基于圖象模式的CCD視頻信息采集技術
2011-08-09 08:03:46王漢兵周永平陳世純
中國測試 2011年6期
王漢兵,黃 濤,雷 磊,周永平,陳世純
(1.武漢軍械士官學校,湖北 武漢 430075;2.總裝3303工廠,湖北 武漢 430200)
0 引 言
CCD觀測器能夠根據輻射源自動、實時地測量飛行器偏離瞄準線的角偏差,以串碼形式供給控制箱編制控制指令,它實質上是一個測量角偏差的精密光電系統。CCD觀測器的主要性能參數包括測角精度、抗干擾能力和電子學的靈敏度。為有效完成以上參數采集,應用計算機、虛擬儀器、自動化、數據庫等技術,設計了一套CCD觀測器自動測試系統。
該文側重對CCD觀測器的主要輸出信號即視頻信號的提取及關鍵軟硬件設計進行闡述,并給出測角精度、抗干擾能力和靈敏度的分析處理方法。
1 CCD觀測器功能原理
CCD觀測器是以單片機為核心的光機電系統,它的變焦光學系統接收彈尾輻射源能量,并分成主次2路,通過不同的濾光片后投射到各自的CCD攝像機靶面上,分別形成彈標和背景及干擾的全視頻信號。經過鉗位、放大后相減,再經窗口選通和比較,取出彈標信號,該信號輸送給測角電路,根據彈標信號在CCD攝像機靶面上的位置及光學系統的焦距,即可求出角偏差量。高低和俯仰方向的角偏差數字量通過單片機串口以一定傳輸方式傳輸到控制箱[1]。CCD觀測器的工作原理框圖如圖1所示。

圖1 CCD觀測器的工作原理框圖

表1 CCD觀測器主要技術性能

圖2 測試系統總體結構
CCD觀測器主要技術性能如表1所示。測角精度包括大視場精度和小視場精度,大視場精度指發射時間為3.8s時(相當于測量400m處),目標的精度指標;小視場精度是指發射時間為20s時(相當于測量3000m處),目標的精度指標。抗干擾能力是指CCD觀測器在最惡劣的外場環境下對最強干擾光源的不捕獲能力。靈敏度是指CCD觀測器的信號提取能力,能對真實目標進行可靠捕獲和精確跟蹤。
2 測試系統的方案設計
2.1 總體結構
CCD觀測器測試系統采用PXI總線模塊作為硬件開發平臺,系統框圖如圖2所示,包括UUT部分、適配部分和PXI總線部分。
可以看出,檢測觀測器需要施加的信號有DC信號、數字I/O信號、開關信號等,用來給照明燈、目標燈供電,模擬發射同步信號和自檢信號,控制CCD觀測器饋電,提供測試環境、測試條件和激勵等。觀測器響應的信號主要有DC信號、視頻信號、電阻信號、數字信號等,通過A/D采集或者數字萬用表測量,主控機獲取相關信號的數據。
2.2 測試原理
檢測觀測器時,需要給觀測器提供一個模擬輻射源,這個信號相對于觀測器來說是個無窮遠的信號,同時還需要模擬實際背景。通過觀看觀測器的視頻輸出,可以對觀測器做一個定性的或定量的判斷。

圖3 平行光管
為此,建立一套室內光學模擬系統,包括照明系統、平行光管、調整機構、底座等。該系統通過鹵素燈照明,經過聚光鏡和四方棱鏡,使得平行光管周圍4個區域光強均勻分布,同時在平行光管的出口處安裝4只光敏三極管,檢測光的強弱和分布情況。在平行光管的焦平面上設置測精度分劃板、測抗干擾分劃板和測靈敏度分劃板3種分劃板,以及相對應的3種中性濾波片,分別提供檢測3個性能參數所需的適當背景、目標和測試條件,還安裝磷砷化鎵小燈泡來模擬真實目標。調整機構用來做高低和方位2個方向的調整,以便被測CCD觀測器對準平行光管,并瞄準相應的分劃板。測試系統采用了平行光管作為室內光學模擬系統,為測試系統提供目標、干擾目標和背景。平行光管的外觀如圖3所示。
3 測試系統適配電路設計
3.1 串口匹配與通信電路設計
觀測器的角偏差是觀測器測試的最重要部分。角偏差反映了觀測器的精度特性,是對觀測器定量測試的重要指標。
在進行精度測試時,CCD觀測器內部8098單片機以特定波特率按固定的串行通信方式輸出在水平和俯仰2個方向上的角偏差(觀測器每40ms發一楨角偏差數據,每楨11個字節,波特率為93.75KB),主控計算機RS232串口接收并解算出其數值。
單片機與主控機實現通信,需要滿足2個條件:(1)電平匹配;(2)波特率匹配[2]。這里,使用 MAX232芯片進行TTL電平與RS232電平轉換。CCD觀測器的串口波特率是93.75 KB,是由其內部單片機的晶振頻率和分頻器數值決定,作為裝備這一數值是不能改變的,而主控機的串口波特率也是一些特定的離散值,沒有93.75KB的波特率。因此,觀測器與主控機的直接通信將變得不可能。
為此,在適配電路中設計了一個由51單片機作為過渡的波特率轉換電路。選擇合適的晶振和設定適當的分頻器值,以93.75 KB波特率接收來自CCD觀測器的串碼。經過適當裁剪處理,通過信號切換電路,再以2400B波特率發送給主控機串口,實現對有效角偏差數據地實時獲取。由于單片機的串口需要分別與武器裝備和主控機進行通信,特別是在接收觀測器角偏差的時候,單片機首先要在方式二的工作方式下[3],使用93.75 KB的波特率接收觀測器角偏差,完成單片機與觀測器串行通信,角偏差存入單片機的RAM中;然后將單片機的工作方式設為方式一,波特率設為2 400 B,完成單片機與主控機的串行通行,單片機RAM中的角偏差送入主控機。串口匹配與通信原理框圖如圖4所示。
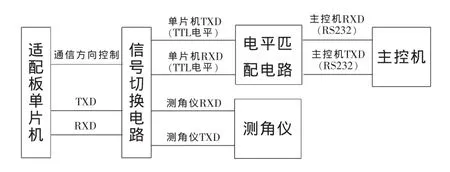
圖4 串口匹配與通信原理框圖
3.2 平行光管出口光強控制電路設計
在進行CCD觀測器精度、抗干擾性和靈敏度測試時,都需要一個合乎要求的背景,即通過閉環控制平行光管出口的光強大小和分布情況來實現。平行光管出口光強的閉環控制如圖5所示。出口光強由安裝在出口處上下左右的4個光敏三極管來敏感,將光強轉換為直流電壓信號,經過濾波、放大由A/D采樣,送入主控計算機進行邏輯判斷,通過虛擬面板上的4個綠色指示燈和4個紅色指示燈來顯示。當電壓小于0.4V時,綠燈不亮表示背景光太弱;當電壓在0.4~0.6 V之間時,綠燈點亮表示背景光適合;當電壓大于0.6V時,紅綠燈都點亮表示背景光太強;如果4個綠燈同時點亮或熄滅,說明出口光強是均勻的。電壓值的或大或小,通過適當的函數關系控制D/A模塊的模擬電壓輸出大小,控制照明供電電路輸出一定功率的電壓提供給照明鹵素燈,從而實現對出口光強的閉環控制,滿足CCD觀測器的測試條件。
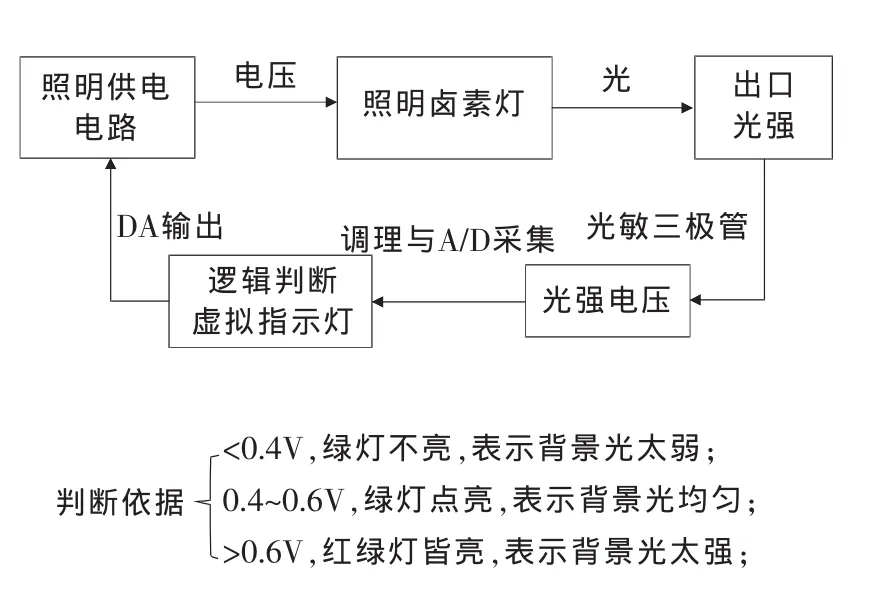
圖5 平行光管出口光強閉環控制
3.3 背景電平和目標電平的控制
在進行抗干擾性和靈敏度測試時,對背景電平和目標電平都有著明確的定量要求,以便于CCD觀測器性能測試[4]。背景電平和目標電平大小的閉環控制如圖6所示。對CCD觀測器輸出的視頻信號進行高速A/D采樣,獲取其中背景電平和目標電平的大小,依據測試要求進行判斷。通過相應的函數關系控制D/A模塊的2路模擬電壓輸出大小,分別控制照明燈和目標燈的供電電壓,使其達到合適的亮度,再由CCD觀測器拾取輸出視頻信號,最終經過反復調整,使其背景電平和目標電平滿足測試要求[5]。加有目標的視頻信號波形如圖7所示。
3.4 視頻處理電路
為了監視CCD觀測器在測試過程中對目標的捕獲情況,需要實時顯示帶有目標的視頻圖像。由于CCD觀測器工作時自動輸出2路全視頻信號,為此,在A路視頻信號中混疊選通窗口信號和目標加亮信號再經過驅動電路,而B路視頻信號僅經過驅動。2路視頻信號經過單刀雙擲繼電器的切換,由視頻采集模塊捕獲視頻圖像并顯示出來,便于人們觀察比較[6]。

圖6 背景電平與目標電平閉環控制

圖7 加有目標的視頻信號波形
4 軟件實現
4.1 測角精度
4.1.1 主控機軟件流程
在精度測試時,主控機軟件需要完成以下5項任務:
(1)完成進行精度測試的條件設置,包括提示測試人員將大平行光管打到精度測試檔和調節大平行光管的背景燈亮度;
(2)打開A路視頻監控,將觀測器設置為測角精度測試狀態;
(3)打開主控機串口,設置波特率;
(4)完成角偏差的接收;
(5)測試12次后,計算測角精度、變焦起止時間。主控機串行通信軟件流程圖如圖8所示。
4.1.2 測角精度的計算
主控機接收到的角偏差,已經經過適配板單片機軟件的處理。每一幀數據有5個字節,前2位是Y方向角偏差,第3、4位是X方向角偏差,第5位是變焦齒數。
由于CCD觀測器精度指標包括大視場精度和小視場精度,因此在計算精度時,分別取發射時間為3.8 s和20 s時的角偏差數據計算。由于觀測器每0.04s發一幀角偏差數據,所以大小視場時刻可以據此確定。經計算,大視場取第95幀數據,小視場取第500幀數據。
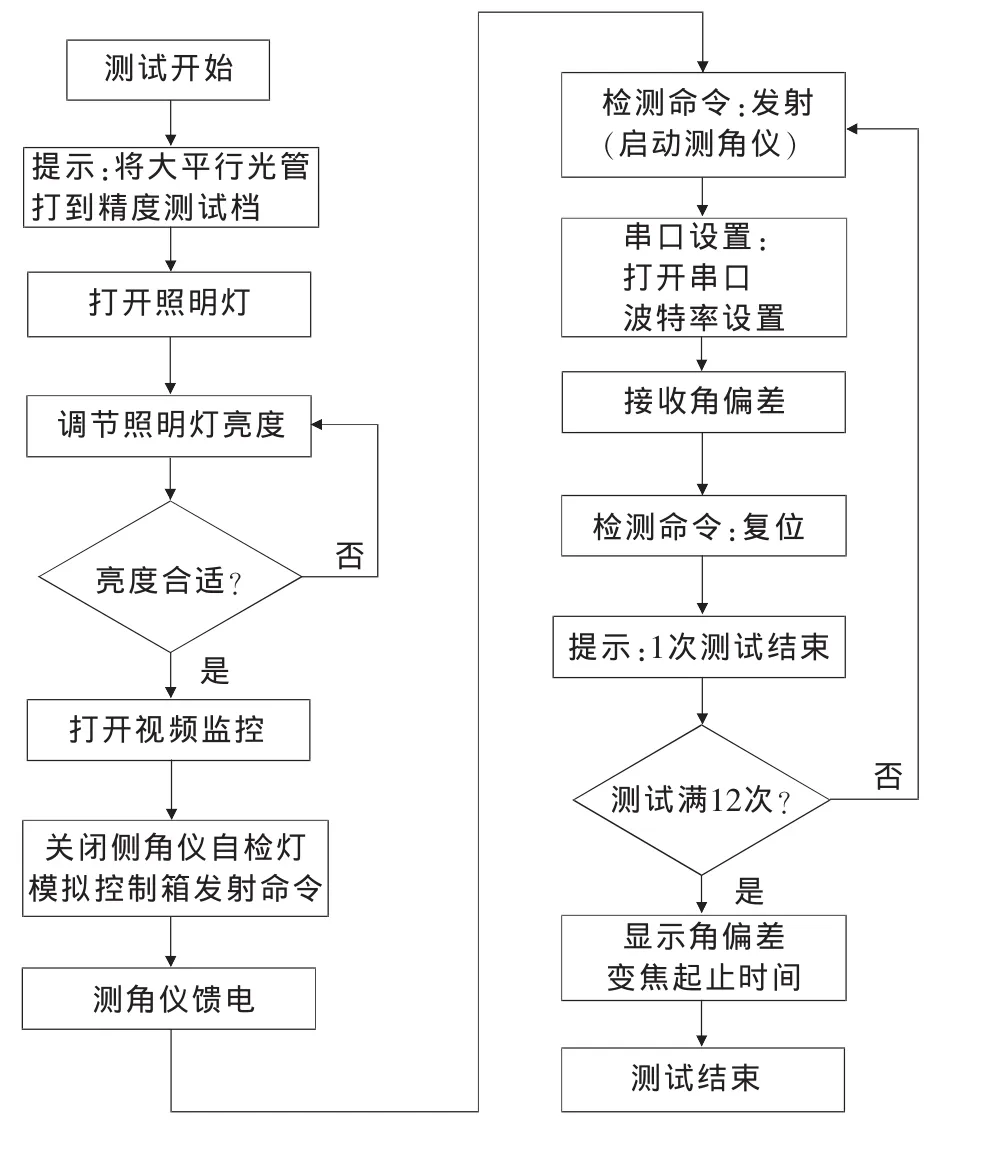
圖8 測試軟件流程圖
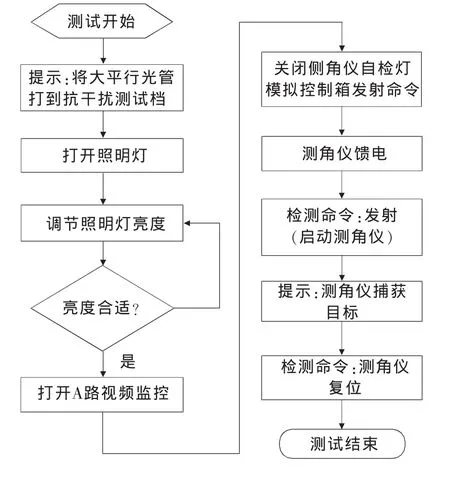
圖9 測試軟件流程
為了準確地評估CCD觀測器的精度,總共進行12次測量,以它們的均方根值作為精度的測量值。CCD觀測器的精度均方根計算公式為

式中:σ——均方根;
xi——水平方向角偏差;
yi——俯仰方向角偏差;
n——測量次數[7],此處n=12。
4.1.3 精度測試的視頻顯示
測試系統集成了視頻采集模塊,用于顯示觀測器捕獲目標的情況。正常情況下,當變焦時間小于3.8s時,目標應被捕獲,并且目標的兩側各有一條加亮線。
4.2 抗干擾性能
抗干擾檢測的軟件流程圖見圖9。如果調整觀測器使干擾目標在全視場內移動,CCD觀測器都不捕獲干擾目標,則說明其抗干擾性能合格。
5 結束語
該文介紹了CCD觀測器的組成及工作原理,并以此為依據,詳細介紹了CCD觀測器視頻采集系統的整體設計方案及系統的軟硬件設計,對觀測器輸出的重要信號給出了分析處理方法。系統測試界面友好,功能齊全,分析直觀,具有良好的開發拓展功能。
[1] 張建虎.AFT07A/B反坦克導彈技術勤務教程[M].北京:國防工業出版社,2003.
[2] 楊樂平,李海濤.虛擬儀器技術概論[M].北京:電子工業出版社,2003.
[3] 蔣鵬,潘孟春,祖先鋒,等.一種新型的反坦克導彈制導控制系統性能動態測試方法[J],彈箭與制導學報,2005,25(4):339-341.
[4] 黃濤,潘孟春,祖先鋒.基于PXI總線的戰術導彈裝備自動測試系統設計[J].航空兵器,2005(4):52-56.
[5] 王漢兵,黃濤,張建虎.基于PXI總線的動態測控系統設計[J].戰術導彈控制技術,2006(3):80-85.
[6] 王艷武.CCD輸出信號處理的研究[J].物流工程與管理,2010(9):143-144.
[7] 白釗,白波,周麗華,等.CCD攝像機照度檢測裝置的研制[J].應用光學,2010,31(5):772-776.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00