基于自組織映射神經網絡的VANET組網算法
2011-08-10 01:51:22吳怡楊瓊吳慶祥沈連豐林瀟
通信學報 2011年12期
吳怡,楊瓊,吳慶祥,沈連豐,林瀟
(1. 東南大學 移動通信國家重點實驗室,江蘇 南京 210096;2. 福建師范大學 物理與光電信息科技學院,福建 福州 350007)
1 引言
智能交通系統(ITS, intelligent transportation systems)[1]將先進的計算機技術、信息技術、通信技術、自動控制技術、人工智能及電子技術等有效地運用于交通運輸中,是構建準時、精確、高效交通運輸管理體系的基礎。汽車輔助駕駛是ITS的重要研究領域,它將逐步打破由駕駛員觀察道路并控制車輛而形成的“車—路—人”的傳統,形成“車—路”閉環控制的新模式,最終實現無人自動駕駛[2]。
車輛的自動駕駛必須明確知曉其目的地和行駛路況,包括行駛路線以及與其他車輛間的位置關系等,這就需要建立車輛間的無線信息網絡,車輛自組織網絡(VANET,vehicular ad hoc network)已成為目前一個重要的研究課題,它是道路上車輛間、車輛與固定接入點之間相互通信組成的開放移動自組織網絡[3],車輛間信息的交互通過自組織形成的網絡來實現。對于VANET研究目前還面臨許多挑戰。例如,VANET沒有一個中心協調或握手協議,大多采用廣播的方式傳送信息,周圍車輛數目很大時,全部車輛采用一個公共信道通信將會非常擁擠或阻塞;VANET的節點是運動的,隨時有節點加入和離開網絡,這個特點為信息的可靠傳輸[4]和路由帶來許多挑戰性的難題。近年來研究者從VANET路由協議[5]、網絡的組網方式等多方面進行研究。文獻[6]對2009年以前的相關技術做了介紹,文獻[7]對近年來VANET MAC層協議方面的研究進行了討論。從近期發表的研究成果來看,對運動車輛進行分簇的方法吸引了許多研究者[8~13]。文獻[8]提出了基于區域的聚類機制,將同一區域內的車輛作為一簇,通過傳遞信息到基站主干網絡后與其他區域的車輛進行通信,利用安裝在道路旁的基站實現不同簇群車輛間的通信;文獻[9]采用類似機制;文獻[10~12]分別提出了基于信道、地址的分簇通信機制;文獻[13]利用集成VANET和3G這2個異構的無線網絡,提出了動態聚類的機制自適應移動網關管理方案,使得車輛族群間通過移動網關進行通信。目前這些方法都不同程度地減小了VANET信息阻塞,但這些方法在車輛進入不同地域時要改變連接或網關。
在城市交通系統中,道路狀況特別復雜,尤其是在道路交叉地段,車輛通行復雜,有等待、直行、左轉、右轉等變化,有T字、十字、多叉、轉盤等路況,經常會形成數百甚至更多車輛的聚集,考慮到VANET網絡有較大的覆蓋范圍,如果不加區別地將它們都納入網絡將會使網絡十分龐大以致沒有足夠的頻率、時間等資源予以支撐,反而會使必須參與組網的車輛相互間的通信可靠性變差、實時性變壞。為了建立一個具有穩定連接、較長時間互通交通信息的VANET系統,本文提出利用自組織映射(SOM,self-organizing map)神經網絡進行動態組網,將屬性相近的車輛組成子網,以達到減少延遲,提高吞吐量之目的。例如將運動方向相同的車組成子網,保持連接時間可以較長,避免當車駛出一個分組地域進入另一個分組地域時要換到另一區分組,車可以較長時間地保持在同一網內互通信息,從而提供可靠的運動車輛間的通信,成為ITS通信保障的組成部分之一。
本文的其余部分安排如下:首先介紹自組織映射神經網絡算法的具體內容及實現;然后討論如何將SOM神經網絡應用于VANET的組網,給出組網方案和具體算法,并針對系統吞吐量、傳輸時延及SOM算法的復雜性等進行了分析;最后論述仿真情況及其應用于ITS的一些考慮。
2 自組織映射神經網絡及其學習步驟
SOM神經網絡是一種無監督學習的神經網絡[14],具有很強的聚類功能,通過對輸入樣本的自組織學習,能夠將聚類結果在輸出層中顯示出來。SOM在眾多領域都得到了應用,例如,文獻[15,16]將SOM應用于圖像處理,文獻[17~19]將SOM應用于客戶分群。
文獻[14]已經證明,SOM網絡通過對輸入數據的反復學習,可使連接權重權矢量空間分布密度與輸入數據的概率分布趨于一致,連接權重權矢量空間分布可以被用來描述輸入數據的聚類統計特征。SOM神經網絡如圖1所示。設輸入特征矢量X=(x1, x2,…,xi,…,xn)T并行連接到網絡中m個神經元中的每一個神經元,每個神經元對應一個權重向量Wj,Wj有n個分量且表示為wij(i=1, 2, …, n;j=1, 2,…, m),它的值通過自組織學習來確定。
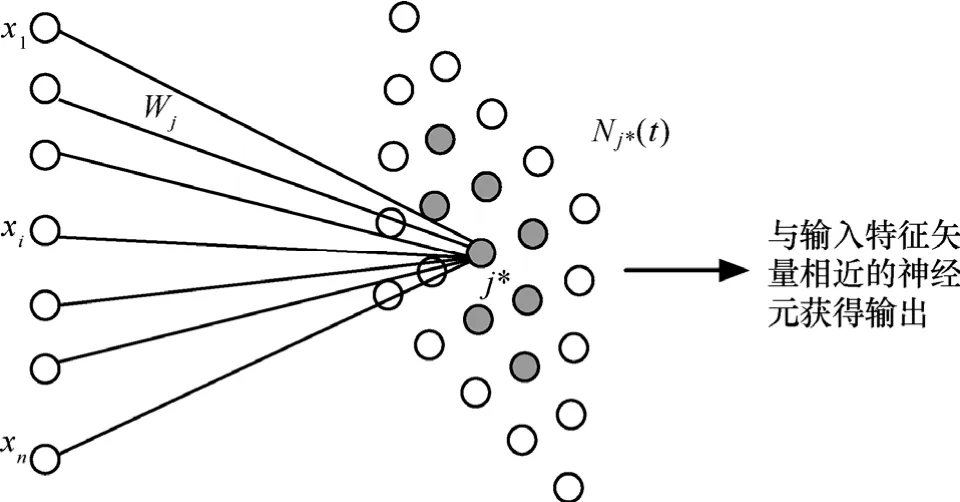
圖1 自組織映射神經網絡
SOM網絡的自組織學習過程可分為2個部分:一是選擇最佳的匹配神經元,另一是權矢量的自適應更新。在做最佳匹配時,根據輸入特征向量X,將每個神經元的權向量與其比較,通過選擇最近距離來確定獲勝神經元j*,即,使j*滿足。然后進行權矢量的自適應更新,對以j*為中心的周圍Nj*(t)以內的神經元的權向量,按文獻[14]給出的學習規則進行調整,有

其中,t為學習次數變量,t=0, 1, 2,…, T;η(t)為學習速率,它隨學習的次數而衰減,且0<η(t)<1。
SOM網絡自組織學習的步驟歸納如下。
1) 初始化。將網絡的連接權{wij( t)}賦以[0,1]區間的隨機值,i=1, 2, …, n;j=1, 2, …, m。確定鄰域Nj*(t)的初始值Nj*(0)、學習速率η(0)和總的學習次數T。
2) 選取k個學習特征向量中的一個特征向量X=(x1, x2,…,xi,…,xn),提供給網絡的輸入層,作歸一化處理,即

3) 對連接權矢量Wj=(w1j,w2j,…,wnj)進行歸一化,即

4) 計算距離。采用歐式距離來計算,其表達式為

5) 在m個神經元中找出最小的距離dj*,確定獲勝的神經元j*,即使dj*=min{dj}。
6) 調整連接權矢量。對競爭層鄰域,即以j*為中心的周圍Nj*(t)以內的神經元,與輸入層神經元之間的連接權矢量進行更新,即
7) 選取另一個學習特征向量提供給網絡的輸入層,返回到步驟3),直至k個學習特征向量全部提供給網絡。
8) 更新學習速率η(t),即

其中,(0)η為初始的學習速率,t為學習次數,T為總的學習次數。
9) 更新鄰域Nj*(t)。設競爭層神經元j在二維陣列中的坐標值為(xj,yj),則鄰域的范圍是由如下4個點組成的正方形:(xj+Nj*(t),yj+Nj*(t )),(xj+Nj*(t),yj-Nj*(t )),(xj-Nj*(t),yj-Nj*(t )),(xj-Nj*(t),yj+Nj*(t ))。鄰域Nj*(t)的更新表示式為

其中,INT[ ]為取整符號,Nj*(0)為Nj*(t)的初始值。
10) 令t=t+1,返回步驟2),直至t=T為止。
上述步驟亦稱為SOM算法,圖2給出了該算法流程。
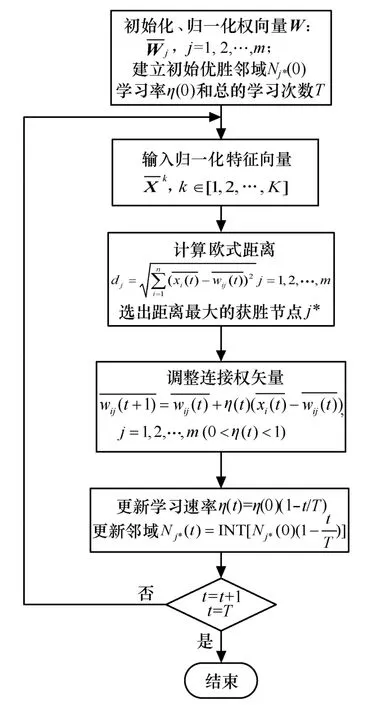
圖2 SOM網絡自組織學習的流程
3 基于SOM神經網絡的行駛車輛組網方案及其性能分析
3.1 車輛組網方案
車輛間聯網要面對的實際場景千變萬化,例如:車輛的快速移動將使其接收到的無線信號強度變化很大;在網絡的覆蓋范圍內會頻繁地有車離開或加入,從而導致聯網的車輛數隨時間變化很快;在城市交通密集的地方,道路上行駛的車輛非常多,尤其是在交叉路口等地段,很多車輛在彼此的廣播消息覆蓋范圍內,如果每輛車均與其附近的車輛組網,接收其他車的廣播消息并再轉播,輕則引起系統的分組丟失率增加、吞吐量下降、傳播時延加大,重則發生信息堵塞從而導致通信中斷。為此,本文在行車安全的前提下給出對眾多車輛進行分組的方法,提出利用SOM神經網絡將車輛分組的方案,排除掉覆蓋區內完全沒有必要聯網的車輛以盡可能保障組網車輛足夠的頻率資源和實時性要求,建立相對穩定的動態車輛自組織網絡。本文把這一方案稱為基于自組織映射神經網絡的VANET組網算法(簡稱組網算法),其核心內容是基于SOM的車輛分類方法,亦稱為分類算法或SOM算法。
自組織映射神經網絡具有很強的聚類功能,通過車輛提供的參數,可將屬性相近、目的地相近的車輛組織成同一個運動的通信網,使這些車輛可較長時間保持通信。自組織映射神經網絡有能力綜合多個模糊參量進行聚類,在組網時可靈活地處理各種參量。SOM神經網絡與其他模糊算法相比,其優點主要有對初始值不敏感、可以實現實時學習,網絡具有自穩定性,無須外界給出評價函數,能夠識別向量空間中最有意義的特征,抗噪音能力強等,缺點是算法迭代時間較長,但是由于SOM算法本身是一種并行結構,因此特別適合用FPGA等硬件實現,嵌入到動態組網系統中。
本文研究的車輛組網算法基于一種時隙同步的車輛間通信系統,采用類似時隙ALOHA的接入控制機制。組網的車輛在每個時隙以概率p競爭信道的使用權,如果2個或2個以上用戶同時爭用信道則發生數據分組的碰撞,認為該數據分組丟失。傳統的ALOHA系統中,需要接收節點到發送節點的反饋信道,根據反饋信息,用戶可以重傳未被成功接收的數據分組。本文研究的系統無需反饋信道,沒有接收者的反饋信息,發送者不知道其發送的數據分組是否丟失,稱之為隨機接入機制。在本文的研究場景中假定每輛車總是有待發送的車載通信數據以廣播方式發送給組網的其他車輛。即設定道路上行駛的每輛車總是要發送自己的車載通信數據報文,該報文中含有車輛的多維信息,包括:設備識別碼、通信模式、優先等級、能量信息、聯網狀態、分組情況(所屬的子集)、位置信息(從GPS獲得的經、緯度或從其他通信系統獲得的電子地圖坐標位置等),移動信息(例如速度矢量等)、緊急情況標識(例如危險等級、求救信息等)以及用戶數據。通信數據報文的結構如圖3所示。
下面以車輛是否到達路口等候交通指示燈場景為例來說明組網算法,這種情形算法的流程如圖4所示。從接收到其他車的車載通信數據報文中挑選“當前位置(經度)”、“當前位置(緯度)”、“目的地位置(經度)”、“目的地位置(緯度)”、“當前行駛方向”、“經過路口后行駛方向”等數據作為 SOM 神經網絡的輸入特征矢量,并根據分組的要求設置 SOM 神經網絡的輸出最大分類、神經網絡總的學習次數T和學習率η (0)等。如果要求分組較細,可加大最大分類和學習次數,減小學習率。
該組網算法在所提場景工作的具體描述如下:車輛經過一段行駛時間(可預設,市區行駛暫默認為30s)或者到達路口等候交通指示燈時,啟動SOM車輛分類算法,接收通信范圍內所有其他車輛發來的報文消息,選擇其中的分類數據構成輸入矢量,輸入SOM算法進行處理。SOM算法依據報文消息中的分類數據對所有車輛進行分類組網,運行SOM算法后的車輛便知道與其在同一分組中的車輛有哪些,將這些車輛記入其分組列表中,并賦予相應的分組編號。算法運行后,如果只有一個分組,則提高組網的每個用戶的發送概率p,其他未組網的用戶保持其發送概率p不變,這樣組網的用戶可以占用更多的信道資源相互通信。如果SOM算法運行后,分組數大于 1個,則同一分組中的用戶跳頻至其他頻率通信,同時也提高自己的發送概率,以降低傳輸時延,跳頻后的車輛每隔一段時間仍然在公共信道發送自己的數據分組,所有的車輛也在公共信道上對所有的數據分組偵聽,一旦需要重新組網時,利用偵聽到的數據分組中的信息重新組網。此外,對于分組后的單個用戶而言,在下一次接收到其他車的報文消息時,只接收并處理在同一個分組中的車輛的信息,對其他車輛的信息僅解析其中的一部分而不是全部接收,這就有效地保障了組網車輛的通信資源。車輛在路上行駛中,保持與組網列表中的車輛間的通信,如果車輛駛至下一個路口或經過已經設置的一段固定時間后,再次啟動SOM車輛分類組網程序,運行SOM算法找到新的組網車輛。

圖3 車載通信數據報文格式
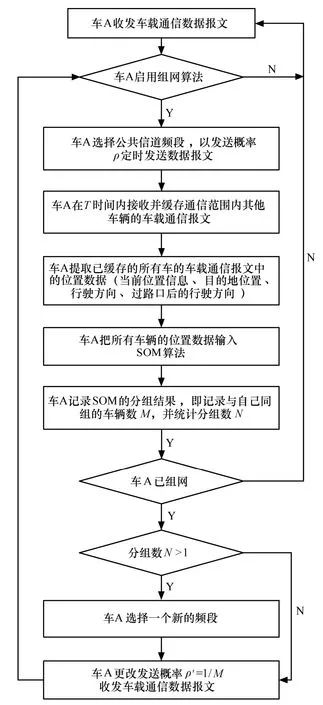
圖4 基于SOM神經網絡的行駛車輛組網方案流程
組網算法在非市區情況(郊區、農村、省道、國道、高速公路等)比市區情況將有所簡化,但其核心思想與市區情況基本相同,實際算法還必須考慮非常多的細節,這里不再詳述。
3.2 算法性能分析
本文提出的基于SOM算法的分類組網方案主要由SOM算法和基于隨機接入的數據分組發送與處理這2部分組成。由圖2可見本文提供的SOM算法的復雜度約等于O(KMT),這里K為分類的車輛數,M為神經元個數,T為訓練次數。由于算法只是在需要重新組網時才啟動,因此整個組網方案的主要性能還是取決于所采用的接入機制。而且由于SOM算法本身具有極強的并行數據處理能力,當采用FPGA等硬件實現時,算法運行所需時間更短。因此本節從信道資源利用率的角度,重點研究VANET的系統吞吐量和傳輸時延這2個性能指標,分析經過分類組網后的性能改善情況。
為了分析的方便,定義一幀中成功發送數據分組的時隙數占總時隙數的比例為系統吞吐量。
在隨機接入方式中,假設用戶k(k=1, 2,…, M)在時隙l(l=1, 2,…, L)以概率pk(l)發送數據分組,組網的用戶節點總數為M,系統總的傳輸時間為L個時隙。用戶相互獨立地發送數據分組,Il=1表示在時隙 l有一個用戶發送消息,Il=0表示沒有用戶發送消息或者多于1個用戶發送消息。因此有

定義平均系統吞吐量為

在本文研究的系統中,假定每個用戶的發送概率相同,其值為p,則可得平均系統吞吐量為

由式(10)可見,系統的平均吞吐量與網絡中的用戶數及用戶的發送概率有關,下面分析一下當要獲得最大的系統吞吐量時的用戶的發送概率。

可見,在隨機接入控制方式中,如果每個用戶能夠知道組網的用戶數,并將其發送概率設置為組網用戶數的倒數時,系統可以獲得最大的吞吐量。
下面繼續分析隨機接入系統的傳輸時延。傳輸時延定義為從某個時刻起一個車輛節點成功地收到周圍一跳通信范圍內所有其他車輛節點至少一個數據分組所用的時隙數。
當每個用戶以相同的概率p發送數據分組時,上述分析可知,在某個時隙有成功數據分組發送的概率為

設用戶 k在第 Xjk時隙第一次成功地接收到用戶j的數據分組,則其概率分布函數為


式(14)即為本文所研究的隨機接入系統的傳輸時延。可見,E(Xk)與發送概率p有關,當α最大時,傳輸時延最小。同樣可以得出當p=1/M時,系統有最小的傳輸時延性能。此外,從式(14)還可得出當網絡中的用戶節點數M越大時,系統的傳輸時延也越大。
從上述分析可見,如果能夠知道組網的車輛節點數目,則每個組網節點可以通過調整其發送概率使系統獲得最優的吞吐量性能;通過將車輛分組控制組網的車輛節點數,可以降低傳輸時延。本文提出的SOM算法可以實現將車輛按照所關注的相關信息進行分類組網。
4 組網性能仿真及其結果分析
4.1 仿真實例
為了驗證組網算法,利用Matlab編寫了組網算法的仿真程序,將仿真場景中所有車輛的6項數據矩陣(即:當前位置—經度、當前位置—緯度、目的地位置—經度、目的地位置—緯度、當前行駛方向、經過路口后行駛方向)進行標準差標準化之后導入SOM網絡,作為輸入特征矢量,輸出的神經元個數取決于將網絡最終分為幾類。
下面以某市某路口(實際情況為“福州市五一路與古田路交叉路口”,如圖5所示)任選一時刻的車輛情況截圖為例來說明本文算法的應用。在該觀察時刻共有41部車位于該路口4個不同方向上,假定這些車輛彼此都在通信可達范圍內,圖中箭頭所示為道路上車輛的行駛方向,用方框標識的車經過下一個路口后會沿交通指示轉彎,其余車輛均沿所在道路直行。將所有車的相關信息參數輸入到SOM算法,作為數字實例,比如選擇最大分類為5,學習率為0.000 2,最大學習次數為500,算法運行后得到如表1所示分組結果。參數中最大分類代表的是分組后可能得到的最大分組數,實際分組的結果并不一定會達到最大分組數,分組結果與輸入數據密切相關。學習率表示算法運行過程中對每次學習的調整范圍,學習率越小,調整范圍越小。在實際運用中可根據城市交通狀態、城市中的車輛數目等參數來決定學習率及最大分類的選取。
從表1的結果可以看出,SOM神經網絡有能力將相近目的地和相近方向的車輛分成同一組。因此,可按分組結果將屬于同一個組別的車輛組成同一個網絡,接收并處理組網車輛的信息。
4.2 仿真結果及其分析
用 NS2仿真軟件建立本文所提方案的車輛間通信模型,將組網算法的MATLAB程序移植到NS2仿真平臺下。假定每輛車裝有GPS或其他設備(例如為提高精度而采用差分 GPS),可以得到自己的位置、行駛速度、行駛方向等信息。車輛間通信基于隨機接入模式,每輛車以概率p競爭傳輸時隙。每輛車的發射功率相同,傳輸范圍 300m,車子啟動后的行駛速度為50km/h。車輛采用廣播方式發出自己的車載報文消息。首先建立圖5所示場景的仿真模型,車輛在此路口等候交通指示燈時,每輛車啟動SOM網絡算法進行車輛組網選擇。在表1所示分組結果中的每一組選取一輛車,觀察該車行駛一段時間(例如30min)后,與之保持組網的車輛情況,結果如圖6所示。
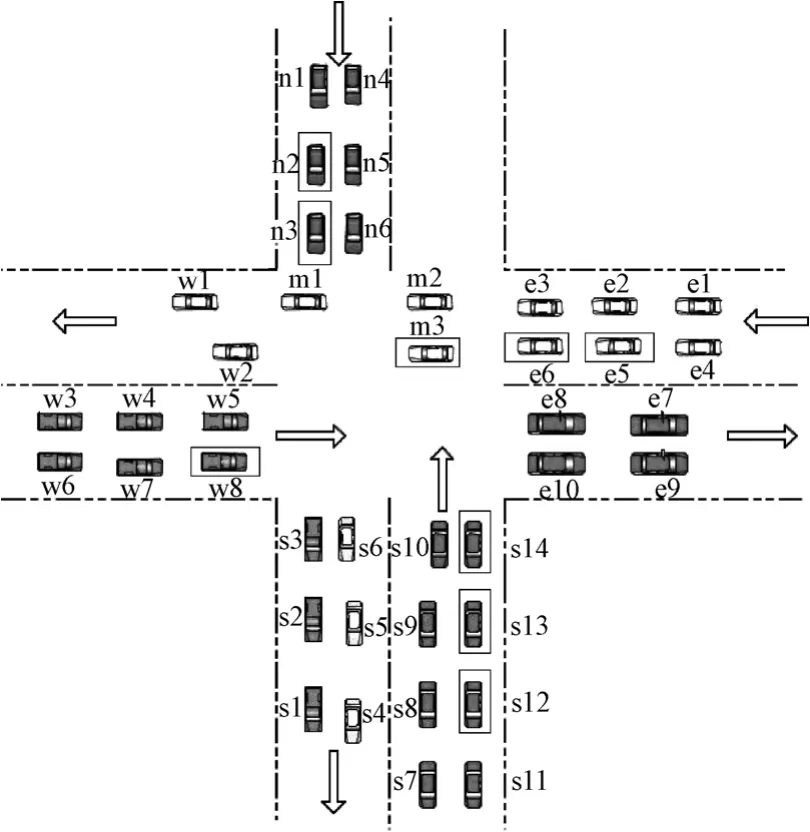
圖5 某市某路口某時刻車輛情況
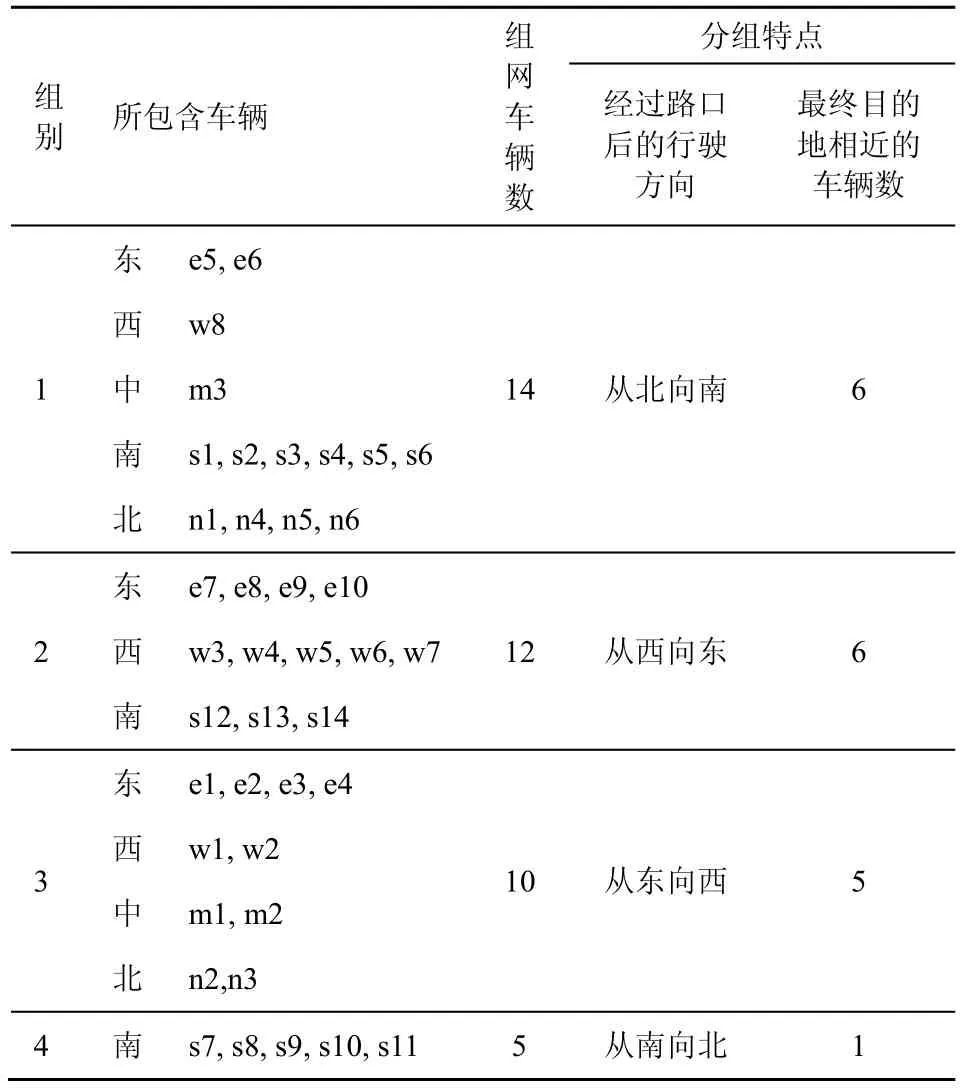
表1 路口車輛經SOM網絡算法分組
由圖6可見,經過SOM算法對路口不同目的地及不同行駛方向的車輛分組后,經過一段行駛時間,分組中的目的地相近的車輛仍然能夠保持在通信組中。本實驗設置了一些車輛具有相同的目的地,仿真結果發現,目的地相同的車輛最終仍然在同一通信分組。說明采用SOM算法對車輛進行分組,分組網絡確保了準確性和穩定性。
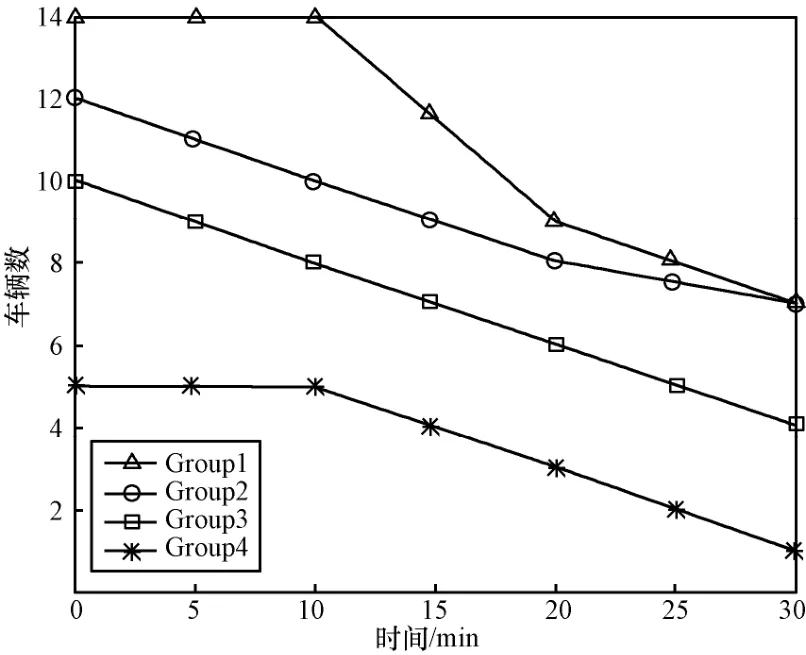
圖6 SOM組網后30min內不同分組中車輛數變化情況
表2比較了以下2種情況下系統的吞吐量和傳輸時延:1) 通過SOM算法對車輛進行合理分組,分組后的車輛調整其發送概率,且只與本組中的車輛進行通信;2) 不采用SOM算法分組,車輛以初始發送概率(這里發送概率的值設置為1/50)與在其通信范圍內的所有車輛進行通信,接受并處理一跳范圍內所有車輛的信息。

表2 系統吞吐量及傳輸時延
從表2可見,經過SOM分組后,每個分組中的車輛數保持在 10部左右,而在路上行駛時在彼此通信范圍內的車輛數都會在 30部以上,車輛密集時會達到 60部以上,經過分組后,通信的車輛數大大降低。由于只與組網的車輛通信,經 SOM分組后的傳輸時延遠低于與全部車輛通信的傳輸時延;同時,系統的吞吐量特性良好,且平均每輛車的吞吐量得到顯著提高。
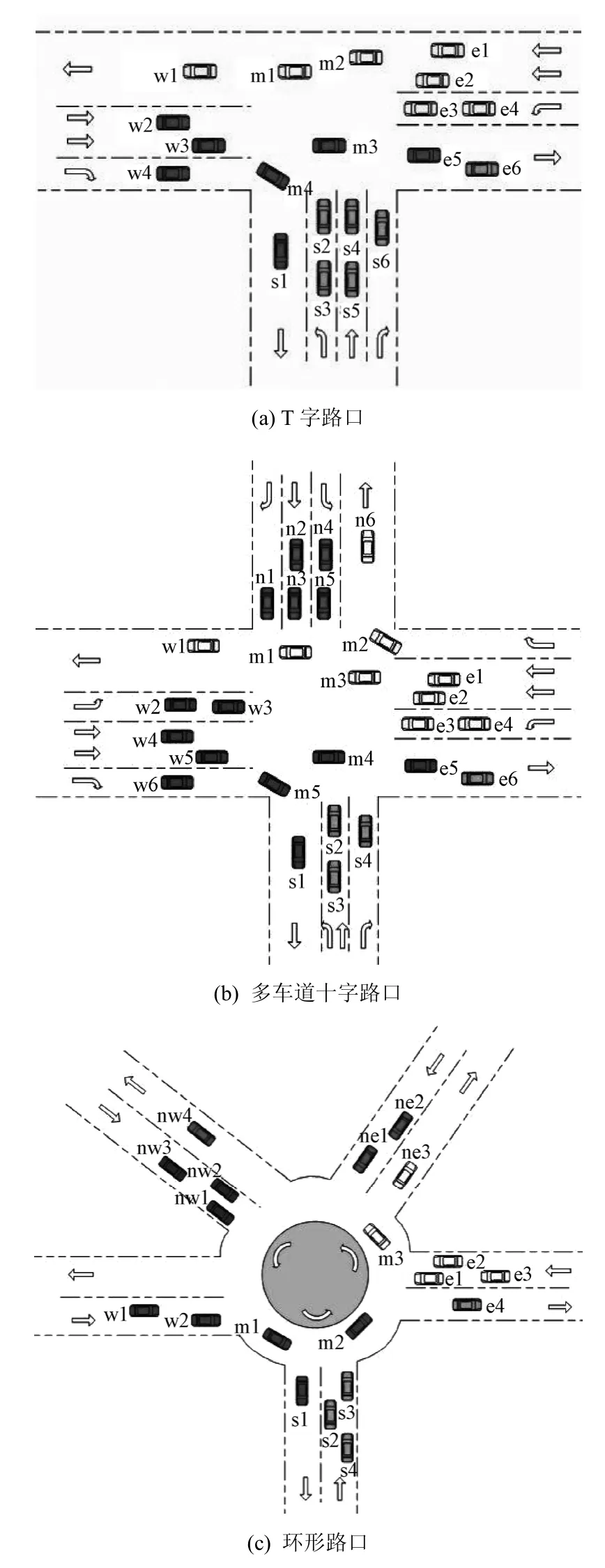
圖7 幾種場景的示意
設計的算法對城市實際道路中的各種場景均適用,包括T字路口、十字路口、五岔路口、多叉路口、直行道路、轉盤、繞城公路等,圖7給出了其中幾種場景。為了比較簡單直觀地描述算法中作為 SOM 神經網絡輸入特征矢量的“當前行駛方向”和“經過路口后行駛方向”這2類數據,4.1節中的仿真實例選擇的是車輛在十字路口等候交通指示燈的典型場景為例,而在城市實際道路中,道路的布局很少如此規整,尤其是在轉盤路口和繞城公路路段,設計的算法將會采用方位角來描述這2類數據。另外,該算法不但適用于車輛在路口等候交通指示燈的場景,對于正常行駛路段和無需等待交通指示燈的路口同樣適用。如果用FPGA芯片來實現該SOM算法或采用高性能 ARM核構成片上系統(SoC,system overchip),算法的執行時間可遠低于1s,車輛以正常速度通過無需等待交通指示燈的路口時完全可以完成SOM分組,該算法仍然有效。
下面給出幾種具體截圖的仿真結果,包括:五岔路口的93輛車經SOM網絡算法分成5個通信組,每個通信組的車輛數目分別為 27、21、18、15、12;十字路口62輛車分為4個通信組,每個通信組的車輛數目分別為21、16、13、12;丁字路口的40輛車分為3個通信組,每個通信組的車輛數目分別為16、14和10。上述場景車輛的通信范圍為200m。圖8顯示了五岔路口、十字路口和丁字路口經過SOM分組后,挑選其組網車輛數最多的分組中的一輛車,觀察該車在其行駛過程中,只與同通信組中的車輛進行通信的傳輸時延,以及與其通信范圍內所有車輛通信的傳輸時延,圖9為同樣情況下的系統吞吐量。比較結果顯示,經過SOM網絡分組后車輛間通信能夠維持通信組中較高的系統吞吐量和較低的傳輸時延。
由以上仿真結果可見,采用本文提出的 SOM組網算法可以有效地將屬性相近、目的地相近的車輛組成同一個 VANET,由于組網后可獲取網內的車輛數,組網的車輛可以自適應地改變自己的發送概率 p,從而使系統吞吐量提高、傳輸時延下降,信道資源利用率更高。圖8和圖9的仿真結果與3.2節的分析結果相符合。

圖8 車輛組網后通信的傳輸時延比較

圖9 車輛組網后通信的系統吞吐量比較
5 結束語
智能交通對于國民經濟發展起到重要作用,汽車輔助駕駛是ITS的重要研究領域,它們都離不開車輛的組網通信。由于組網的車輛變化快、具有較強的臨時性,車輛間通信主要采用廣播方式,在一跳范圍內所有的車輛節點都能收到廣播消息,如果此消息需要向遠處傳遞,還要通過節點進行轉播。假如所有的車輛都工作在相同的通信頻道廣播自己的行駛信息,每部車都會收到許多非關注用戶的消息,將收到的信息再廣播出去,很容易造成廣播風暴,因此,有選擇地與周圍車輛聯網具有非常重要的意義。本文提出一種將自組織映射神經網絡算法應用到車輛自組織網絡的分組中,利用行駛車輛的參數選擇合適的車輛組網,既提高了通信可靠性,減小了傳輸時延,又具有更高的系統吞吐量,保證了網絡通信的穩定性,不僅可以應用于汽車輔助駕駛等領域,也為未來的無人駕駛提供一種車輛間聯網的方法。算法既可以通過純軟件實現,也可以采用FPGA芯片實現,具有較大的靈活性。
如何將這一算法應用于實際的各種復雜場景以及在車輛快速運動中來實現,是需要進一步研究的課題。
[1] MASAKI I. A Brief History of ITS[R]. USA: Massachusetts Institute of Technology, 1999.
[2] PARENT M, YANG M. Road map towards full driving automation[A].Proceedings of 8th International Conference on Application of Advanced Technologies in Transportation Engineering[C]. Reston, VA:ASCE and T&DI, 2004. 663-688.
[3] 常促宇,向勇,史美林. 車載自組網的現狀與發展[J]. 通信學報.2007, 28(11): 116-126.CHANG C Y, XIAN Y, SHI M L. Development and status of vehicular ad hoc networks[J]. Journal on Communications. 2007, 28(11):116-126.
[4] ZHANG Z J, MAO G Q, ANDERSON B D O. On the information propagation process in mobile vehicular ad hoc networks[J]. IEEE Transactions on Vehicular Technology, 2011, 60(5): 2314-2325.
[5] WANG G L, BORCEA C, NZOUONTA J, et al. VANET routing on city roads using real-time vehicular traffic information[J]. IEEE Transactions on Vehicular Technology, 2009, 58(7): 3609 -3626.
[6] HARTENSTEIN H, LABERTEAUX K P. A tutorial survey on vehicular ad hoc networks[J]. IEEE Communications, 2008,46(6):164-171.
[7] BOOYSEN M J, ZEADALLY S, ROOYEN V. Survey of media access control protocols for vehicular ad hoc networks[J]. IET Communications, 2011, 5(11): 1619-1631.
[8] LAI Ye C, LIN P, LIAO W J, et al. A region-based clustering mechanism for channel access in vehicular ad hoc networks[J]. IEEE Journal on Communications. 2011, 29(1): 83-93.
[9] WANG T C, WANG G. TIBCRPH: traffic infrastructure based cluster routing protocol with handoff in VANET[A]. 2010 19th Annual Wireless and Optical Communications Conference(WOCC)[C]. 2010. 1-5.
[10] KIM T, JUNG S, LEE S. CMMP: clustering-based multi-channel MAC protocol in VANET[A]. The Second International Conference on Computer and Electrical Engineering ICCEE[C]. 2009.380-383.
[11] AHMED B S, XIA C H, LI W, et al. Cluster based addressing scheme in VANET (CANVET stateful addressing approach)[A]. 2011 IEEE 3rd International Conference on Communication Software and Networks (ICCSN)[C]. 2011. 450-454
[12] SHEU T L, LIN Y H. Cluster-based slot allocations for inter-vehicle communications in VANETs[A]. 2011 7th International Wireless Communications and Mobile Computing Conference (IWCMC)[C].2011.1500-1505.
[13] BENSLIMANE A, TALEB T, SIVARAJ R. Dynamic clustering-based adaptive mobile gateway management in integrated VANET— 3G heterogeneous wireless networks[J]. IEEE Journal on Communications, 2011, 29(3): 559-570.
[14] KOHONEN T. Self-Organization and Associative Memory[M]. 2nd Edition, Berlin: Springer-Verlag, 1987.
[15] BADEKAS E, PAPAMARKOS N. Document binarisation using kohonen SOM[J]. IET Image Processing, 2007, 1(1): 67-84.
[16] VENKATESH Y V, RAJA S K, RAMYA N. Multiple contour extraction from graylevel images using an artificial neural network[J]. IEEE Transactions on Image Processing, 2006, 15(4):892-899.
[17] DONG G, XIE M. Color clustering and learning for image segmentation based on neural networks[J]. IEEE Transactions on Neural Networks, 2005, 16(4): 925-936.
[18] HSU C. Generalizing self-organizing map for categorical data[J].IEEE Transactions on Neural Networks, 2006, 17(2): 294-304.
[19] BRUGGER D, BOGDAN M, ROSENSTIEL W. Automatic cluster detection in Kohonen’s SOM[J]. IEEE Transactions on Neural Networks, 2008, 19(3): 442-459.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創業家(2015年10期)2015-02-27 07:55:08