尾流自導(dǎo)魚雷最小開機距離及其應(yīng)用
2011-09-02 06:23:58野學(xué)范李本昌張孝芳孫曉磊
指揮控制與仿真 2011年5期
野學(xué)范,李本昌,張孝芳,孫曉磊
(海軍潛艇學(xué)院,山東 青島 266042)
自導(dǎo)魚雷在攻擊過程中準(zhǔn)確地選擇末段自導(dǎo)開機距離(時機)是影響攻擊效果的重要環(huán)節(jié)。這是因為如果魚雷自導(dǎo)開機過早,有可能產(chǎn)生不利于平臺對目標(biāo)繼續(xù)探測和魚雷導(dǎo)引的狀況[1-2],或者由于魚雷的變深行為導(dǎo)致過早被暴露的可能,由此,不僅會給目標(biāo)提供較為充裕的對抗時間,還可能遭到目標(biāo)對發(fā)射臺的反擊;如果開機過晚,則又可能影響魚雷對目標(biāo)的正常搜索,甚至失去魚雷搜索發(fā)現(xiàn)目標(biāo)的機會。所以,恰當(dāng)?shù)卮_定魚雷自導(dǎo)開機距離是作戰(zhàn)使用中一個不容忽視的問題。
末段聲自導(dǎo)魚雷攻擊如此,末段尾流自導(dǎo)魚雷攻擊也是如此。由于魚雷自身技術(shù)的要求,以及作戰(zhàn)使用過程中諸多不確定因素的影響,要想恰到好處地選擇魚雷自導(dǎo)開機時機,首先必須依據(jù)魚雷的技術(shù)要求、作戰(zhàn)使用的可能情況確定魚雷所需要的最小開機距離。以此為目的,本文試圖研究末段尾流自導(dǎo)魚雷的最小開機距離及其應(yīng)用問題。
1 尾流自導(dǎo)最小開機距離概念
由于魚雷技術(shù)和作戰(zhàn)使用的需要,尾流自導(dǎo)魚雷開機后通常需要完成下列動作:變深,以從導(dǎo)引時的深度或預(yù)設(shè)定的深度上浮到滿足魚雷自導(dǎo)檢測的深度上;變速,以使用規(guī)定的速度檢測和跟蹤目標(biāo);自導(dǎo)自適應(yīng),以建立尾流自導(dǎo)的檢測基準(zhǔn)等,而完成這些任務(wù)都需要一定的時間過程。所以,從本質(zhì)上來說,確定魚雷自導(dǎo)開機距離的主要依據(jù)是魚雷自導(dǎo)開機點與預(yù)定的射擊瞄準(zhǔn)點[3-4](目標(biāo)尾流中的一點)之間的距離。如果魚雷正常完成這一系列工作之后正好進入目標(biāo)尾流,那么魚雷自導(dǎo)開機點與魚雷進入目標(biāo)尾流點之間的距離就稱為尾流自導(dǎo)的最小開機距離。
顯而易見,在作戰(zhàn)應(yīng)用中,無論采用尾流自導(dǎo)射擊,還是采用線導(dǎo)加尾流自導(dǎo)射擊,最小開機距離都是確定魚雷自導(dǎo)開機最晚時機的重要依據(jù)。也就是說,只有在魚雷與射擊瞄準(zhǔn)點之間的距離大于最小開機距離時控制魚雷自導(dǎo)開機才是有效的,否則攻擊失敗是不可避免的。因此,研究這一最小距離是研究尾流自導(dǎo)魚雷自導(dǎo)開機時機的前提條件和重要依據(jù)。
2 影響尾流自導(dǎo)最小開機距離的主要因素
由于在攻擊應(yīng)用中,很多不確定性因素的存在,必將使得魚雷最小開機距離與這些因素密切相關(guān)。例如,不同的發(fā)射(導(dǎo)引)深度,會使魚雷上浮過程需要的時間不同,從而影響完成自導(dǎo)開機過程的時間。因此,魚雷自導(dǎo)的最小開機距離實際上是關(guān)于各種相關(guān)因素的函數(shù),而并不是通過簡單的定性分析就能確定的參數(shù)。其中,主要的影響因素在于以下幾個方面。
2.1 魚雷航行深度的影響
魚雷航行深度與最小開機距離之間存在著一定的關(guān)系。原因在于:魚雷在自適應(yīng)前有一個爬升變深的過程。因此,從不同深度爬升到自導(dǎo)開機后的戰(zhàn)斗深度所需要的時間是不同的。同時,魚雷在以一定的俯仰角爬升的過程中,在水平方向上必然存在著速度的分量。因此,發(fā)射深度越大,由速度水平分量產(chǎn)生的水平移動距離亦隨之增大。
2.2 魚雷航向誤差的影響
魚雷航向誤差是指在水平面上向左或向右偏離平均航跡的角度[5]。魚雷航程與航向誤差余弦的乘積和最小開機距離之間存在正比例關(guān)系,這種誤差將影響魚雷進入目標(biāo)尾流的距離。
2.3 魚雷速制及其誤差的影響
1)魚雷速制。魚雷速制的不同造成的影響主要表現(xiàn)在兩方面:一是魚雷上浮過程所需時間不同;二而是魚雷自導(dǎo)自適應(yīng)過程所消耗航程不同。
2)魚雷速度誤差。在確保魚雷完成自導(dǎo)開機過程的前提下,魚雷航速誤差是確定自導(dǎo)開機最小距離應(yīng)顧及的重要因素,通常應(yīng)以正向誤差為基準(zhǔn)。
2.4 目標(biāo)散布的影響
目標(biāo)散布是由潛艇測量目標(biāo)運動要素誤差引起的,目標(biāo)散布區(qū)的大小與海上目標(biāo)的定位誤差、戰(zhàn)術(shù)態(tài)勢、射擊區(qū)的地理位置及水文氣象條件、目標(biāo)信息的延時時間等因素有關(guān)。
在潛艇攻擊中,目標(biāo)方位(航向)、距離誤差對魚雷直航段航程影響較大,自然也就對最小開機距離產(chǎn)生較大影響;而目標(biāo)航速誤差影響只表現(xiàn)在魚雷尾流進入點相對目標(biāo)艦尾的偏移量,且該偏移量不會使進入點超出目標(biāo)尾流有效范圍,因此魚雷尾流進入點的偏移問題可以忽略,航速誤差產(chǎn)生的影響可以不計。[6]
3 尾流自導(dǎo)最小開機距離數(shù)學(xué)模型
3.1 計算模型
依據(jù)上述各種因素及其表現(xiàn)形態(tài),可建立尾流自導(dǎo)最小開機距離的數(shù)學(xué)模型如下:

圖1 尾流自導(dǎo)魚雷射擊示意圖
如圖1所示,Dmin為尾流自導(dǎo)最小開機距離,d1為魚雷完成變深時航行航程,d2為魚雷完成自適應(yīng)航行主航程,d3為魚雷完成變高速時航行航程,dΔ4為開機點散布誤差,dΔ5為目標(biāo)運動要素誤差引起的魚雷直航段航程誤差,vΔ1為開機前速度誤差,v1為低速,a為魚雷從低速轉(zhuǎn)至高速的加速度,v2為高速,hΔ為魚雷深度誤差,H為魚雷巡航深度,h為預(yù)設(shè)定的戰(zhàn)斗深度,t0為魚雷開機前的航行時間,t1為魚雷完成變深所需時間,t2為魚雷自適應(yīng)時間,t3為魚雷完成變高速所需時間(t2、t3設(shè)為20′),α為魚雷變深時俯仰角(設(shè)為 30°),β為魚雷自適應(yīng)蛇行機動時與主航向夾角(設(shè)為 45°),x為魚雷方位失準(zhǔn)角。ΔSlΔDg、ΔSlΔXm分別為目標(biāo)距離誤差、航向誤差引起的魚雷直航段航程誤差,由于數(shù)學(xué)描述很長,且文獻[6]中已有詳細描述,在此不再展開。
3.2 仿真計算和分析
采用目標(biāo)速度20Kn,魚雷速度30 Kn,設(shè)定魚雷航向誤差為5度,利用上述數(shù)學(xué)模型分別仿真計算魚雷設(shè)定深度5m、25m時自導(dǎo)最小開機距離。
表1 魚雷航向誤差5度設(shè)定深度5m/25m時自導(dǎo)最小開機距離(m)
結(jié)果表明,正橫附近,魚雷航向正向誤差影響自導(dǎo)開機距離較小,因此自導(dǎo)最小開機距離較小;隨著攻擊目標(biāo)舷角的增大或減小,魚雷航向誤差引起的正向誤差均呈增大趨勢,目標(biāo)距離越遠魚雷航向引起的正向誤差也越大,此時自導(dǎo)最小開機距離自然越大;魚雷設(shè)定深度雖也對其產(chǎn)生影響,但影響較小。
采用目標(biāo)速度20 Kn,魚雷速度30 Kn,魚雷航程誤差3%,分別仿真計算魚雷設(shè)定深度5m、25m時自導(dǎo)最小開機距離,結(jié)果如下:
表2 魚雷航程誤差3%設(shè)定深度5m/25m魚雷自導(dǎo)最小開機距離(m)
結(jié)果表明,距離越遠,目標(biāo)舷角越大,魚雷航程正向誤差影響自導(dǎo)開機距離越大,因此自導(dǎo)最小開機距離越大;設(shè)定深度影響同上。
采用目標(biāo)速度20m/30m,目標(biāo)距離誤差10%、航向誤差5度,魚雷速度30 Kn、設(shè)定深度25m、航向誤差2度、航程誤差3%,仿真計算結(jié)果如表3。
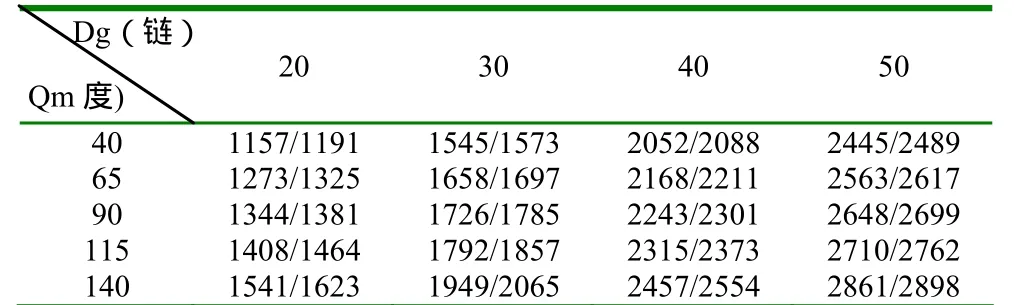
表3 目標(biāo)速度20 Kn /30 Kn綜合要素誤差影響下的最小開機距離(米)
結(jié)果表明,綜合要素誤差對魚雷自導(dǎo)最小開機距離的影響是:目標(biāo)距離越遠、攻擊目標(biāo)舷角越大,魚雷自導(dǎo)開機距離受綜合要素誤差正向影響越大,因此魚雷自導(dǎo)最小開機距離越大。
綜合比較三個表中的數(shù)據(jù)不難看出:目標(biāo)距離誤差、航向誤差的影響是主要的,魚雷航向誤差、航程誤差以及設(shè)定深度的影響是次要的。
采用目標(biāo)速度10-35 Kn,進行重復(fù)仿真計算和統(tǒng)計分析,綜合要素誤差對自導(dǎo)最小開機距離的影響與表3呈相同的變化規(guī)律;且目標(biāo)速度越大綜合要素誤差對自導(dǎo)最小開機距離影響越大。在魚雷自導(dǎo)開機任務(wù)充分完成的基礎(chǔ)上,必須考慮各種隨機誤差的干擾,以保證魚雷完成自導(dǎo)自適應(yīng)之前不出現(xiàn)穿越目標(biāo)尾流的可能。
4 魚雷自導(dǎo)最小開機距離的應(yīng)用
研究尾流自導(dǎo)魚雷最小開機距離的根本目的在于如何根據(jù)魚雷技術(shù)的需要把握作戰(zhàn)使用方法,而作戰(zhàn)使用過程中所關(guān)心的是魚雷自導(dǎo)開機時機問題。在利用開機距離或者開機時間的前提下,為了科學(xué)合理地計算這一時機,在以自導(dǎo)方式射擊時,當(dāng)確定了發(fā)射態(tài)勢和目標(biāo)運動要素之后,應(yīng)首先按照上述模型計算魚雷的最小開機距離,然后依據(jù)發(fā)射方式和射擊參數(shù)的解算結(jié)果計算魚雷的自導(dǎo)開機距離。
4.1 自導(dǎo)魚雷射擊的魚雷航程
在計算魚雷最小開機距離的基礎(chǔ)上,確定魚雷自導(dǎo)開機時機可以用魚雷出管后的航程確定,也可以用魚雷出管后的時間確定。無論使用哪一種,都必須計算魚雷從發(fā)射到進入預(yù)定瞄準(zhǔn)點過程中魚雷所經(jīng)歷的航程 St。為此,還需按照武器系統(tǒng)的射擊控制方法計算魚雷的這一航程。
依據(jù)發(fā)射態(tài)勢和魚雷技術(shù)要求,末端尾流自導(dǎo)魚雷射擊模式通常分為一次轉(zhuǎn)角射擊和二次轉(zhuǎn)角射擊兩種。當(dāng)潛艇在當(dāng)前的位置點通過魚雷一次轉(zhuǎn)角能夠滿足魚雷的進入角度要求時,采用一次轉(zhuǎn)角射擊。否則,如果魚雷一次轉(zhuǎn)角不能保證魚雷以理想的角度進入尾流時,則需要進行第二次轉(zhuǎn)角射擊。因此,計算魚雷的航程有以下兩種情況。
1)一次轉(zhuǎn)角射擊時
如圖2所示,利用轉(zhuǎn)角射擊方程式[7]可求得:

2)二次轉(zhuǎn)角射擊時
如圖3所示,利用轉(zhuǎn)角射擊方程式[7]可求得:


圖2 一次轉(zhuǎn)角射擊
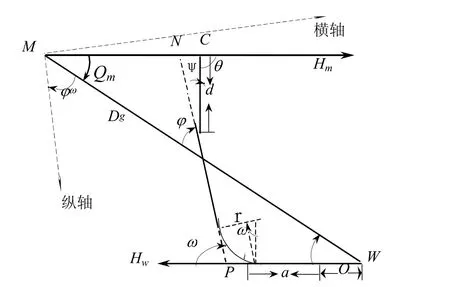
圖3 二次轉(zhuǎn)角射擊
4.2 極限開機時機及應(yīng)把握的問題
利用最小開機距離和魚雷進入預(yù)定瞄準(zhǔn)點的航程很容易確定魚雷的極限開機時機,用魚雷航程可表示為

或者,可用魚雷航行時間表示為

上式考慮的是魚雷不變速時的情形,變速時則應(yīng)根據(jù)變速時機分段計算,由于魚雷變速時機不盡相同,在此不詳細展開分析。
可以看出,以上兩式描述的是魚雷的極限開機時機,即魚雷按此時機開機,正好完成開機后即進入目標(biāo)尾流;若魚雷在這一時機仍未開機,將直接導(dǎo)致魚雷穿越尾流、丟失目標(biāo);若過早于這一時機又將影響隱蔽性的戰(zhàn)術(shù)要求。因此,在作戰(zhàn)運用中,應(yīng)依據(jù)各種誤差的干擾程度確定開機時機。一般情況下,確定的開機時機應(yīng)早于這一時機。
5 結(jié)束語
最小開機距離的概念及其算法揭示了尾流自導(dǎo)魚雷射擊控制的技術(shù)要求,給出了確定尾流自導(dǎo)魚雷自導(dǎo)開機時機的依據(jù)。然而,由于其計算的復(fù)雜性,在應(yīng)用中僅靠作戰(zhàn)使用者的人工計算和估計,將難以滿足高度緊張過程中的應(yīng)用問題,其必然的要求就是象解算魚雷的其它射擊控制參數(shù)一樣,利用作戰(zhàn)系統(tǒng)的技術(shù)資源提供實時解算保障。由此,對提高尾流自導(dǎo)魚雷的作戰(zhàn)效能將是十分有益的。
[1]艾東.線導(dǎo)+尾流自導(dǎo)魚雷導(dǎo)引方法應(yīng)用探討[J].指揮控制與仿真,2010,32(4):47-48.
[2]李剛強,黃文斌.線導(dǎo)魚雷導(dǎo)引方法綜述明[J].魚雷技術(shù),2003,l1(2):38-42.
[3]李本昌.尾流自導(dǎo)魚雷射擊瞄點及射擊解算[J].潛艇學(xué)術(shù)研究,2000,79(2):33-34.
[4]夏佩倫.一種計算尾流自導(dǎo)魚雷極限射距的方法[J].魚雷技術(shù),2008,16(2):50-52.
[5]王幸軍,李本昌.線導(dǎo)魚雷靶場散布分析[J].魚雷技術(shù),2006,14(2)54-56.
[6]張克輝,溫洪,劉勇.目標(biāo)運動要素誤差對尾流自導(dǎo)魚雷自導(dǎo)開機距離的影響[J].指揮控制與仿真,2010,32(5):102-104.
[7]趙正業(yè).潛艇火控原理[M].北京:國防工業(yè)出版社,2003.
