超短基線系統在ROV水下定位的應用研究
2011-10-25 02:46:24劉伯運劉燕紅邱金水王京齊
水上消防 2011年6期
□劉伯運 劉燕紅 邱金水 王京齊
一、概述
在實施水中消防作業、沉船打撈等救撈任務之前,首要的任務是要確切定位水下目標、了解水下情況。對海底失事船艇及其他沉沒物的水下定位是一項關鍵且高難度的作業,水下定位一般是在概位搜索的基礎上,利用聲納船及單 (雙)船拖掃方法并經潛水員水下探摸確定沉船的具體位置。隨著水下機器人技術的成熟,利用水下機器人進行水下定位作業也得到越來越廣泛的應用。
水下運載器 (Underwater Vehicle) 能在水下游動、攜帶特定器具以執行、完成特定任務的各種用途的運載器的統稱。遠距離操作潛水器(Remotely Operated Vehicle,簡稱ROV),這類水下機器人的最大優點是母船可以為其源源不斷地提供能源,因此,它能在水下長時間地工作,并且可以安裝機械手等作業工具,因此應用廣泛。
利用ROV進行水下定位目前通用的方法是利用水聲傳感器對ROV本體位置進行測量,并輔以其他的姿態傳感器,組成組合導航系統,可以得到高精度的水下位置信息。本文以海軍防救部隊配備的Ocean Modules V8 Sii型ROV為對象,介紹水下定位的原理、特點,同時對使用過程中影響定位精度性能的主要因素進行分析,從而提高對水下定位作業的認識。
二、Ocean Modules V8 Sii型ROV水下定位系統
Ocean Modules V8 Sii(Search-搜尋,Identification-識別,Intervention-干預)是一款多用途、開放和采用模塊化設計的水下遙控機器人。該型機器人可搭載多種傳感器和設備,如各種固定安裝攝像機、拱形透明罩安裝攝像頭、HD高清攝像頭和靜態攝像頭、鹵素燈、LED照明燈、聲納、機械手和各種傳感器,可根據用戶工作的需要配置成專業的、完美的水下工作載體。
Ocean Modules V8 Sii可以配備在大、中型打撈救生船上,與其它裝備配合執行300 m以淺的援潛救生和打撈沉船 (艇)、飛機、導彈、魚雷和有經濟、戰略價值的沉物等重要任務;通過配置水下作業工具,可進行多種援潛救生種水下作業;通過配置水下照相機、聲納等設備,可執行水下搜索、水下觀察等作業。
V8 Sii水下定位利用超短基線定位系統(USBL)。該型 USBL采用的是 Tritech Micron Nav公司生產的,硬件部分由水下傳感器組件、水面傳感器組件以及信號接口箱組成,如圖1所示。水下傳感器組件中,主要部分是短基線定位聲納的應答器;此外,還包括傾角傳感器,可以測量水下機器人本體的橫傾和縱傾;電子羅盤,用來測定艏向角;壓力傳感器通過機器人所處位置的壓力與水面壓力差來確定其深度。水面傳感器組件主要部分是短基線定位聲納5個水聽器,此外,還包括了傾角傳感器、壓力傳感器和電子羅盤測量信號接收器等。信號接口箱的輸入口直接與水面傳感器組件相連,輸出口可以通過RS232/RS485總線與后臺便攜式計算機相連,通過軟件處理進行水下準確定位,并可通過GPS信號輸入,實現水下導航、航線跟蹤等功能,工作流程以及硬件結構框圖如圖2所示。該水下定位系統工作深度750 m,典型水平跟蹤距離500 m,典型垂直距離150 m,距離精度:±2 m,方向精度:±3°,工作波束寬度:180°,位置上傳速率:0.5 s~10 s。

圖1 超短基線定位系統組件
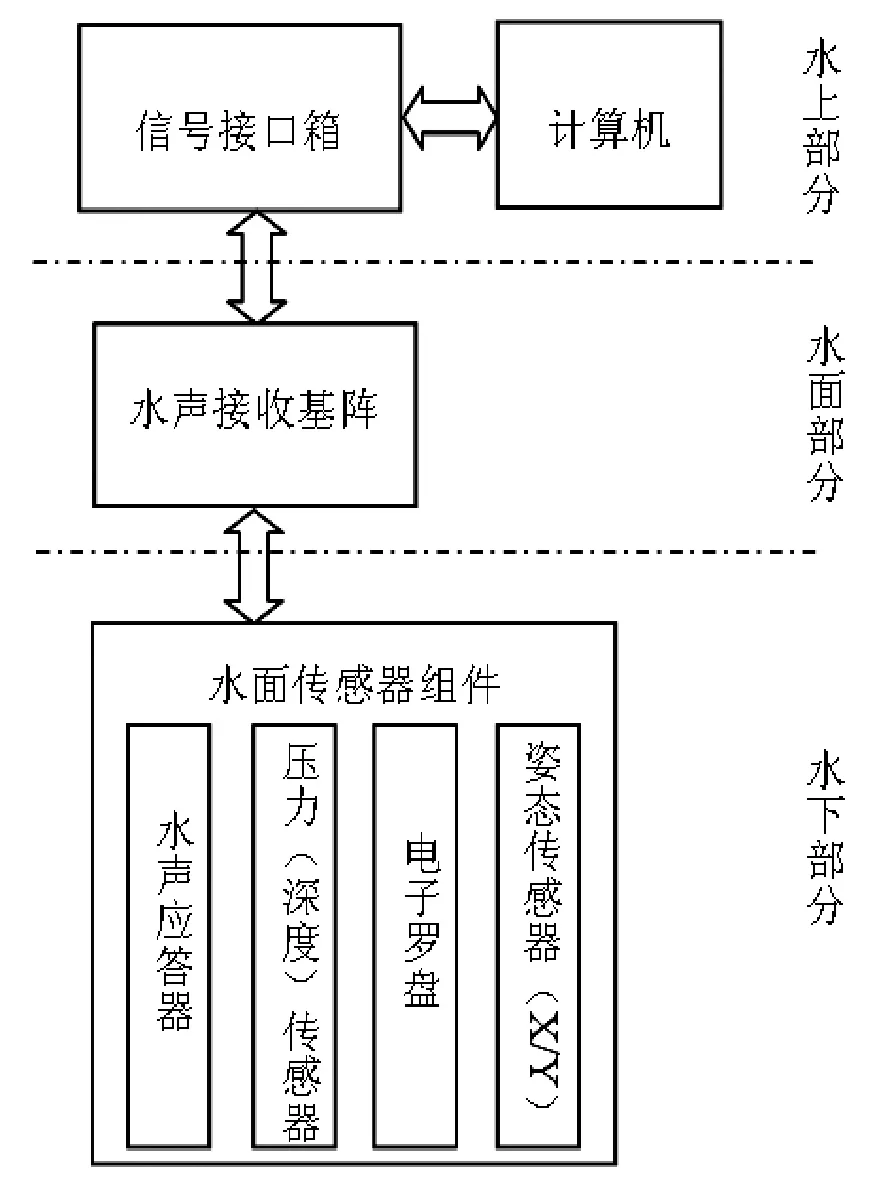
圖2 ROV水下定位系統結構框圖
三、超短基線水下聲學定位原理
利用電磁波和光波可以觀察遙遠的星球,但不能利用電磁波和光波遙測幾十米深的海底,因為海水對電磁波和光波有很強的吸收作用。目前,對水中物體進行探測和定位的有效手段是聲波。聲學定位系統開發于19世紀60年代,主要用于支持水下調查研究。此后,這類系統便在為拖體,ROV等水下目標的定位中成為了重要角色。
在聲學定位系統中,按照接收基陣的尺度或應答器基陣的基線長度來分類,水聲定位技術可以分為三種:長基線定位 (LBL),短基線定位 (SBL)和超短基線定位 (USBL),有些現代的定位系統能組合使用以上技術。
長基線水聲定位系統的基陣長度在幾公里到幾十公里,長基線定位能在寬廣的區域內提供高精度的位置,它需要至少3個應答器組成的陣列部署在海底上的已知點上,水面上的目標位置只安裝一個換能器。利用目標發出的信號到達接收陣各個基元的的斜距,從而計算出目標的坐標位置。短基線水聲定位系統需要在水面需要定位的目標單元上安裝至少3個換能器陣,基陣長度一般在幾米到幾十米的量程,換能器之間的位置關系為已知。利用目標發出的信號到達接收陣各個基元的時間差,從而計算出目標的位置。超短基線水聲定位系統的基陣長度一般在幾個厘米到幾十厘米的量級,它是各個基元接收信號間的相位差來解算目標的方位和距離。
這三種不同方式的聲學定位系統中,長基線定位 (LBL)定位精度最高,但是水底布設高精度定位已知點的施工難度大且費用較高,一般使用在石油平臺監測、水下考古打撈等需要高精度定位的工程。短基線定位 (SBL)需要對船體進行改造,才能放置換能器基陣,對船只的要求使短基線的應用受一定的限制。因此,超短基線聲學定位系統 (SSBL)的優勢是很明顯的:只需要在船舶上安裝一個換能器及其電子單元,就可以提供高精度的聲學定位。
應用由三個水聽器組成的最簡單的超短基陣進行ROV動力定位的原理如圖3所示。其中,一只信標安裝在ROV載體上,由水聲接收基陣發射聲詢問信號,信標接收到詢問信號經過一個固定的時間延時返回應答信號,通過測量聲波在水中的傳播時間可以計算出ROV和母船間的斜距,同時測量接收器基陣各個接收換能器間的相位差,便可以計算出水下機器人相對于母船的位置坐標。
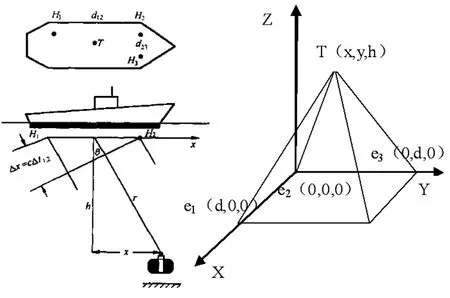
圖3 超短基線水下定位原理圖
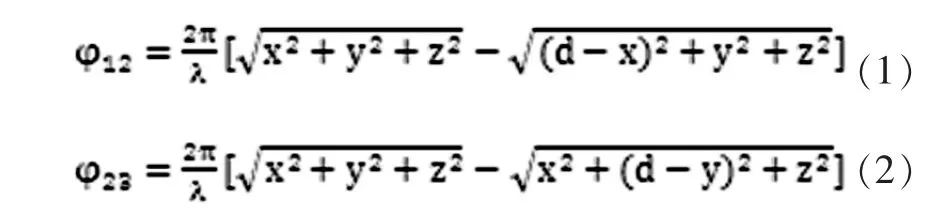
采用直角三角形基陣,陣元間距為d,x軸指向母船船首方向,三個基元的坐標為: (d,0, 0)、(0, 0, 0)、(0, d, 0) ;目標坐標為:T(x,y,z)。以2號基元為基準,可以得到其他兩個基元和的相位差:
坐標原點和目標之間的斜距r為:
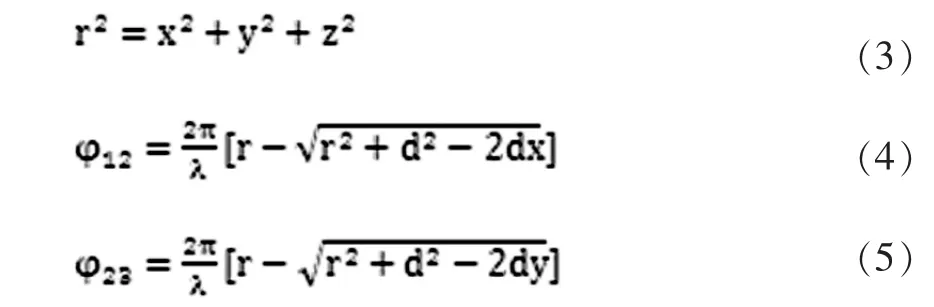
注意到r≥d,用泰勒技術展開,取近似得:
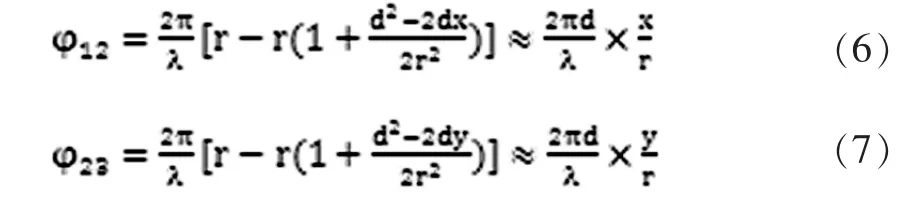
式 (6,7)中,φ12、φ22分別為兩個水聽器接收到的的信號與參考基元間的相位差,這是可以測得的,λ為水中聲波波長。Z坐標可以由深度傳感器測量得到,為此,利用上式即可求出 ROV 水下位置 (x, y, z)。
如果系統選配了GPS定位系統,對ROV還可以預設運動路線,實現無人自動例行檢測等功能。
四、超短基線水聲定位系統誤差分析
水下定位的主要誤差來源,包括超短基線基陣測距誤差、超短基線基陣陣元相位差引起的誤差、聲傳播引起的誤差、聲學噪聲引起的誤差、水下工作環境引起的誤差、載體運動速度變化引起的誤差等。
測距誤差主要是由測時誤差引起的,而測時誤差又與信噪比和聲速息息相關。聲波在水下傳播過程中,聲速、聲線彎曲、水面反射等都會影響測時準確度,而聲波的擴散、吸收和環境中的噪聲會影響信噪比大小,因此測距誤差主要是由水聲學因素引起的,水下定位時的工作條件和工作方法直接影響定位精度。
超短基線定位系統的定位精度是由被測載體到各個應答器的距離r和應答器陣的幾何精度兩個方面的因素決定的。目標到達基陣的斜距r是水中聲速c和詢問—應答的時間t的函數。而聲速c與基陣所在區域的海水的深度、鹽度、溫度等有關,所以用聲波在水中傳播的平均速度來計算距離,將導致較大的誤差。為了準確測出距離,必須根據工作區域的聲速剖面,計算聲線軌跡,得出載體和各個應答器之間的幾何斜距與相位差準確的關系式。
五、小結
隨著無人機、無人戰車、機器士兵逐漸在戰場上顯示越來越大的威力,無人化戰爭的發展已經呈現出相對清晰的藍圖。同樣,在水中消防作業、救撈工程等作業過程中,無人化水下作業也應該成為一種潮流。目前防救部隊配置的Ocean Modules V8 Sii型水下機器人已在各類水下作業過程中發揮出重要的作用,可以預見,不久的將來必將有更多的水下機器人發揮越來越重要的作用。★
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國生殖健康(2019年3期)2019-02-01 06:12:26
故事大王(2016年7期)2016-09-22 17:30:08
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
兒童故事畫報(2013年3期)2013-06-24 05:40:30