機(jī)載LIDAR系統(tǒng)校準(zhǔn)方案優(yōu)化設(shè)計
2011-09-25 03:58:34張漢德劉焱雄別君單瑞黃永軍張健
海洋通報 2011年1期
關(guān)鍵詞:系統(tǒng)
張漢德,劉焱雄,別君,單瑞,3,黃永軍,張健
(1.中國海監(jiān)北海航空支隊,山東 青島 266033; 2.國家海洋局第一海洋研究所,山東 青島 266061;3.青島海洋地質(zhì)研究所,山東 青島 266071; 4.天津海事局海測大隊,天津 300220)
機(jī)載LIDAR系統(tǒng)校準(zhǔn)方案優(yōu)化設(shè)計
張漢德1,劉焱雄2,別君1,單瑞2,3,黃永軍4,張健2
(1.中國海監(jiān)北海航空支隊,山東 青島 266033; 2.國家海洋局第一海洋研究所,山東 青島 266061;3.青島海洋地質(zhì)研究所,山東 青島 266071; 4.天津海事局海測大隊,天津 300220)
為優(yōu)化機(jī)載LIDAR(Light Detection and Ranging)系統(tǒng)校準(zhǔn)方案,基于天津、煙臺和舟山3個標(biāo)準(zhǔn)檢校場的試驗(yàn)數(shù)據(jù),分析比較不同檢校場地、不同飛行航高和不同飛行航速對激光掃描數(shù)據(jù)檢校結(jié)果的影響,探索激光掃描器脈沖能量大小、激光掃描儀視場角、掃描頻率等參數(shù)設(shè)置對激光掃描數(shù)據(jù)檢校結(jié)果的影響,最終提供了最優(yōu)的激光掃描系統(tǒng)校準(zhǔn)方案。
機(jī)載LIDAR;校準(zhǔn);方案優(yōu)化
Abstract:To optimize the calibration scheme of airborne LIDAR (Light Detection and Ranging) system, this research aimed at analyzing and comparing the impacts on the calibration results of laser scanning datasets, which were caused by different test area, flying altitude and speed.Three test areas which are Tianjin, Yantai and Zhoushan were employed in the experiment.Besides, some other parameters are considered, such as pulse magnitude of laser scanner, scanning field of view, scanning frequency.In the end, an optimal LIDAR calibration scheme are offered.
Keywords:Airborne LIDAR; calibration; scheme optimization design
1 引 言
我國擁有豐富的海岸帶資源。監(jiān)測海岸帶的動態(tài)變化是保護(hù)、開發(fā)和管理海岸帶最基礎(chǔ)性的工作內(nèi)容之一。長期以來,由于海岸帶地區(qū)(特別是沿海灘涂)的環(huán)境復(fù)雜、勘測條件困難,現(xiàn)有的陸地和船載測量儀器難以有效使用,造成該區(qū)域一直依靠人工作業(yè)的落后局面,生產(chǎn)效率低、勞動強(qiáng)度大、作業(yè)危險性高、空白區(qū)域多,測量精度難以滿足要求,迫切需要新的技術(shù)手段和設(shè)備來改變這一現(xiàn)狀。
基于激光掃描(Light Detection And Ranging,簡稱LIDAR)技術(shù)的航空遙感調(diào)查具有快速、機(jī)動、靈活和節(jié)省費(fèi)用等突出優(yōu)勢,能夠準(zhǔn)確獲取地表高精度、高密度的高程數(shù)據(jù)。該系統(tǒng)不僅能快速獲取高程數(shù)據(jù),且在遙感測圖及其他領(lǐng)域取得了一系列技術(shù)突破,在地形測繪、環(huán)境檢測、三維城市建模、洪水災(zāi)害監(jiān)測、海冰監(jiān)測等諸多領(lǐng)域具有廣泛的發(fā)展前景[1-5]。國家海洋局于2006年引進(jìn)了3套Leica公司的商用機(jī)載LIDAR系統(tǒng),具體型號為ALS50,裝備在海洋局下屬的3個海監(jiān)航空支隊,主要用于海岸帶地區(qū)的監(jiān)測。
機(jī)載 LIDAR系統(tǒng)出現(xiàn)的時間不長,不同技術(shù)之間的融合問題尚未得到很好的解決,例如,GPS天線的相位中心、LIDAR掃描中心和CCD相機(jī)中心并不重合,在使用 LIDAR系統(tǒng)之前,需要標(biāo)定這些設(shè)備之間的系統(tǒng)性差異。由于缺少統(tǒng)一的標(biāo)準(zhǔn),機(jī)載 LIDAR系統(tǒng)校準(zhǔn)工作一般都是由作業(yè)單位獨(dú)立完成,方法也不太一樣。為了優(yōu)化機(jī)載LIDAR統(tǒng)的校準(zhǔn)方案,國家海洋局先后在天津、煙臺和舟山建立了3個標(biāo)準(zhǔn)檢校場。本文根據(jù)標(biāo)準(zhǔn)檢校場的試驗(yàn)數(shù)據(jù),分析比較了不同檢校場地、不同飛行航高和不同飛行航速對激光掃描數(shù)據(jù)檢校結(jié)果的影響,探索激光掃描器脈沖能量大小、激光掃描儀視場角、掃描頻率等參數(shù)設(shè)置對激光掃描數(shù)據(jù)檢校結(jié)果的影響,擬提供最優(yōu)的激光掃描系統(tǒng)校準(zhǔn)方案。
2 機(jī)載LIDAR系統(tǒng)組成
機(jī)載LIDAR系統(tǒng)主要有4個組成部分。包括:(1)動態(tài)差分 GPS接收機(jī),用于測定激光信號發(fā)射時刻參考點(diǎn)的坐標(biāo);(2)姿態(tài)測量系統(tǒng),采用慣性測量單元IMU或多GPS天線陣列,用于測定掃描裝置主光軸的姿態(tài)參數(shù);(3)激光掃描儀,用于測定激光發(fā)射參考點(diǎn)至地面激光腳點(diǎn)之間的距離;(4)成相裝置(多為CCD相機(jī)),記錄地面真實(shí)影像,為后續(xù)數(shù)據(jù)處理提供參考。工作原理如圖1所示[6]。
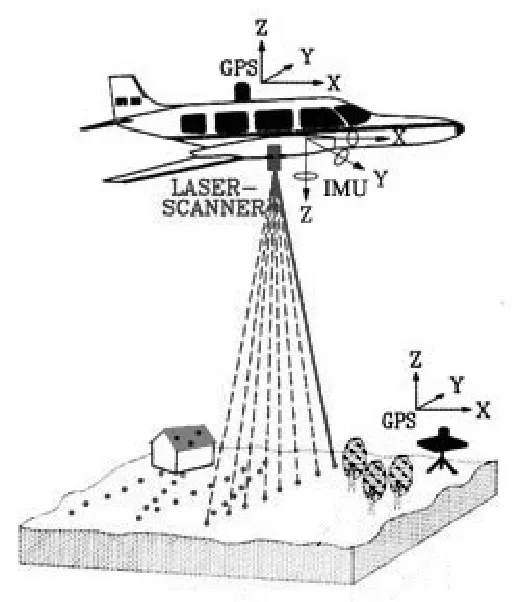
圖1 機(jī)載LIDAR系統(tǒng)組成及工作原理[6]Fig.1 System components and working principle of airborne LIDAR[6]
機(jī)載LIDAR受到多種誤差的影響。其中GPS接收機(jī)、IMU、激光掃描儀和 CCD等設(shè)備的中心不重合、軸向不平行,存在系統(tǒng)性誤差。系統(tǒng)誤差會給激光腳點(diǎn)的坐標(biāo)帶來系統(tǒng)性的偏差。國內(nèi)外已有不少學(xué)者對影響機(jī)載激光掃描測量精度的系統(tǒng)誤差進(jìn)行了分析[7-10],但是對系統(tǒng)校準(zhǔn)算法和數(shù)據(jù)質(zhì)量控制研究較少。
3 校準(zhǔn)試驗(yàn)及方案優(yōu)化設(shè)計
3.1 試驗(yàn)概況
為尋求最優(yōu)化的機(jī)載 LIDAR系統(tǒng)校準(zhǔn)方案,根據(jù)不同的地形、地貌和地物特征,國家海洋局北海航空支隊先后在天津、煙臺和舟山建立了標(biāo)準(zhǔn)檢校場(如圖2-圖4)。有針對性地在3個校準(zhǔn)場進(jìn)行了多次校準(zhǔn)飛行試驗(yàn)。
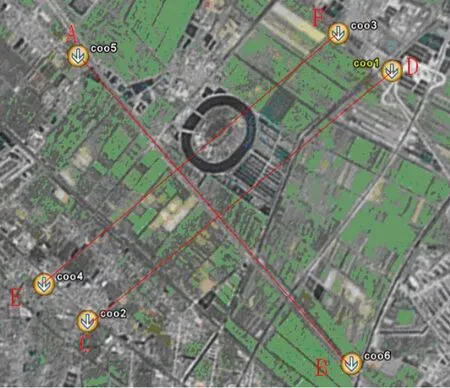
圖2 天津校準(zhǔn)場及校準(zhǔn)航線設(shè)計示意圖Fig.2 Test area and the flight route design in Tianjin City

圖3 煙臺校準(zhǔn)場及校準(zhǔn)航線設(shè)計示意圖Fig.3 Test area and the flight route design in Yantai City

圖4 舟山校準(zhǔn)場及校準(zhǔn)航線設(shè)計示意圖Fig.4 Test area and the flight route design in Zhoushan City
針對機(jī)載 LIDAR的校準(zhǔn)特點(diǎn),需要設(shè)計如下幾條航線:
(1)垂直于道路方向,跨越道路,異向重疊的兩條航線;
(2)垂直于尖頂房屋的屋脊線方向,經(jīng)過屋脊正上空,異向重疊的兩條航線;
(3)垂直于尖頂房屋屋脊線方向,平行同向的兩條航線,兩航帶數(shù)據(jù)都覆蓋該尖屋頂。
(4)位于道路的正上方,沿著道路方向飛行的一條航線。
在實(shí)際工作中,根據(jù)具體情況進(jìn)行航線設(shè)計。多數(shù)情況下,屋脊線與道路平行,此時(1)和(2)的要求可由兩條異向重疊的航線同時滿足(如圖5中的CD、DC),(2)和(3)也可共用一條航線(如圖5中的CD線)。
當(dāng)集成了CCD相機(jī)時,還需針對機(jī)載CCD相機(jī)的校準(zhǔn)特點(diǎn),設(shè)計四條航線,成井字形(如圖3和圖4中的AB、GH、CD、EF)。
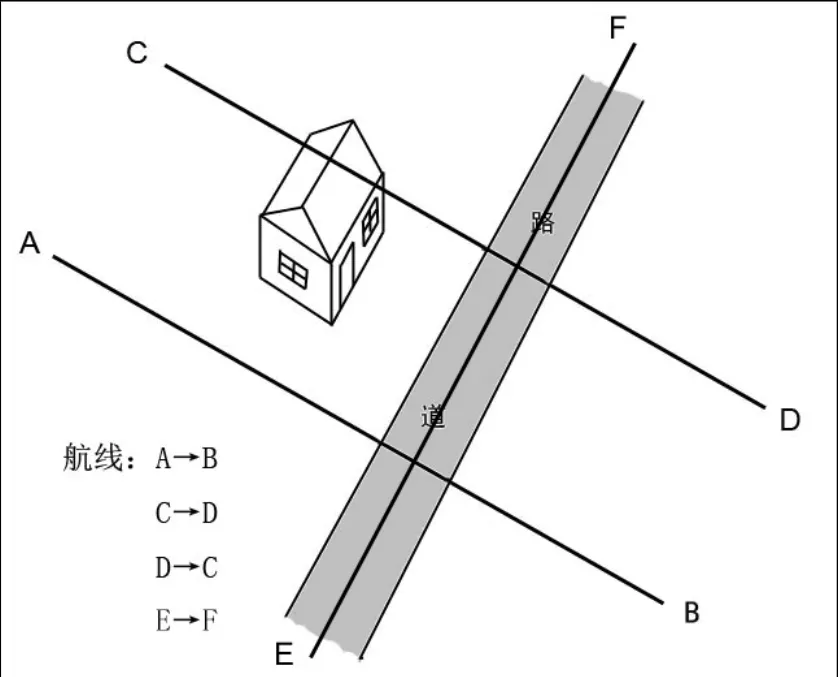
圖5 飛行試驗(yàn)航線圖Fig.5 Flight route design
3.2 激光掃描器安裝角度誤差的校準(zhǔn)優(yōu)化
安裝激光掃描儀時,其對應(yīng)的坐標(biāo)系軸線不可能與飛機(jī)坐標(biāo)系的軸線完全一致,存在側(cè)滾角(Roll)、俯仰角(Pitch)和航偏角(Heading)3個方向的定向誤差。定向誤差的校準(zhǔn),采用試值法進(jìn)行求解。
(1)側(cè)滾角(Roll)
選擇垂直于道路來回飛行的航線數(shù)據(jù)(如圖5中CD、DC)進(jìn)行分析。在生成的點(diǎn)云數(shù)據(jù)中,分別做一個包含道路區(qū)域的擬合面(Surface)。在TerraScan中沿道路方向?qū)@兩個Surface做道路上的剖面,這兩個剖面在豎直方向會存在夾角,量出這兩個剖面在兩端端點(diǎn)附近的高度差,除以所量兩點(diǎn)之間的寬度,得到一個校驗(yàn)值,根據(jù)飛行的方向確定校驗(yàn)值的正負(fù),重新輸入到ALS PP中再次生成點(diǎn)云數(shù)據(jù)。重復(fù)上面的操作直到兩個剖面完全吻合。
(2)俯仰角(Pitch)
選擇垂直于尖頂房屋屋脊線方向,在尖屋頂正上空來回飛行的航線數(shù)據(jù)(如圖5中CD、DC)進(jìn)行分析。在生成的點(diǎn)云數(shù)據(jù)中畫出一塊包含這個屋頂?shù)膮^(qū)域,分別做兩個Surface。在兩個Surface中沿垂直于屋脊線方向分別做這個屋頂?shù)钠拭妫B置顯示兩個剖面。這兩個剖面在水平方向上會存在平移,量出這個平移量,除以飛行的高度,得到一個校驗(yàn)值,根據(jù)飛行的方向確定校驗(yàn)值的正負(fù),重新輸入到ALS PP中再次生成點(diǎn)云數(shù)據(jù)。重復(fù)上面的操作直到兩個剖面完全吻合。
(3)航偏角(Heading)
選擇垂直于尖頂房屋屋脊線方向,兩條平行同向飛行的航線數(shù)據(jù)進(jìn)行分析(如圖5中AB和CD)。和 Pitch的校驗(yàn)一樣,要求包含尖屋頂,在這塊區(qū)域分別創(chuàng)建Surface。在兩個Surface中沿垂直于屋脊線方向分別做這個屋頂?shù)钠拭妫B置顯示兩個剖面。這兩個剖面在水平方向上會存在平移,量出這個平移量,除以兩條航線之間的距離,得到一個Heading的校驗(yàn)值。根據(jù)飛行的方向確定 Heading校驗(yàn)值的正負(fù),重新輸入到ALS PP中再次生成點(diǎn)云數(shù)據(jù)。重復(fù)上面的操作直到兩個剖面完全吻合。
(4)3個角度的校準(zhǔn)順序
在校準(zhǔn)過程中,Roll、Pitch、Heading某一個角度的校準(zhǔn)誤差會在一定程度上使其他角度的校準(zhǔn)效果受到影響,因此往往需循環(huán)多次校準(zhǔn)。三個角度的校準(zhǔn)順序?qū)ψ罱K的校準(zhǔn)精度無明顯影響,但本次試驗(yàn)結(jié)果表明roll→pitch→heading這樣的順序效率最高。
3.3 結(jié)果分析及方案優(yōu)化
(1)基站布設(shè)的影響
以天津機(jī)場附近試驗(yàn)區(qū)為例,共設(shè)計了4組不
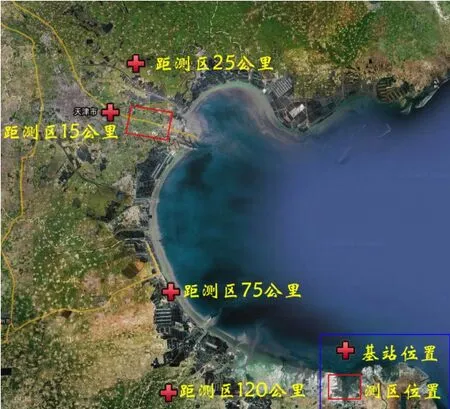
圖6 天津基站布設(shè)示意圖Fig.6 Base station layout diagram of Tianjin test area
同方案,基站架設(shè)與測區(qū)的距離分別為15 km(機(jī)場)、25 km(潘莊)、75 km(南排河)和120 km(大山)。具體位置如圖6所示。為檢驗(yàn)系統(tǒng)的高程精度,在試驗(yàn)區(qū)中,采用GPS RTK測量方法現(xiàn)場測定了24個地面檢核點(diǎn)。將利用4組不同基站得到的處理結(jié)果與檢核點(diǎn)比對,得到高程精度,見表1。
4組結(jié)果中,25 km處基站所對應(yīng)的數(shù)據(jù)高程精度最低,經(jīng)分析,該基站周邊有較高大的遮擋物,是帶來誤差的重要因素之一。剩下3個不同距離基站所對應(yīng)的數(shù)據(jù)高程中誤差隨基站距離增大而增大。由此可得,基站架設(shè)地點(diǎn)盡可能離測區(qū)近(在測區(qū)內(nèi)更好)。另外,基站架設(shè)時還應(yīng)遵循以下原則:周邊地面開闊;遠(yuǎn)離水體;無建筑物遮擋;周圍無大型無線電發(fā)射及高壓電裝置。
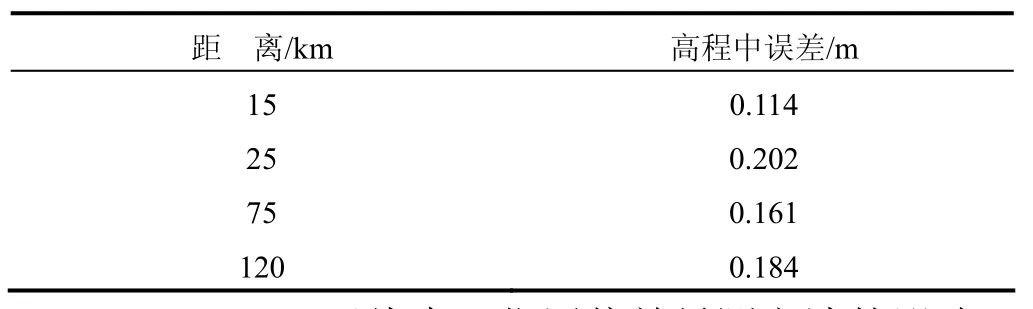
表1 高程精度比對結(jié)果Tab.1 Comparing results of elevation accuracy
(2)GPS天線中心位置偏差量測方法的影響
本次試驗(yàn)采用的偏差量測方法有忽略偏差、目視估計量測以及全站儀精確量測3種方法。經(jīng)過對比研究,以全站儀量測的精度為最高,但也最為費(fèi)時費(fèi)力,具體檢校時應(yīng)視數(shù)據(jù)獲取的精度要求來選擇所采用的GPS相位偏差量測方法,忽略偏差的方法不可取,精度要求不太高時,用目視估計量測是較為合適的選擇。
(3)不同檢校場地的影響
校準(zhǔn)場地需具備較長且有一定寬度的平坦地面,同時有一個尖頂?shù)姆课荨1敬卧囼?yàn)選取了多種不同質(zhì)地、不同地物組成的校準(zhǔn)場地。試驗(yàn)表明,場地的粗糙度直接影響校準(zhǔn)精度,草地、小路等不適合用于Roll值的校準(zhǔn),人工修建的較寬較長且直的水泥或柏油路面為理想的選擇;面積大一些的有人字形尖頂?shù)姆课輰τ赑itch、Heading的校準(zhǔn)效果比較好。
(4)不同飛行高度的影響
試驗(yàn)共采用750 m、1 000 m、1 250 m 3組不同航高的校準(zhǔn)數(shù)據(jù)進(jìn)行對比。結(jié)果表明:在可用的平直路面足夠長的前提下,飛行高度越高,越容易獲得較為準(zhǔn)確的Roll校準(zhǔn)值。實(shí)際工作時,校準(zhǔn)飛行高度也不宜過高,一般不超過2 400 m,原因在于航高太高會導(dǎo)致點(diǎn)間距大、測距精度不能保證,同時也會給飛行作業(yè)人員帶來身體上的不適。
對于Pitch、Heading的校準(zhǔn),飛行高度越低,所獲取屋頂上的點(diǎn)密度越大,校準(zhǔn)值越準(zhǔn)。但是,飛行的最低高度一般不宜低于400 m,以免激光對人眼造成傷害。因此,在實(shí)際作業(yè)時,應(yīng)當(dāng)根據(jù)實(shí)際需要選擇合適的飛行高度。
(5)航速、掃描頻率的影響
在其他因素都相同的情況下,不同飛行速度、不同掃描頻率影響所獲得的檢校數(shù)據(jù)的點(diǎn)間距離不同,點(diǎn)間距小則檢校效果好。因此,在系統(tǒng)允許的情況下,航速越慢、掃描頻率越高,所獲得的數(shù)據(jù)越有利于檢校精度的提高。
(6)視場角的影響
試驗(yàn)采用了 55°和 62°兩種不同視場角。視場角大小對校準(zhǔn)精度有一定的影響,減小視場角可提高校準(zhǔn)精度。因?yàn)槔走_(dá)數(shù)據(jù)條帶的邊緣精度比中間的要低,減小了視場角就是提高了雷達(dá)數(shù)據(jù)本身的精度,從而提高了校準(zhǔn)結(jié)果的精度。
4 總 結(jié)
機(jī)載LIDAR系統(tǒng)由GPS接收機(jī)、IMU、激光掃描儀和DSS相機(jī)組成,各設(shè)備之間由于幾何中心不重合,主要軸向也不平行,對最終的量測結(jié)果不可避免地產(chǎn)生系統(tǒng)性差異。為此,在機(jī)載 LIDAR系統(tǒng)工作之前,必須進(jìn)行系統(tǒng)的校準(zhǔn)工作,精確地確定各設(shè)備之間的位置差異和軸向定位偏差。然而,機(jī)載 LIDAR系統(tǒng)是近幾年出現(xiàn)的新設(shè)備,缺乏統(tǒng)一的校準(zhǔn)標(biāo)準(zhǔn)和規(guī)范,如何有效地校準(zhǔn)上述系統(tǒng)性偏差是最大限度地開發(fā)機(jī)載 LIDAR系統(tǒng)效率和精度的關(guān)鍵。本文基于天津、煙臺和舟山3個標(biāo)準(zhǔn)校準(zhǔn)場的飛行試驗(yàn)數(shù)據(jù),對于機(jī)載LIDAR系統(tǒng)的校準(zhǔn)方案優(yōu)化設(shè)計進(jìn)行了有益的嘗試。綜合分析了激光掃描器安裝角度誤差的校準(zhǔn)方法和優(yōu)化方案,也比較了不同基站布設(shè)距離、不同校準(zhǔn)場地、不同飛行高度、不同航速、不同掃描頻率和視場角等因素對校準(zhǔn)結(jié)果的影響。試驗(yàn)結(jié)果顯示:(1)對于Roll、Pitch和Heading的校準(zhǔn)需要采用迭代方式,并采用Roll→Pitch→Heading這樣的順序效率最高;(2)基站的布設(shè)應(yīng)盡量靠近校準(zhǔn)場,采用全站儀測量GPS天線中心和激光掃描儀的中心偏差精度最高;(3)校準(zhǔn)場平坦為宜,并有較大的尖頂房屋和筆直寬闊的馬路;(4)根據(jù)不同的參數(shù)校準(zhǔn)需求,選擇不同的飛行高度,航速越慢、掃描頻率越高、視場角越小,越有利于提高校準(zhǔn)精度。
[1]JAYD, SATALELM, HAYM, et al.LiDAR in mapping [J / OL].Http: / / www.Gisdevelopment .net/ technology/ gis/.
[2]RUIZ A , GOZALEZ X ,HERMS I, et al.Flood risk mapping based on airborne laser scanner data: Case of The Llobregat River [J / OL].http :/ / www.icc.es/ pdf/ bienni0102/ II_fotogramet ria/ flood_risk.pdf.
[3]HOLLAUS M, WAGNER W, KRAUS K.Airborne laser scanning and usefulness for hydrological models [J].Advances in Geosciences.2005, 5:57-63.
[4]DALAN S, FORSBERG R, KELLER K, et al.Airborne LiDAR measurement s of sea ice north of Greenland and Ellesmere Island 2004 [R].Danish National Space Center Technical Report No.1, 2005.
[5]史照良,曹敏.基于 LiDAR技術(shù)的海島礁、灘涂測繪研究 [J].測繪通報,2007(5):49-53.
[6]BC-CARMS.LiDAR-overview of technology, applications, market features & industry [R].Victoria: Centre for Applied Remote Sensing, Modeling and Simulation, University of Victoria.
[7]李樹楷, 薛永祺.高效三維遙感集成技術(shù)系統(tǒng) [M].北京: 科學(xué)出版社, 2000.
[8]Ackermann F.Airborne Laser Scanning- Present Status and Future Expectations [J].ISPRS, 1999, 54 (2/3): 64-67.
[9]劉基余, 李松.機(jī)載激光測深系統(tǒng)測深誤差源的研究 [J].武漢測繪科技大學(xué)學(xué)報, 2000, 25 (6) : 491-495.
[10]Toni S.Modeling and Recovering Systematic Errors in Airborne Laser Scanners [C].OEEPE Workshop on Airborne Laser Scanning and Interferometric SAR for Detailed Digital Elevation Models, Sweden, 2001.
Optimized design for airborne LIDAR calibration test
ZHANG Han-de1, LIU Yan-xiong2, BIE Jun1,SHAN Rui2,3, HUANG Yong Jun4, ZHANG Jian2
(1.North Sea Branch, SOA, Qingdao 266033, China; 2.The First Institute of Oceanography, SOA, Qingdao 266061, China; 3.Qingdao Institute of Marine Geology, Qingdao 266071, China; 4.Hydro Graphic Surveys Brigade TJ MSA, Tianjin 300222, China)
P237
A
1001-6932(2011)01-0007-05
2010-01-18;收修改稿日期:2010-09-10
海洋公益性行業(yè)科研專項經(jīng)費(fèi)項目(200705003);863項目(2009AA12Z127)
張漢德(1962-),男,碩士,研究員,主要從事遙感信息應(yīng)用研究,電子郵箱:99hande@sina.com。
劉焱雄,博士,研究員,電子郵箱:yxliu@fio.org.cn。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
