基于TDC的GPS馴服恒溫晶振系統設計
2011-09-28 07:48:58陸加海張同雙陶小紅陳浩謙李春海
電訊技術 2011年12期
陸加海,張同雙,陶小紅,陳浩謙,李春海
(1.上海交通大學,上海200030;2.中國衛星海上測控部,江蘇江陰 214431)
1 引 言
測控系統要求有高精度的時間頻率系統。為了保持站點間時間同步,一般采用銣原子鐘或恒溫晶振(Oven-Controlled Crystal Oscillator,OCXO)來提供時間頻率信號。前者的成本較高,后者頻率準確度較差,不能滿足測控系統的指標要求。
為解決上述問題,本文采用GPS對恒溫晶振進行馴服,綜合了GPS時間信號長穩指標高的優點和恒溫晶振短穩指標高的優點,從而獲得了高穩定度和高準確度的頻率信號。
為了計算恒溫晶振相對于GPS的頻率偏差,需要長時間測量GPS秒信號與恒溫晶振分頻信號之間的時差,通過時差計算得到頻率偏差,再根據頻率偏差來校準恒溫晶振,所以時差測量的精度直接影響到頻率馴服的精度。文獻[1]采用FGPA延遲線內插法測時差,測量精度達到121 ps,但測量線性化較差、成本高。文獻[2]介紹了模擬內插法測時差,測量精度達到400 ps,但易受噪聲干擾、實現困難;
本文采用時間數字轉換器(Time to Digital Converter,TDC)測量時差,精度達到250 ps,極大減小了測量誤差,且設計簡單、成本低,有效實現了GPS馴服恒溫晶振系統的設計。
2 系統設計
2.1 系統硬件組成
系統組成框圖如圖1所示,主要由GPS模塊、TDC時間數字轉換器、分頻模塊、數據處理單元、D/A轉換模塊和恒溫晶振等組成。GPS模塊用于輸出標準的GPS秒脈沖信號,分頻模塊將恒溫晶振頻率信號分頻成1 PPS信號送TDC模塊,TDC模塊用于測量恒溫晶振分頻1 PPS信號與GPS秒信號之間的時差,數據處理單元對時差數據進行處理后得到恒溫晶振相對于GPS的頻率偏差,并控制D/A轉換模塊對恒溫晶振進行頻率修正。

圖1 系統組成框圖Fig.1 Block diagram of the system
2.2 時差測量電路設計
TDC是時間數字轉換器的英文縮寫。這類芯片把時差直接轉化為高精度的數字值。它們被描述為與ADC(模擬數字轉換器)功能相似的器件。通常TDC是用在分辨率小于1 ns的測量場合。本設計使用TDC-GP1芯片進行測量,其測量電路框圖如圖2所示。將待測的GPS秒信號和晶振1 PPS信號送TDC模塊;START信號由分頻模塊產生并送TDC模塊,用于控制測量時序。TDC模塊將時差轉化為數字值送數據處理單元。

圖2 時差測量電路框圖Fig.2 Block diagram of time difference measurement circuit
時差在TDC模塊的測量時序如圖 3所示,將GPS秒信號與恒溫晶振分頻得到的1 PPS信號進行比對,得到的時間間隔即是待測的時差。

圖3 時差測量時序圖Fig.3 Time difference measurement timing diagram
圖3中START信號為測試開始信號,GPS秒信號與晶振1 PPS信號之間的時間間隔T為待測的時差。信號脈沖寬度要求大于2.5 ns,開始信號與被測信號之間時間間隔要求大于3 ns、小于7.6 μ s。
為了保證每次被測信號落在允許的測量范圍內。測量開始之前應進行初步的時間同步,確保GPS秒與晶振1 PPS之間的時差小于3 μ s。START信號通過將GPS秒延時約999 996 μ s后產生,確保START信號與GPS秒信號之間的時差保持在4 μ s左右。
2.3 分頻模塊的設計
分頻模塊采用CPLD設計實現,通過CPLD分頻計數將恒溫晶振的10 MHz頻率信號分頻為1 PPS信號,同時將 GPS秒延時999 996 μ s后生成 START信號,確保START信號超前GPS秒信號4 μ s。當晶振1 PPS與GPS秒之間的時差大于3 μ s時通過計數器清零的方法進行同步,確保兩者之間的時差小于3 μ s。其時序如圖4所示。
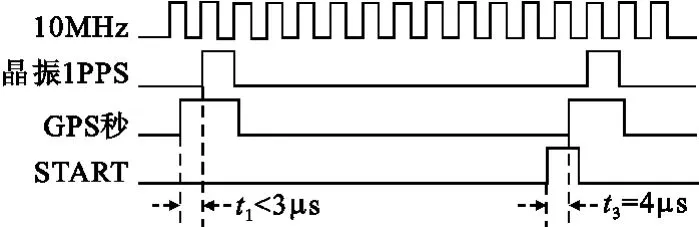
圖4 分頻模塊時序圖Fig.4 Timing diagram of frequency division module
3 數據處理
根據頻率和周期互為倒數的關系,可采用測時差的方法[4](以GPS的秒信號為參考)來測量本地頻率源的頻率準確度(Δf/f),作為校頻的依據。計算公式如下:

按照公式(1)可以計算出恒溫晶振相對于GPS的頻率偏差[5],其中 Δt2、Δt1分別為 t2、t1時刻測得的晶振1 PPS與GPS秒之間的時差值。根據頻率偏差的大小,將需要調整的頻率偏差量轉換為模擬電壓施加在壓控恒溫晶振的電壓控制端,便可以實現對恒溫晶振進行頻率修正。
但GPS信號在傳輸過程中存在各種干擾[3],這些干擾造成GPS輸出的秒信號存在一定的抖動,其短穩較差。通過對時差值進行遞推平均濾波可以有效消除GPS秒信號抖動的影響[6]。取測量得到的時差數據 Δt1,Δt2,Δt3,…,Δtn,…,以 n 作為窗口長度對其中的n個測量值取平均,通過移動窗口得到新的時差數據序列[1]ΔT1,ΔT2,ΔT3,…,ΔTn,…,如公式(2)所示:

為了使頻率準確度 Δf/f測量更準確,對遞推平均濾波算法進行優化,取 ΔTj,ΔTn+j,ΔT2n+j,ΔT3n+j,…,ΔTmn+j,…,作為實際測量序列進行計算,如公式(3)所示:

將式(2)代入式(3)得到
圖5是使用本系統測量得到的恒溫晶振相對于GPS系統的時差曲線,該曲線由于GPS秒信號抖動而存在一定的波動,使用這些數據計算得到的頻率偏差也會受到影響而發生波動,所以不能直接使用。圖6是添加遞推平均濾波處理后得到的時差數據,其濾波窗口n設置為120。濾波后時差數據的抖動減小約兩個數量級。

圖5 時差數據濾波前曲線Fig.5 Curve before time difference data filtering

圖6 時差數據濾波后曲線Fig.6 Curve after time difference data filtering
頻率調節通過16位DAC(數字模擬轉換器)實現,將需要調整的頻率偏差值轉換為模擬電壓,施加在恒溫晶振的控制電壓輸入端,實現對恒溫晶振頻率的調控。
4 試 驗
本設計中采用MV180 OCXO雙層恒溫晶振,其頻率牽引范圍為±3×10-7,外部控制電壓范圍為0~+5 V。GPS模塊采用Motolora M12+,在位置保持模式下,輸出秒信號的抖動方差 σ<20 ns。時間數字轉換器使用TDC-GP1芯片,其測量精度達到250 ps,測量誤差遠小于GPS秒信號抖動引入的誤差。16位數模轉換芯片采用DAC8571,其輸出電壓對恒溫晶振的理論頻率調諧靈敏度優于1×10-11。圖7所示為根據濾波后的時差數據計算得到的頻率準確度曲線。不采用濾波算法頻率馴服時間為數個小時,采用濾波算法后頻率馴服時間縮短為約1 200 s。實驗表明,馴服后恒溫晶振的頻率準確度優于3×10-11。

圖7 馴服后頻率準確度曲線Fig.7 Tamed frequency accuracy curve
5 小 結
本文通過采用時間數字轉換器測量時差,簡化了GPS馴服恒溫晶振系統的硬件設計,測量精度達到250 ps,極大減小了測量誤差。設計了優化的遞推平均濾波算法對時差數據進行濾波處理,消除了GPS秒信號抖動引入的干擾,縮短了頻率馴服時間。頻率馴服時間約為1 200 s,與國內同類應用相比,縮短約一個數量級;頻率馴服精度優于3×10-11。
[1]盧祥弘,陳儒軍,何展翔.基于FPGA的恒溫晶振頻率校準系統的設計[J].電子技術應用,2010(7):104-107.LU Xiang-hong,CHEN Ru-jun,HE Zhan-xiang.The designof frequency calibrationsystem for OCXO based onFPGA[J].Measurement Control Technology and Instruments,2010(7):104-107.(in Chinese)
[2]孫杰,潘繼飛.高精度時間間隔測量方法綜述[J].計算機測量與控制,2007,15(2):145-148.SUN Jie,PAN Ji-fei.Methods of High Precision Time-Interval Measurement[J].Computer Measurement&Control,2007,15(2):145-148.(in Chinese)
[3]單慶曉,楊俊.衛星馴服時鐘系統的新進展[J].測試技術學報,2009,23(5):396-401.SHAN Qing-xiao,YANG Jun.Review of Satellite Disciplined Clock System[J].Journal of Test and Measurement Technology,2009,23(5):396-401.(in Chinese)
[4]楊旭海,翟惠生,胡永輝,等.基于新校頻算法的GPS可馴銣鐘系統研究[J].儀器儀表學報,2005,26(1):41-44.YANG Xu-hai,ZHAI Hui-sheng,HU Yong-hui,et al.Study on GPS Disciplined Rb Clock Based on New Frequency Accuracy Measurement Algorithm[J].Chinese Journal of Scientific Instrument,2005,26(1):41-44.(in Chinese)
[5]ValdesM D,Villares IFarina J,Moure M J.A FPGA-based frequency measurement system for high—accuracy QCM sensors[J].Industrial Electronics,2008,34(11):1707-1712.
[6]Cadenas O,Megson G.Pipelining considerations for an FPGA case[C]//Proceedings of 2001IEEE International Symposium on Digital Systems Design.Warsaw,Poland:IEEE,2001:276-283.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
