密集模態(tài)撓性結(jié)構(gòu)振動(dòng)的自適應(yīng)逆控制
2011-09-17 09:08:28姚太克
振動(dòng)與沖擊 2011年10期
王 永, 姚太克, 陳 光,2
(1.中國(guó)科學(xué)技術(shù)大學(xué) 自動(dòng)化系,合肥 230027;2.北京航天時(shí)代激光導(dǎo)航技術(shù)有限責(zé)任公司,北京 100143)
空間大型撓性結(jié)構(gòu)的振動(dòng)控制問題是航天控制領(lǐng)域挑戰(zhàn)性課題之一,一般大型撓性航天器具有阻尼小、模態(tài)密集等特點(diǎn)[1-3],所處的外太空環(huán)境幾乎無空氣阻尼,各種內(nèi)部和外部的干擾很容易激起長(zhǎng)時(shí)間的低頻振動(dòng),會(huì)造成撓性結(jié)構(gòu)的疲勞破壞,也會(huì)影響姿態(tài)控制系統(tǒng)、定位系統(tǒng)等的正常工作,需要對(duì)振動(dòng)進(jìn)行控制。目前,密集模態(tài)撓性結(jié)構(gòu)振動(dòng)控制的研究還不是很充分,控制器設(shè)計(jì)大都沿用傳統(tǒng)振動(dòng)主動(dòng)控制中的方案。模態(tài)控制和最優(yōu)控制是常用的控制策略,已經(jīng)在許多撓性結(jié)構(gòu)振動(dòng)控制系統(tǒng)中得到驗(yàn)證[4,5],能很好地解決密集模態(tài)撓性結(jié)構(gòu)在相當(dāng)長(zhǎng)一段時(shí)間內(nèi)不發(fā)生變化且其模型可以較準(zhǔn)確獲取的一類問題。但是,空間工作環(huán)境無法精確建模和模擬且復(fù)雜多變,如航天器經(jīng)過太陽的陽面和陰面、不同位置受到不同角度的太陽照射等都可能導(dǎo)致其結(jié)構(gòu)參數(shù)發(fā)生較大的變化,在地面上事先設(shè)計(jì)好的最優(yōu)控制器或其他固定參數(shù)控制器也許會(huì)失靈,甚至可能引起控制系統(tǒng)的失穩(wěn),因此,在線自適應(yīng)控制的研究勢(shì)在必行[1,6],包括模型參考自適應(yīng)控制、自校正控制、變結(jié)構(gòu)控制及基于自適應(yīng)濾波的自適應(yīng)逆控制等。
自適應(yīng)逆控制(Adaptive inverse control)是美國(guó)斯坦福大學(xué)教授Widrow提出的[7],其基本思想是利用被控對(duì)象傳遞函數(shù)(矩陣)的逆作為串聯(lián)控制器對(duì)系統(tǒng)的動(dòng)態(tài)特性作開環(huán)控制,具有形式簡(jiǎn)單,易于實(shí)現(xiàn),穩(wěn)定性好等特點(diǎn),已經(jīng)在許多領(lǐng)域得到廣泛的應(yīng)用,如Rouse等[8]將自適應(yīng)逆控制應(yīng)用于加速器電子束的擾動(dòng)消除系統(tǒng)之中,李嘉全[9]將其應(yīng)用于浮筏系統(tǒng)的振動(dòng)主動(dòng)控制中,取得了良好的減振效果,但在密集模態(tài)撓性結(jié)構(gòu)振動(dòng)控制中的應(yīng)用,還未見到文獻(xiàn)報(bào)道。
本文針對(duì)空間大型撓性結(jié)構(gòu)具有模態(tài)密集和參數(shù)易變的特點(diǎn),采用多變量自適應(yīng)逆控制策略進(jìn)行擾動(dòng)抑制實(shí)驗(yàn)研究。在已構(gòu)造的二維密集模態(tài)撓性板實(shí)驗(yàn)系統(tǒng)上,進(jìn)行自適應(yīng)建模和自適應(yīng)逆建模的研究,最后進(jìn)行擾動(dòng)控制和變參數(shù)擾動(dòng)控制的實(shí)驗(yàn)研究。
1 自適應(yīng)逆控制基本原理
自適應(yīng)逆控制是利用被控對(duì)象傳遞函數(shù)(矩陣)的逆作為串聯(lián)控制器對(duì)系統(tǒng)的動(dòng)態(tài)特性作開環(huán)控制,根據(jù)反饋誤差信號(hào)和自適應(yīng)算法調(diào)整控制器參數(shù),使得控制器和對(duì)象的級(jí)聯(lián)在收斂后具有參考模型類似的動(dòng)態(tài)響應(yīng),其控制結(jié)構(gòu)如圖1所示。同時(shí),自適應(yīng)逆控制將系統(tǒng)動(dòng)態(tài)特性的控制與對(duì)象擾動(dòng)的控制分開處理而互不影響。對(duì)象擾動(dòng)的消除如圖1虛線框所示,對(duì)象輸入同時(shí)激勵(lì)對(duì)象和對(duì)象模型(沒有噪聲和擾動(dòng)),對(duì)象輸出與對(duì)象模型輸出之差就是對(duì)象的噪聲和擾動(dòng)。用該噪聲和擾動(dòng)作為逆對(duì)象模型的輸入,濾波后的輸出反饋到對(duì)象輸入中,即可消除噪聲和擾動(dòng)。
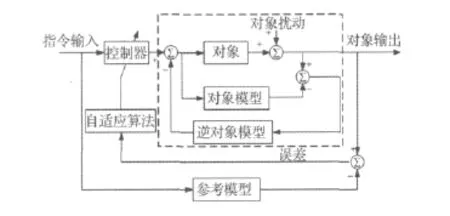
圖1 具有擾動(dòng)消除的模型參考自適應(yīng)逆控制系統(tǒng)Fig.1 Model-reference adaptive inverse control system
自適應(yīng)逆控制主要由兩部分組成:對(duì)象自適應(yīng)建模與自適應(yīng)逆建模,分別建立對(duì)象模型和控制器。線性系統(tǒng)自適應(yīng)逆控制的對(duì)象模型和控制器一般均采用有限脈沖響應(yīng)濾波器形式[10,11],自適應(yīng)算法采用最小均方算法(LMS)或其改進(jìn)形式。
2 密集模態(tài)撓性板振動(dòng)控制實(shí)驗(yàn)系統(tǒng)
本文針對(duì)已建立的二維H型密集模態(tài)撓性板振動(dòng)控制物理實(shí)驗(yàn)系統(tǒng)[12],研究密集模態(tài)撓性結(jié)構(gòu)振動(dòng)的自適應(yīng)逆控制。圖2給出了H型密集模態(tài)撓性板的示意圖。

表1 H型撓性板的相關(guān)參數(shù)Tab.1 Parameters of H-like flexible plate
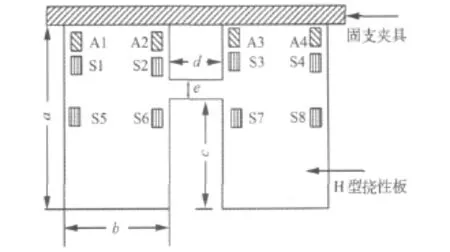
圖2 H型撓性板實(shí)際的傳感器和作動(dòng)器配置示意圖Fig.2 Configurations of sensors and actuators of H-like close model flexible plate
圖中A1~A4是作動(dòng)器,S1~S8為傳感器,其中S5~S8僅作觀測(cè)使用,不參與系統(tǒng)閉環(huán)控制,傳感器、作動(dòng)器均為壓電陶瓷。撓性板和壓電陶瓷尺寸、材料參數(shù)見表1和表2。
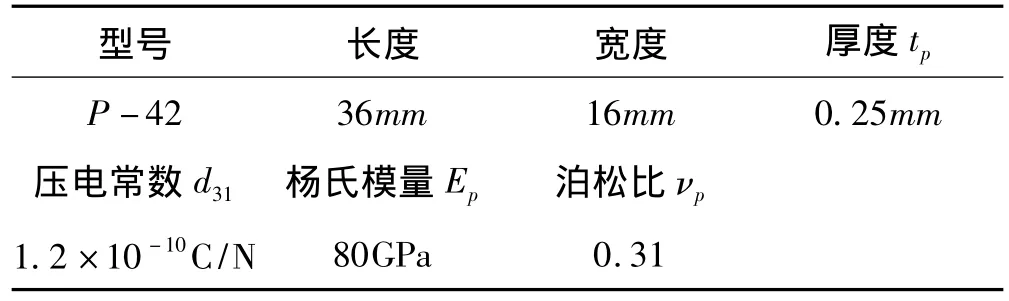
表2 壓電陶瓷的相關(guān)參數(shù)Tab.2 Parameters of piezoelectric ceramics
根據(jù)有限元分析和正弦掃描結(jié)果,二維H型密集模態(tài)撓性板系統(tǒng)前12階固有頻率如表3所示。可以看出,1、2、3、4階模態(tài)為密集模態(tài),它們都具有較小的阻尼。進(jìn)一步的實(shí)驗(yàn)可以得知,5階以上模態(tài)相對(duì)而言,模態(tài)阻尼較大,并且第5階模態(tài)頻率較第4階大將近一倍,相對(duì)而言更難被激發(fā)出來,為降低系統(tǒng)復(fù)雜度,在此我們僅考慮前4階模態(tài)的振動(dòng)情況。

表3 H型撓性板的前12階固有頻率Tab.3 The first 12 models of H-like flexible plate
3 密集模態(tài)撓性板的自適應(yīng)建模和自適應(yīng)逆建模研究
在密集模態(tài)撓性結(jié)構(gòu)的振動(dòng)控制中,目標(biāo)是使系統(tǒng)的振動(dòng)輸出為零,故圖1中的指令輸入為零,從而實(shí)際自適應(yīng)逆控制結(jié)構(gòu)只需擾動(dòng)抑制部分,如圖3所示,圖中(z)是自適應(yīng)擾動(dòng)消除器。

圖3 密集模態(tài)撓性結(jié)構(gòu)的自適應(yīng)擾動(dòng)消除控制結(jié)構(gòu)Fig.3 Controller structure of adaptive disturbance-canceller of close model flexible plate
下面將根據(jù)自適應(yīng)逆控制的一般步驟,建立密集模態(tài)撓性板的自適應(yīng)模型及其逆模型。
3.1 自適應(yīng)建模
采樣對(duì)象輸入輸出數(shù)據(jù),自動(dòng)調(diào)節(jié)自適應(yīng)模型參數(shù)以產(chǎn)生一個(gè)輸出,當(dāng)對(duì)象輸出與模型輸出非常接近的時(shí)候,則可認(rèn)為該自適應(yīng)脈沖響應(yīng)就是對(duì)象脈沖響應(yīng)的一個(gè)好的表示。但是在任意迭代時(shí)刻k,自適應(yīng)模型和對(duì)象P之間總會(huì)有差別,該差別稱為失配。為了克服因輸入信號(hào)不充分引起的模型失配,常在輸入信號(hào)中附加隨機(jī)抖動(dòng)信號(hào),使對(duì)象輸入在所關(guān)心的頻段內(nèi)具有均勻譜密度。
H型密集模態(tài)撓性板實(shí)驗(yàn)系統(tǒng)是一個(gè)4輸入4輸出的MIMO系統(tǒng),其建模結(jié)構(gòu)如圖4。建模信號(hào)是4路不相關(guān)的白噪聲,采樣頻率為40 Hz,脈沖響應(yīng)長(zhǎng)度均取800,自適應(yīng)算法是文獻(xiàn)[6] 提出的基于相關(guān)誤差的變步長(zhǎng)LMS,該算法具有較快的收斂速度和較好的收斂精度。
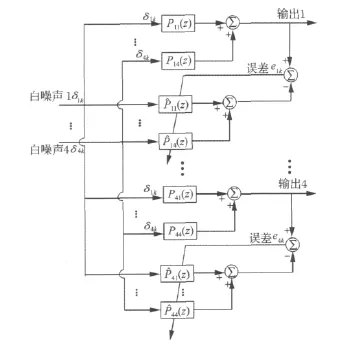
圖4 MIMO系統(tǒng)自適應(yīng)建模結(jié)構(gòu)圖Fig.4 Structure of MIMO adaptive modeling

其中,Mij為第i路輸出j路輸入通道模型的脈沖響應(yīng)長(zhǎng)度,本文均取800。
3.2 自適應(yīng)逆建模
對(duì)于圖3所示的擾動(dòng)消除問題,自適應(yīng)逆建模就是獲取擾動(dòng)消除器(z)的過程。由于MIMO系統(tǒng)運(yùn)算的不可交換性,需采用 Filtered-error LMS方法[7,13],其實(shí)現(xiàn)過程如圖5所示。先求得對(duì)象模型的一個(gè)延時(shí)逆,然后利用對(duì)對(duì)象輸出進(jìn)行濾波,從而得到消除器自適應(yīng)過程所需要的誤差,只不過該誤差延時(shí)了Δ步,于是在自適應(yīng)過程中對(duì)(z)的輸入也要延時(shí)相同的步數(shù),延時(shí)步數(shù)一般為自適應(yīng)濾波器長(zhǎng)度的一半。

圖5 MIMO系統(tǒng)擾動(dòng)抑制控制器的實(shí)現(xiàn)Fig.5 Realization of MIMO disturbance-canceller
4 密集模態(tài)撓性板的振動(dòng)控制實(shí)驗(yàn)
4.1 擾動(dòng)抑制
擾動(dòng)激振信號(hào)采用0~10 Hz的多正弦信號(hào),激振頻率與控制頻率相同取40 Hz,擾動(dòng)激振信號(hào)重復(fù)輸入3遍,僅在第2遍時(shí)施加控制,圖6給出了實(shí)際的控制效果,虛線框內(nèi)代表施加控制后的系統(tǒng)響應(yīng)。可以看出,沒有控制之前,系統(tǒng)輸出較大,響應(yīng)中較大的尖峰值說明系統(tǒng)處于共振狀態(tài)。施加控制之后,系統(tǒng)輸出明顯減小,尖峰值也被大大降低。

圖6 擾動(dòng)的自適應(yīng)逆控制Fig.6 Results of adaptive inverse disturbance control
為了便于比較,下面采用文獻(xiàn)[5] 中提出的基于頻域辨識(shí)模型設(shè)計(jì)的固定參數(shù)控制器對(duì)系統(tǒng)進(jìn)行控制。擾動(dòng)激振信號(hào)仍然采用0~10 Hz的多正弦信號(hào),激振和控制頻率相同取100 Hz,擾動(dòng)激振重復(fù)三遍,僅在第2遍時(shí)施加控制,圖7給出了控制效果。虛線框內(nèi)表示控制后的輸出,可以看出,控制之后,系統(tǒng)輸出也被抑制在一個(gè)較低的水平。

圖7 固定參數(shù)控制器的擾動(dòng)消除Fig.7 Results of fixed-parameter disturbance control
為了更直觀的觀察自適應(yīng)逆控制的控制效果,以控制前后系統(tǒng)輸出均方之比作為評(píng)價(jià)標(biāo)準(zhǔn)進(jìn)行定量分析。表4給出了兩種方法的控制效果,從表中可以看出,自適應(yīng)逆控制的效果要好一些。

表4 持續(xù)擾動(dòng)控制前后系統(tǒng)輸出均方之比Tab.4The ratios of output mean square with and without control
4.2 對(duì)象參數(shù)變化時(shí)的自適應(yīng)逆控制
自適應(yīng)逆控制更大的優(yōu)勢(shì)在于其自適應(yīng)性。下面考慮對(duì)象參數(shù)變化時(shí),控制器的在線更新問題。采用一段時(shí)間內(nèi)輸出均方和作為控制效果的評(píng)價(jià)指標(biāo),當(dāng)連續(xù)幾個(gè)時(shí)間段內(nèi)輸出均方和均無減小的趨勢(shì),則認(rèn)為系統(tǒng)參數(shù)發(fā)生了顯著變化,此時(shí),切斷控制器,重新在線建立對(duì)象的模型和逆模型,進(jìn)而實(shí)現(xiàn)自適應(yīng)逆控制。
在本文所建的密集模態(tài)撓性結(jié)構(gòu)對(duì)象上,粘貼一塊薄板以及兩個(gè)銅塊,如圖8所示,使對(duì)象參數(shù)發(fā)生變化。
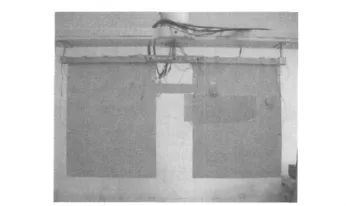
圖8 參數(shù)發(fā)生變化的撓性板Fig.8 Flexible plate with changed parameters
此時(shí)仍采用原來的控制器進(jìn)行控制發(fā)現(xiàn),系統(tǒng)輸出會(huì)逐漸增大,如圖9所示,前面為未加控制的系統(tǒng)輸出,后面顏色較深部分為采用原來控制器的控制效果。
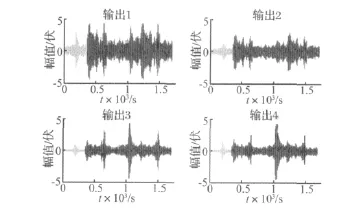
圖9 采用原控制器系統(tǒng)輸出Fig.9 Results of output with the former controller
切斷原來的控制器,開始新一輪的在線辨識(shí),過程和上面相同。自適應(yīng)過程收斂后,會(huì)自動(dòng)再將所得控制器切換到閉環(huán),針對(duì)持續(xù)擾動(dòng)得到了如圖10所示的控制效果,其中前面為未加控制的系統(tǒng)輸出,后面為自適應(yīng)逆控制后的效果。可以看出,自適應(yīng)逆控制可以跟隨系統(tǒng)參數(shù)的變化,達(dá)到很好的控制效果,這是固定參數(shù)控制器不能做到的。

圖10 自適應(yīng)逆控制器收斂時(shí)擾動(dòng)抑制效果Fig.10 Results of output with adaptive inverse controller
5 結(jié)論
本文針對(duì)已建立的H型二維密集模態(tài)撓性板,進(jìn)行自適應(yīng)建模和自適應(yīng)逆建模研究,并實(shí)現(xiàn)了對(duì)擾動(dòng)的有效抑制,與固定參數(shù)控制器的控制效果進(jìn)行比較,結(jié)果表明自適應(yīng)逆控制對(duì)密集模態(tài)撓性結(jié)構(gòu)振動(dòng)抑制的有效性;改變撓性板結(jié)構(gòu)參數(shù),控制系統(tǒng)重新進(jìn)行在線辨識(shí)和控制器參數(shù)自適應(yīng)調(diào)整,實(shí)現(xiàn)新狀態(tài)下振動(dòng)的有效控制,驗(yàn)證了自適應(yīng)逆控制對(duì)密集模態(tài)撓性結(jié)構(gòu)振動(dòng)的控制具有強(qiáng)大的自適應(yīng)優(yōu)勢(shì)。
[1] 沈佐寧.撓性結(jié)構(gòu)的智能控制方法研究[D] .南京:南京理工大學(xué),2009.
[2] 張國(guó)琪,丁建釗,吳宏鑫.基于特征模型的柔性機(jī)械臂自適應(yīng)補(bǔ)償控制[J] .中南大學(xué)學(xué)報(bào),2007,35(l):547-552.
[3] 邱志成.航天器撓性板系統(tǒng)的模態(tài)分析和模型降階[J] .航天控制,2006,24(3):89-96.
[4] 魏燕定,陳定中,程耀東.壓電懸臂梁振動(dòng)的模態(tài)控制[J] .浙江大學(xué)學(xué)報(bào)(工學(xué)版),2004,38(9):1180-1184.
[5] 陳 光,王 永.密集模態(tài)撓性結(jié)構(gòu)模型多變量頻域辨識(shí)和控制[J] .實(shí)驗(yàn)力學(xué),2008,23(2):47-54.
[6] 陳 光.密集模態(tài)撓性結(jié)構(gòu)的多變量實(shí)驗(yàn)辨識(shí)及自適應(yīng)逆控制[D] .合肥:中國(guó)科學(xué)技術(shù)大學(xué),2006.
[7] Widrow B,Walach E,著,劉樹棠,韓崇昭,譯.自適應(yīng)逆控制[M] .西安:西安交通大學(xué)出版社,2000.
[8] Rouse F,Castillo S,Allison S,et al.Database driven fast feedback system for the Stanford linear collider[J] .Physics Research,1991,316(2):343-350.
[9] 李嘉全.浮筏系統(tǒng)的振動(dòng)主動(dòng)控制研究[D] .合肥:中國(guó)科學(xué)技術(shù)大學(xué),2008.
[10] Widrow B,Stearns S D.Adaptive signal processing[M] .Prentice - Hall,1985.
[11] Haykin S.Adaptive filter theory[M] .Publishing House of Electronics Industry,2003.
[12] 陳 光,王 永,萬 璞.密集模態(tài)撓性結(jié)構(gòu)傳感器/作動(dòng)器的優(yōu)化配置[J] .實(shí)驗(yàn)力學(xué),2006,21(3):1-7.
[13] 張端金,劉 俠.X-濾波和ε-濾波LMS算法性能分析[J] .鄭州大學(xué)學(xué)報(bào)(理學(xué)版),2004,36(1):49-52.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44
