船舶雷達/ARPA 智能考試系統的研究
2011-08-16 02:23:50陳麗寧任鴻翔金一丞
重慶交通大學學報(自然科學版) 2011年5期
陳麗寧,任鴻翔,金一丞
(大連海事大學航海學院航海動態仿真與控制交通行業重點實驗室,遼寧大連116026)
船舶雷達/ARPA模擬器是航海模擬器的重要組成部分[1]。聯合國國際海事組織 (International Maritime Organization,IMO)一直強調在航海教學、培訓中使用模擬器,并在STCW78/95中對模擬器的使用、性能標準提出了相應要求[2]。我國交通部在《中華人民共和國船員培訓管理規則》[3]中將雷達觀測與標繪和模擬器、ARPA列入海船船員專業技能培訓項目。可見,船舶雷達/ARPA模擬器在航海教學、培訓中起著重要的作用,是航海類院校及培訓機構必備的設備。目前國內雷達兩證考試的雷達標繪評估一直采用人工打分,該方式主觀性強且增加了考官的勞動強度,因此有必要開發一套考試系統來解決這些問題。要建立這樣的考試系統,需要從系統結構、雷達圖像的仿真、考試評估模型等幾個主要方面進行研究,其中考試評估模型的建立相對比較困難。國內一些學者對評估模型進行了研究。劉成勇[4]通過計算受訓人與系統標準值之間的離散程度,得出成績。鄭彭軍[5]運用基于模糊集的評估模型,通過比較受訓人實際操作與決策之間的離散度,從而給出評分。張飛成[6]運用基于數理統計的評估模型,通過計算觀測值與真值的偏離程度進行評分。薛滿福[7]的評估模型運用了隸屬度函數,結合操船避碰進行評分。
上述學者的研究主要集中在雷達標繪的評估模型研究,并沒有和實際模擬器有機結合起來,更沒有建立完整的考試系統。筆者在大連海事大學航海動態仿真與控制實驗室研制的V.Dragon 3 000船舶雷達/ARPA模擬器基礎上,對船舶雷達/ARPA智能考試系統的結構、功能等進行了分析,并提出了將專家法和隸屬度函數相結合的評估模型。由專家操作該系統出題,根據題目特點設置評估要素的權重及允許的誤差范圍絕對值。系統根據專家設定的權重和誤差范圍絕對值生成隸屬度函數,以此計算受訓人操作的隸屬度值及考試分數。
1 考試系統的結構設計
1.1 V.Dragon 3000船舶雷達/ARPA模擬器的系統結構與功能
船舶雷達/ARPA智能考試系統是以V.Dragon 3 000船舶雷達/ARPA模擬器為基礎開發。該模擬器是由一個教練員站和多個本船構成的仿真系統[8],各單元通過網絡連接,如圖1(a)。系統中每個本船主要由計算機、車舵操縱臺等組成,如圖1(b)。在模擬器中,教練員可以在教練員站設置練習,然后將設置好的練習發送給各本船,受訓人操縱本船,完成練習。
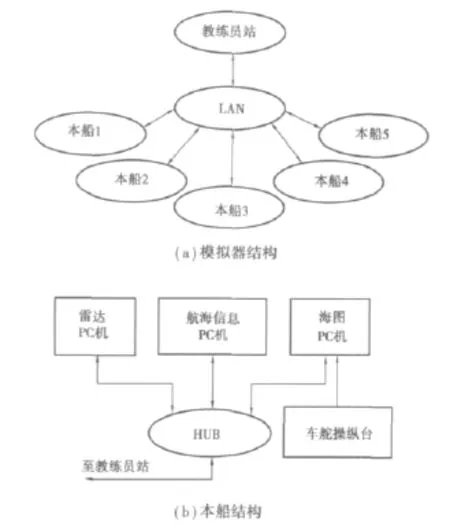
圖1 V.Dragon 3 000模擬器Fig.1 V.Dragon 3 000 simulator
1.2 船舶雷達/ARPA智能考試系統的結構與功能
船舶雷達/ARPA智能考試系統應由服務器和考試終端兩部分組成,系統的主要功能包括3大部分:①出題:進行出題操作,將考試題目(包括內容、考試時間、注意事項等)下傳到考試終端;②考試:考試終端根據下載的考試題目、內容和考試時間進行考試,并上傳考試記錄到服務器;③自動評估:考試終端對受訓人操作進行評估,給出考試成績。
結合V.Dragon 3 000船舶雷達/ARPA模擬器的特點,需對其進行相應的改進以實現考試系統的各項功能。教練員站適合作為考試系統的服務器,本船已具備考試終端的部分功能,可以將教練員站改造成服務器,將本船改造成考試終端。圖2為考試系統的結構圖。
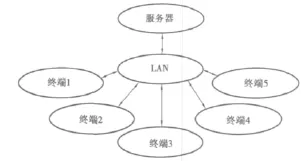
圖2 考試系統的結構Fig.2 Structure of examination system
服務器的主要功能包括:①選擇基本題型;②參數初始化:主要是出題人設置題目和初始化雷達面板部分參數;③試題文件傳輸;④數據管理:主要是建立數據庫管理受訓人考試成績和操作記錄。
考試終端的主要功能包括:①答題功能:受訓人登陸、考試計時及存儲答題過程;②評估功能:考試完畢后考試終端立即對受訓人操作進行自動評估并顯示考試結果;③試題文件傳輸。
2 考試系統評估模型的建立
本考試系統約有8種基本題型,并根據不同題型設置了不同的評估模型。下面以雷達開機和目標船的人工捕捉題型及雷達標繪題型為例加以介紹。
2.1 雷達開機和目標船的人工捕捉題型及其評估模型
雷達開機和目標船的人工捕捉題型主要考察受訓人對雷達面板上按鈕、開關的操作。由出題人在服務器設置雷達面板開關和按鈕的值,受訓人在考試終端操作雷達正常開機,并調節回波清晰飽滿,然后操作ARPA對目標船進行人工捕捉。根據V.Dragon 3 000模擬器特點和考試要求,采用專家評估法進行評估,具體評估模型的變量、評分標準及權重如表1。其中權重為專家在出題時根據經驗和題目特點設定。
2.2 雷達標繪題型及其評估模型
雷達標繪題型要求受訓人首先進行雷達標繪,然后根據標繪所得的避讓措施操縱車、舵進行避碰,避碰完畢后復航。本題型采用專家法和隸屬度函數相結合的評估方法[9],即通過隸屬度函數獲得評價指標的隸屬度,利用綜合評估法加權后獲得受訓人的評估成績。評估要素及權重如表2。選擇評估參數的依據是雷達標繪主要目的[10]及《1972年國際海上避碰規則》中能見度不良時行動規則的僅憑雷達測到他船條款及條款解釋[11]。隸屬度函數的選擇主要依據大連海事大學、集美大學雷達標繪實際操作評估標準。不同評估要素,其重要程度也不同,因此權重由專家在出題時根據評估要素的重要程度定。
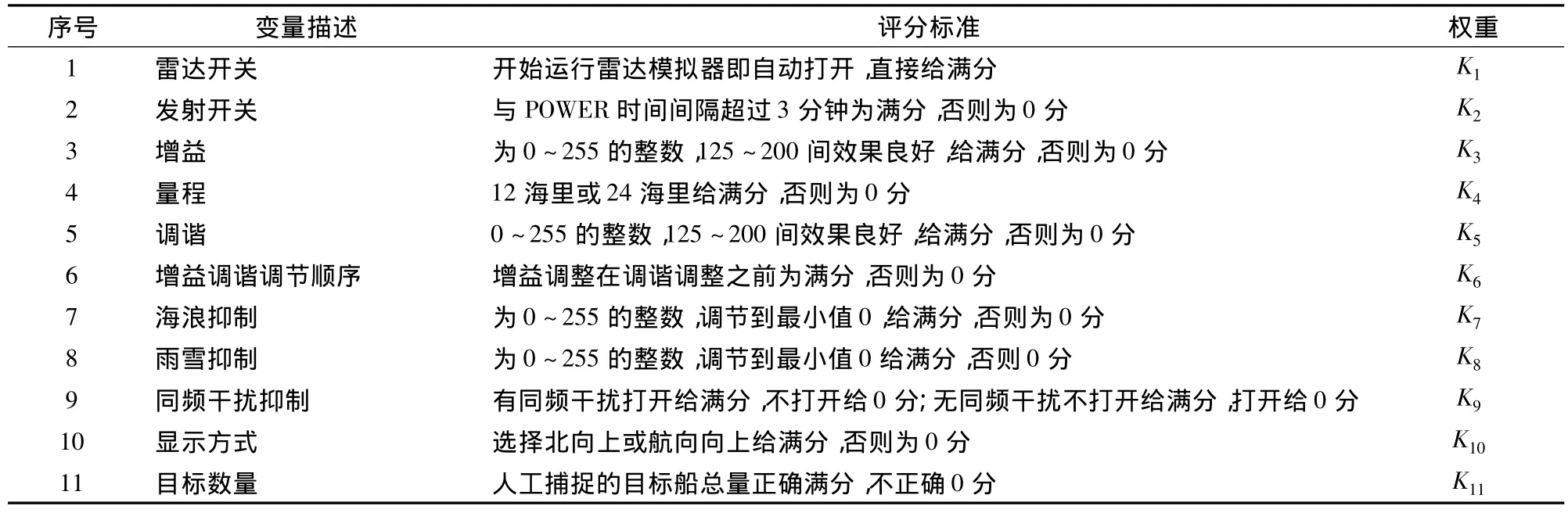
表1 雷達開機和目標船的人工捕捉題型評估權重及得分標準Tab.1 Assessment weight and scoring standards of radar starting and ARPA manual acquisition

表2 雷達標繪題型評估要素權重及隸屬度Tab.2 Weights and membership of radar plotting evaluation factor
受訓人總成績計算采用權重和隸屬度值加權平均,按照式(1):

式中:Ki為評估要素編號,見表2;μi為Ki對應評估要素的隸屬度值;s為總分。如果有3項評估要素的隸屬度為0,則受訓人的成績為0,就為不合格。
在表2中的9個評估要素中,這里僅選擇其中2個要素進行詳細說明。
1)觀測目標船的航向評估:要求受訓人用雷達/ARPA模擬器觀測目標船航向,目標船航向誤差標繪結果的隸屬度函數如式(2):
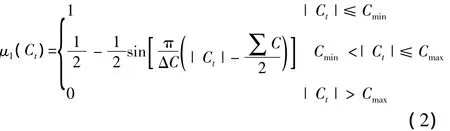
式中:μ1(Ct)為目標船航向差值隸屬度函數值;Ct為雷達標繪觀測目標船航向與目標船實際航向的差值;Cmax,Cmin分別為專家在出題時設定的允許誤差范圍絕對值的最大值和最小值;ΔC=Cmax-Cmin;∑C=Cmax+Cmin。
2)采取變速避讓的避讓幅度評估:隸屬度函數如公式(3):
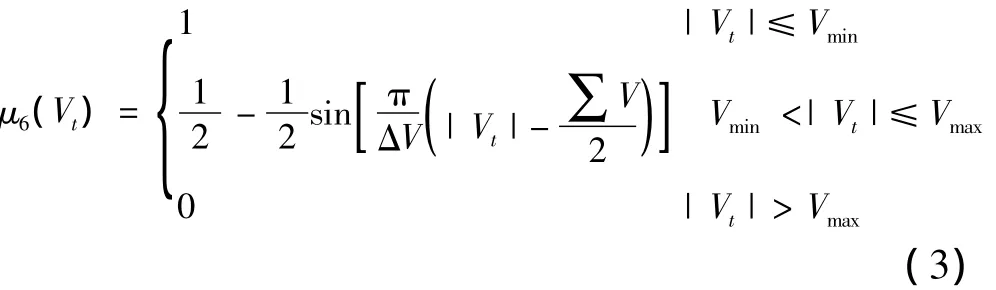
式中:μ6(Vt)為采取變速避讓幅度的隸屬度函數值為受訓人操船變速避讓后本船實際航速;Vp為計劃航速)];Vmax,Vmin分別為專家出題時設定的Vp允許誤差絕對值的最大值和最小值;
3 考試系統的軟件設計和實現
3.1 出 題
出題共分為5個步驟,如圖3。其中,第3步為設置雷達面板按鈕和開關的初始狀態,并寫明題目要求。出題人可以初始化的雷達面板數據包括:雷達顯示方式、調諧、增益、同頻干擾抑制、雨雪干擾抑制、固定局標圈亮度、量程、雷達顯示方式等。第4步設置海圖、本船及目標船界面如圖4。專家在第5步根據經驗和題目特點,設置評估要素權重和評估參數誤差范圍的絕對值。
3.2 答 題
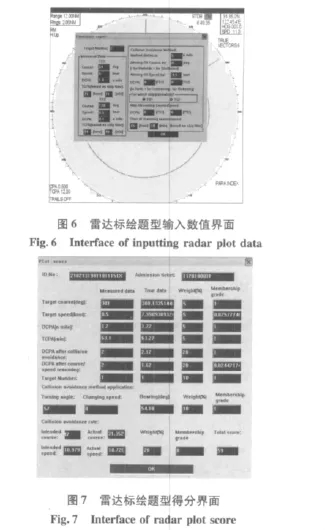
以雷達開機和ARPA人工捕捉題型題型為例,在進行該題考試時,只需操作雷達面板,其操作狀態會被系統記錄。雷達標繪題型總時間為70分鐘,具體時間分配如下:0~10分鐘,受訓人將車調整為全速,舵角為0,并調整雷達面板狀態,使雷達回波清晰,并閱讀題目要求。11~22分鐘,操作雷達的電子方位線和活動距標圈,每隔6分鐘進行一次觀測,圖5為受訓人操作雷達電子方位線和活動距標圈進行觀測界面。23~30分鐘,進行雷達標繪,根據觀測值求取目標船航向、航速、DCPA和TCPA,根據避碰規則確定避讓方式,求取相應的航向/航速恢復時機,并在考試終端進行相應數據的輸入,輸入界面如圖6。

考試結束后,受訓人可以在考試終端立即看到自己的考試成績。雷達標繪題型的得分界面如圖7。圖7所示的界面中,考核指標的觀測值、真值、指標權重、隸屬度、總分等信息都顯示出來。
3.3 服務器數據庫的建立
數據庫主要包括2類信息:受訓人基本信息和操作記錄,因此可主要分為2個表:受訓人基本信息表和操作記錄表。受訓人基本信息表包括:身份證號碼、考試時間、學號、考試分數、考試類型、人工捕捉的目標船數量、實際目標船數量;操作記錄表包括:準考證號碼、考試時間、操作時間、調諧、增益量程、雨雪干擾抑制、海浪干擾抑制、同頻干擾抑制、雷達顯示方式等。數據庫訪問采用ADO技術[12]。考試系統以文本傳輸協議(File Transfer Protocol,FTP)實現考試文件在考試終端與服務器間的傳輸。
3.4 軟件測試
考試系統軟件編寫完畢后,筆者邀請大連海事大學航海學院老師和同學進行了軟件測試,比較了人工評判分數和考試系統分數。共進行了50個抽樣。令ΔS為人工評判分數和考試系統分數差值的絕對值,抽樣中ΔS≤5占總數28%,5<ΔS≤10占總數58%,ΔS>10占總數14%。可見人工評判和考試系統評判分數基本一致。
4 結語
筆者在V.Dragon 3 000船舶雷達/ARPA模擬器基礎上開發了船舶雷達/ARPA智能考試系統(如圖8)主要工作有:
1)研究了船舶雷達/ARPA智能考試系統的總體結構和功能。
2)對原模擬器進行改進,增加新功能,將原模擬器的教練員站改造成考試系統的服務器,將原模擬器本船改造為考試系統的考試終端。
3)提出了將專家法和隸屬度函數相結合的評估模型。
建成的船舶雷達/ARPA智能考試系統已在船員實際考試中得以應用,取得了較好的效果。在今后的工作中,考慮對船舶雷達/ARPA智能考試系統做進一步的改進,如完善評估數學模型以及提高考試系統的安全性等。

圖8 已安裝考試系統的雷達模擬器Fig.8 Radar simulator installed with the examination system
[1]金一丞,尹勇.STCW公約與航海模擬器發展[J].大連海事大學學報,2002,28(3):53-56.JIN Yi-cheng,YIN Yong.STCW convention and the development of marine simulator[J].Journal of Dalian Maritime University,2002,28(3):53-56.
[2]聯合國國際海事組織.經1995年締約國大會通過修正的1978年海員培訓,發證和值班標準國際公約[M].中華人民共和國港務監督局,譯.北京:中國科學技術出版社,1997:65-66,151-157,163-181.
[3]中華人名共和國交通運輸部.中華人民共和國船員培訓管理規則[DB/0L.].http://gov.cn/flfg/2009-08/14/content_1391833.html.
[4]劉成勇.雷達模擬器評估系統的設計與分析[J].武漢理工大學學報:交通科學與工程版,2002,26(1):134-137.LIU Cheng-yong.Design and analysis of assessment system of radar simulator[J].Journal of Wuhan University of Technology:Transportation Science& Technology,2002,26(1):134-137.
[5]鄭彭軍.航海模擬器客觀評分系統的設計[J].中國航海,1997,33(1):54-57.ZHENG Peng-jun.Design of objective grading system of nautical simulator[J].Navigation of China,1997,33(1):54-57.
[6]張飛成.雷達/ARPA模擬器訓練系統的設計與研究[D].大連:大連海事大學,2007.
[7]薛滿福.基于模擬器的雷達標繪評估方法研究[D].大連:大連海事大學,2008.
[8]尹勇,金一丞,李志華.分布式航海仿真系統中的網絡通訊[J].系統仿真學報,2000,12(6):622-624.YIN Yong,JIN Yi-cheng,LI Zhi-hua.Network communication in distributed marine simulation system[J].Journal of System Simulation,2000,12(6):622-624.
[9]陳麗寧.船舶雷達/ARPA智能考試系統的設計與實現[D].大連:大連海事大學,2010.
[10]Burger W.Radar Observer’s Handbook for Merchant Navy Officers[M].sixth edition.Glasgow:Brown,Son & Ferguson Nautical Publishers,1976:148-150.
[11]吳兆麟.船舶避碰與值班[M].3版.大連:大連海事大學出版社,2008:44-46,75-77,132-136.
[12]Iseminger D.SQL Server 2000 Architecture and XML/Internet Support[M].Peking:Peking University Press,2000:324-325.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45