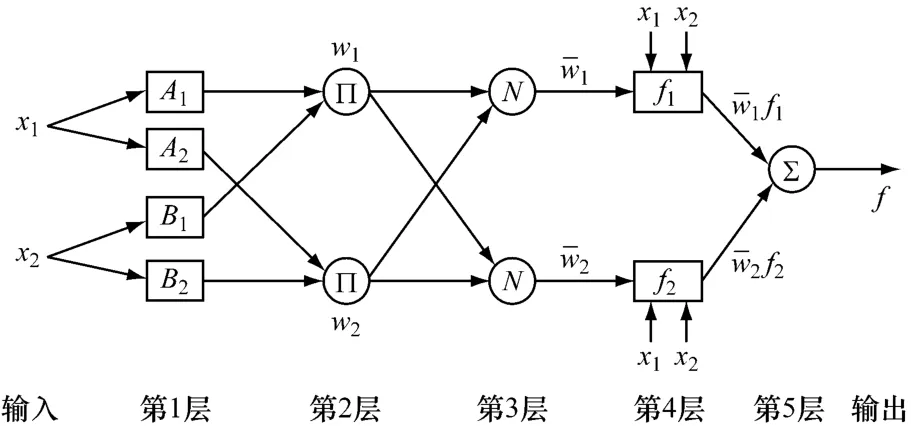
圖1 ANFIS網絡結構圖Fig.1 Structural diagram of the adaptive neural-fuzzy inference system
在圖1中,x1、x2是系統的輸入,f是推理系統的輸出,用O1,i表示第一層第i個節點的輸出[2].
第一層為模糊化層,用于計算輸入的隸屬度,該層每個節點的輸出函數為:

式中:Ai和B j是模糊集;μAi(x1)、μBj(x2)是模糊集對應的隸屬度函數.
第二層用于計算各條規則的適應度wi,并將各個輸入信號的隸屬度函數相乘,乘積作為本規則的適應度.

第三層對各條規則適應度進行歸一化處理.

第四層為每個節點的傳遞函數,為線性函數,表示局部的線性模型,計算每條規則的輸出:

式中:fi為Sugeno型模糊結論輸出函數.
第五層為解模糊層,用于計算所有規則的輸出之和.

給定條件參數后,ANFIS的輸出可表示為結論參數的線性組合.
由于采用梯度下降的方法進行參數學習時容易陷入局部最小,這里采用梯度下降法和最小二乘法的混合學習算法,具體可分為2個步驟.
(1)確定條件參數的初始值,用最小二乘法計算結論參數,由式(7)得

其中列向量X中的元素構成結論參數集合{p1,q1,r1,p2,q2,r2}.若已有p組輸入輸出數據對,且給定條件參數,則矩陣A、X、f的位數為p×6,6×1,p×1.一般樣本數據的個數遠大于位置參數的個數,使用最小二乘法可以得到min‖AX-f‖意義下的結論向量最佳估值X*,即:

(2)根據上一步驟計算得到的結論參數進行誤差計算,采用前向反饋神經網絡中的BP算法,將誤差由輸出端反向傳到輸入端,用梯度下降法更新條件參數,從而改變隸屬度函數的形狀.
仿真前,將預設好規則數和隸屬度函數形狀的ANFIS經過輸入輸出數據的訓練,形成一個適合已有數據模型的模糊推理模塊,其工作原理和過程與典型模糊推理系統相同,經過輸入模糊化、模糊推理、解模糊化和控制輸出等過程.
2 自適應模糊神經控制器設計
圖2為基于自適應模糊神經網絡的控制器,該控制器在保持常規串級控制的基礎上,主控制器由一個基于ANFIS的模糊控制器和一個智能PI模塊來代替,副控制器仍然采用P控制器.
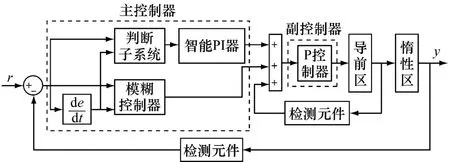
圖2 自適應模糊神經智能控制結構圖Fig.2 Structure of the fuzzy-neural network controller
2.1 自適應模糊神經網絡控制器
自適應模糊神經系統采用的模糊規則為輸入變量的線性組合,即

式中:i=0,1,…,n;j=1,2,…,m;Rj為第j條模糊規則所表示的模糊蘊含關系;Aji為xi的第j個語言變量值,pji的后件網絡的連接權值.
若輸入量采用單點模糊化的方法,對于給定的輸入x,可以求得對于每條規則的適應度為

式中:μAji(xi)是第i個輸入分量隸屬于第j個語言變量模糊集合A的隸屬度函數.
模糊系統的輸出量為每條規則的輸出量的加權平均,即
式中:αj為對于給定的輸入x所求得的對于每條規則的適應度[3].
自適應模糊神經網絡控制器的2個輸入變量分別是過熱器出口溫度的偏差e和偏差變化率ec,e、ec對應的模糊化變量分別是E、EC,E和EC的基本論域選為[-6,+6].按照常規溫度模糊控制的訓練樣本數據查詢表[4],利用神經模糊推理編輯器[5]將訓練樣本數據載入訓練數據集,定義輸入變量的隸屬度函數的數目為7,類型為gaussmf型,輸出變量的隸屬度函數類型為constant型.設訓練初始步長為0.01,目標誤差為0,經過400步訓練后生成初始模糊推理系統,建立圖3所示的2-14-49-49-1五層模糊神經網絡系統,圖4、圖5分別是經過訓練得到的E、EC的隸屬度函數曲線.
2.2 智能比例積分控制器
智能比例積分(PI)控制器由帶有使能端的邏輯判斷子系統和PI環節2個模塊組成,見圖6.邏輯判斷子系統根據e和ec的符號來判斷系統所處的狀態,從而控制PI環節是否有效.定義誤差e=ry,ec為誤差變化率,當e·ec>0或e=0、ec≠0時,PI控制器作用有效,主控制器由模糊神經網絡控制器和PI控制器疊加作用實現,而當e·ec<0或ec=0時,PI控制器作用失效,主控制器采用單獨的模糊神經網絡控制器來實現.在仿真過程中經過調試,最終整定的參數kp=1.2,ki=100.
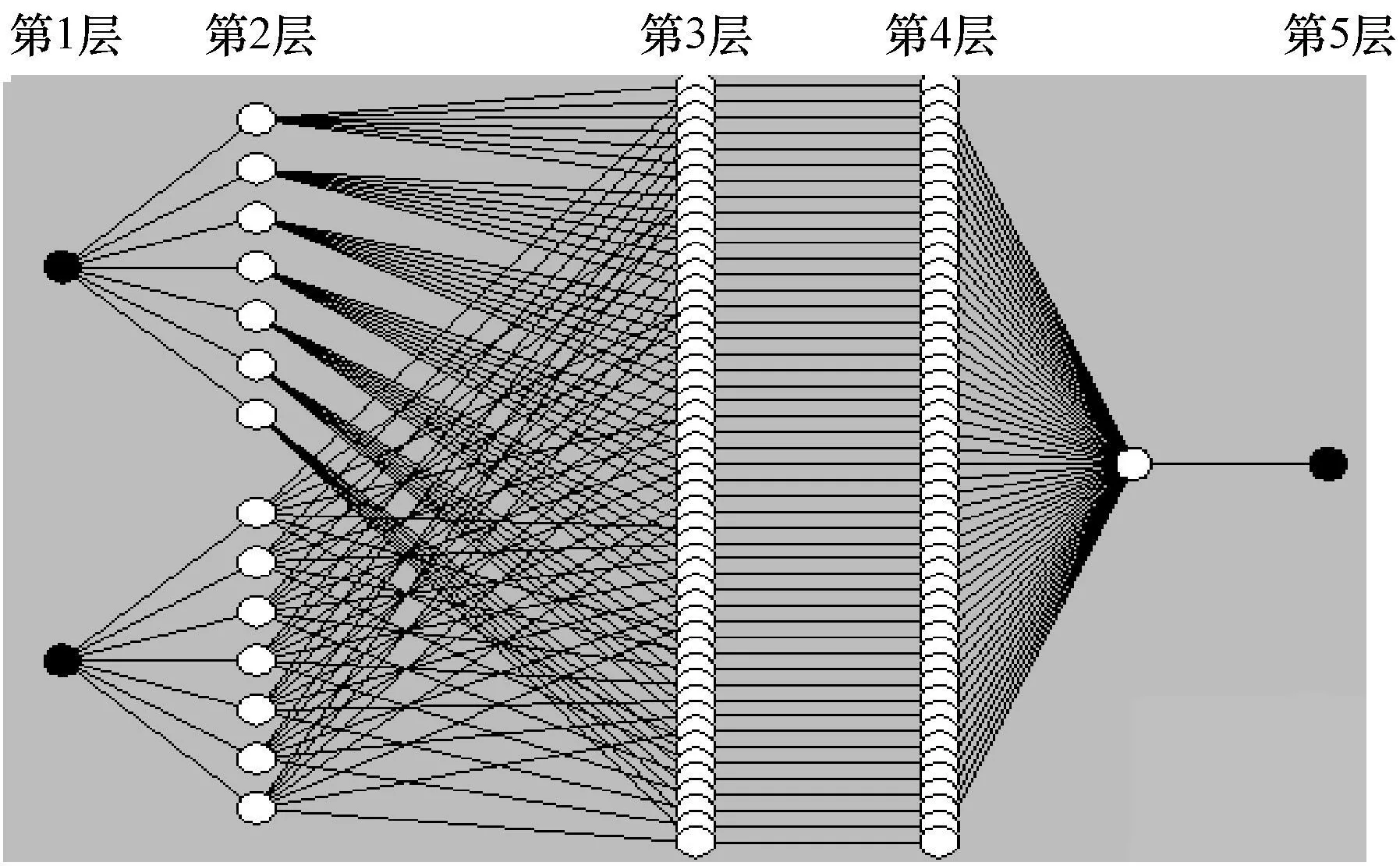
圖3 模糊神經網絡結構Fig.3 Structure of the fuzzy-neural network
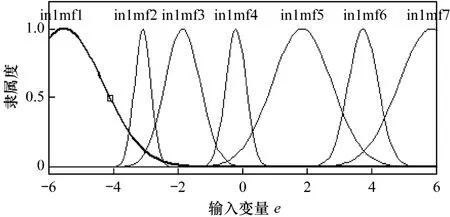
圖4 E的隸屬度函數Fig.4 Membership function of E
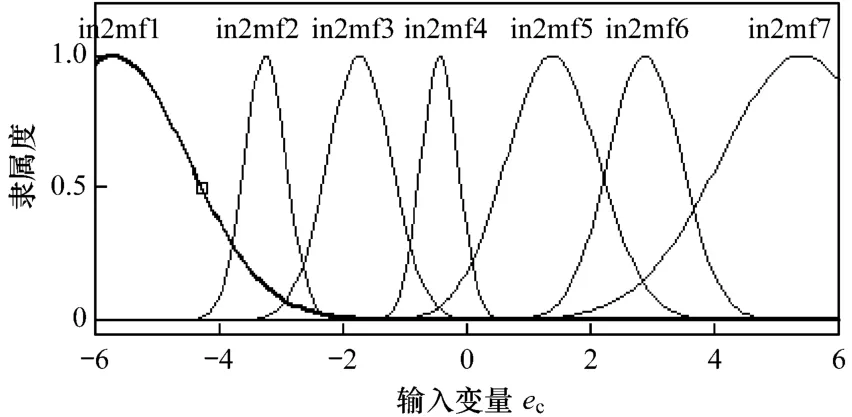
圖5 EC的隸屬度函數Fig.5 Membership function of EC
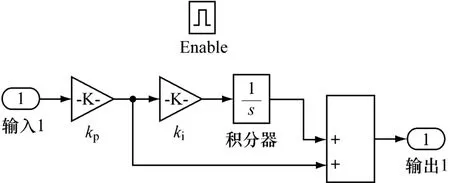
圖6 智能比例積分控制器結構Fig.6 Structure of the intelligent PI controller
3 仿真研究
以某電廠600 MW超臨界直流鍋爐過熱汽溫模型作為被控對象,表1是在不同負荷下的過熱汽溫傳遞函數[6],使用Matlab/Simulink對其動態特性進行了仿真研究,并與常規PID控制進行比較.
在無外界擾動的情況下,分別對常規PID控制器和自適應模糊神經網絡控制器進行了仿真,給定輸入階躍信號為10%,被控對象分別為100%負荷、75%負荷及50%負荷下的過熱汽溫對象模型,仿真結果見圖7~圖9.
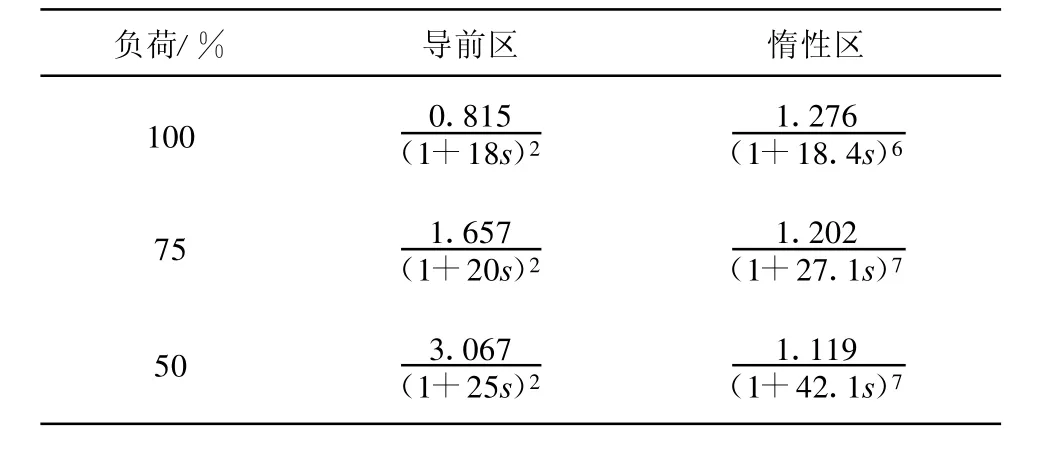
表1 過熱汽溫對象模型Tab.1 Plant model for superheated steam temperature
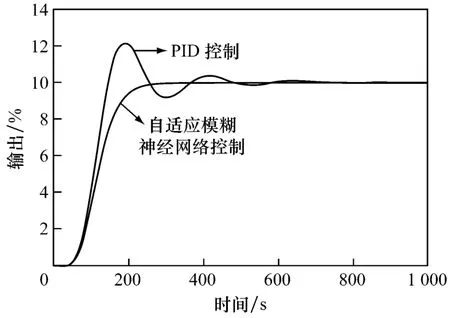
圖7 100%負荷下的響應曲線Fig.7 Response curve at 100%load
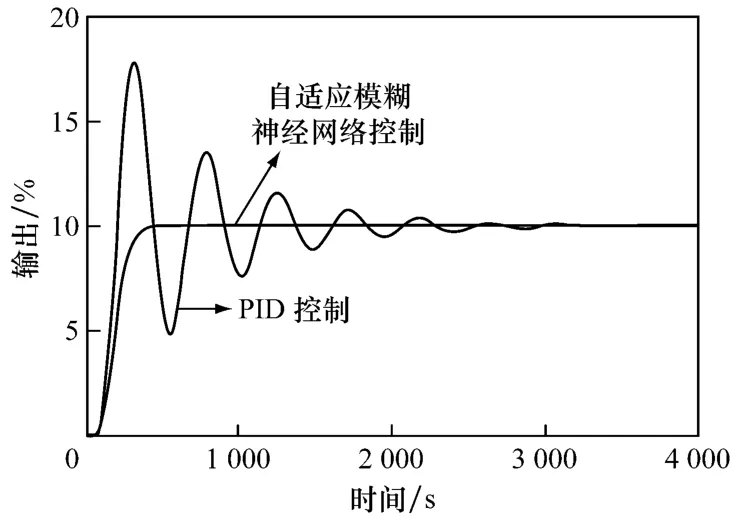
圖8 75%負荷下系統響應曲線Fig.8 Response curve at 75%load
從仿真結果看,自適應模糊神經網絡控制器具有良好的動、靜態特性.
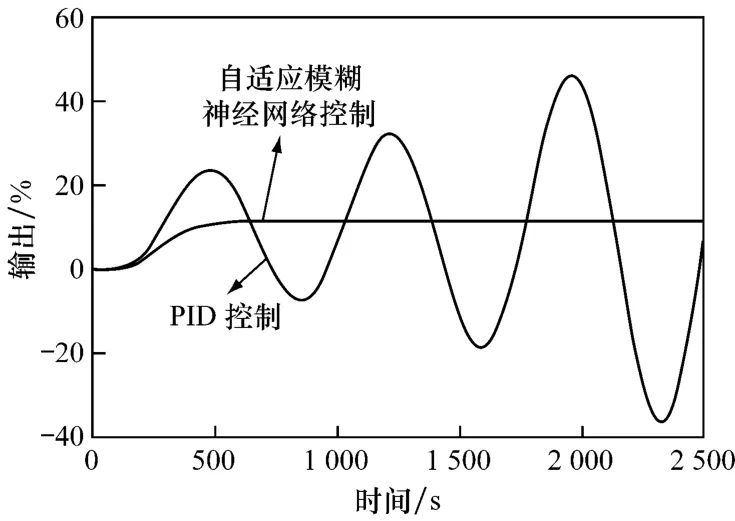
圖9 50%負荷下系統響應曲線Fig.9 Response curve at 50%load
被控對象仍采用上述汽溫模型,100%負荷下,在系統仿真至650 s時加入幅值為2%的干擾信號,仿真結果見圖10.
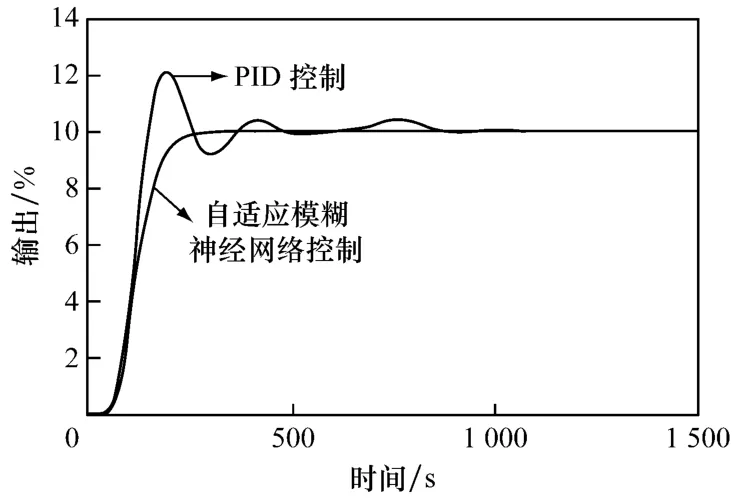
圖10 100%負荷下有干擾時的響應曲線Fig.10 Response curve at 100%load with existence of jamming
從仿真結果看,該控制器的抗干擾能力明顯優于常規PID控制器.
4 現場實際應用
4.1 分布式系統
汽溫控制系統采用主/從分布式計算機系統,主機為研化工業控制機,采用IPC-610標準機箱,從機采用美國艾默生Ovation DCS.DCS采用模塊化結構,擴展方便、可靠性高、維護性好.
4.2 運行控制效果
應用圖2的智能控制系統及上述的主/從分布式計算機系統,構成自適應模糊神經網絡汽溫控制系統,采用該系統及煤-水比輔助控制來實現某電廠600 MW超臨界直流鍋爐汽溫的自動控制,選擇采樣周期為40 s.該自動控制系統在現場實際投運后,當鍋爐負荷在大范圍內變化時,得到的現場運行記錄曲線見圖11.從圖中可以看出,采用自適應模糊神經網絡控制在變負荷時仍然具有良好的汽溫控制效果.
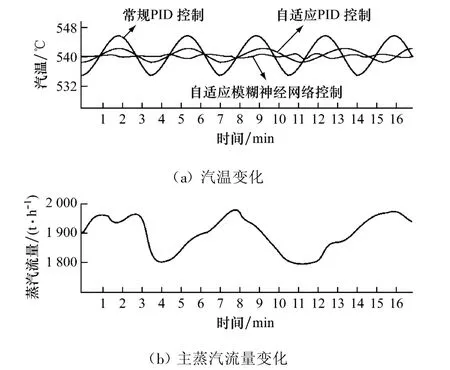
圖11 現場運行記錄曲線Fig.11 On-site operation curves
5 結 論
針對火電廠過熱汽溫對象的大延時、大慣性,本文提出的自適應模糊神經網絡控制策略克服了常規PID控制自適應能力差的缺點.另外,文中使用的模糊控制器克服了常規模糊控制器穩態精度不高和模糊規則難以確定等缺點.該控制方法對于復雜的被控對象也能取得良好的控制效果,表現出較好的動態品質、穩定性和抗干擾性等優點,具有較高的工程應用價值.
[1] 彭道剛,楊平,王志萍,等.火電廠主汽溫控制系統的免疫PID串級控制[J].動力工程,2005,25(2):234-238.PENG Daogang,YANG Ping,WANG Zhiping,et al.Immune PID cascade control of f resh steam temperature control system in fossil-fired power plant[J].Journal of Power Engineering,2005,25(2):234-238.
[2] 于希寧,程鋒章,朱麗玲,等.基于T-S模型的自適應神經模糊推理系統及其在熱工過程建模中的應用[J].中國電機工程學報,2006,26(15):78-82.YU Xining,CHENG Fengzhang,ZHU Liling,et al.ANFISmodeling based on T-S model and its application for thermal process[J].Proceedings of the CSEE,2006,26(15):78-82.
[3] 李國勇.智能控制及其MATLAB實現[M].北京:電子工業出版社,2005.
[4] 李向明,吳龍海.模糊神經網絡控制器的仿真研究[J].武漢理工大學學報,2003,25(1):13-16.LI Xiangming,WU Longhai.Simulation research of fuzzy neural network controller[J].Journal of Wuhan University of Technology,2003,25(1):13-16.
[5] 吳曉莉,林哲輝.MATLB輔助模糊系統設計[M].西安:西安電子科技大學出版社,2002.
[6] 曾蓉.火電廠主蒸汽溫度的模糊神經網絡控制系統的研究[D].重慶:重慶大學自動化學院,2007.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45