和諧號動車組制動防滑控制理論和試驗
2011-08-03 11:55:00王新海曹宏發(fā)韓曉輝
鐵道機車車輛 2011年5期
關(guān)鍵詞:檢測
陳 偉,周 軍,王新海,曹宏發(fā),韓曉輝
(中國鐵道科學研究院 機車車輛研究所,北京100081)
和諧號動車組的制動以黏著制動為主,而對于黏著制動而言,在制動過程中會不可避免的帶來車輪滑行的問題。隨著車輛速度的提高,輪軌間的黏著系數(shù)降低,車輪滑行幾率增大。滑行就是由于車輪被“抱死”而導致轉(zhuǎn)動速度急劇減小的現(xiàn)象,輪軌之間的滑動會延長制動距離并使踏面擦傷。這不僅降低乘車的舒適性,也會給轉(zhuǎn)向架部件帶來附加的沖擊力,縮短其壽命,甚至危及行車安全。因此,必須防止滑行現(xiàn)象的發(fā)生。
縮短制動距離與車輪防滑是一對矛盾,對于列車黏著制動方式來說,欲縮短制動距離,又不發(fā)生滑行,必須采取如下措施:
(1)實行減速度控制,充分利用黏著
和諧號動車組可按列車速度分級來控制列車減速度,使之與黏著系數(shù)變化曲線趨勢相接近,達到不滑行而制動距離又短的目的。同時,也應考慮空電復合制動時電制動力(簡稱電制力)的發(fā)揮,優(yōu)先使用電制力。
(2)采用高性能的防滑裝置
傳統(tǒng)的防滑裝置是在車輪發(fā)生滑行瞬間,防滑裝置使制動力全部或部分緩解,隔一段時間再恢復制動力。這種防滑裝置的作用導致制動距離延長,黏著損失大。隨著計算機技術(shù)的發(fā)展,新型高性能防滑裝置能做到極為快速靈敏的階段緩解及再制動,能使制動時輪軌保持在最佳蠕滑狀態(tài),充分利用黏著,基本不延長制動距離。而且,在防滑的同時還可以進行撒沙,進一步提高了黏著系數(shù)的利用值。
主要介紹和分析了和諧號動車組制動防滑理論,主要內(nèi)容包括:防滑控制中的主動防滑和被動防滑策略,制動防滑控制系統(tǒng)基本理論,制動防滑系統(tǒng)的硬件組成,滑行檢測方法,防滑控制方法等。最后,線路防滑試驗的結(jié)果也驗證了和諧號動車組防滑控制方法和制動防滑系統(tǒng)軟硬件的有效性和可靠性。
1 制動防滑系統(tǒng)控制方法
制動防滑控制方法從技術(shù)實現(xiàn)上可以分為主動防滑控制和被動防滑控制,前者的含義是在設(shè)計時通過列車相關(guān)參數(shù)的調(diào)整避免制動過程中滑行現(xiàn)象的發(fā)生,后者則是在運行過程中出現(xiàn)滑行后,通過制動力控制達到黏著恢復、控制滑行的目的。
1.1 主動防滑控制
主動防滑技術(shù)主要考慮兩方面問題,一個是防止制動力過大,另一個是黏著系數(shù)隨速度和輪軌條件等因素的改變。主要解決的辦法包括減速度控制技術(shù),輪軌間增黏技術(shù)等
(1)減速度控制
黏著系數(shù)受列車運行速度、氣候、輪軌表面狀態(tài)的影響,其中列車速度的影響是可以預知的,并有理論黏著系數(shù)給出。采用減速度控制技術(shù)時,列車設(shè)計制動力是不超過設(shè)計黏著限制的,如圖1所示。合理的分配制動力,是能夠保證正常情況下制動力不超過黏著限制的。
(2)增黏技術(shù)
制動控制系統(tǒng)中可以設(shè)置清掃模式,踏面清掃是雨雪冰凍天氣時改善黏著的有效辦法,司機連續(xù)實施短時摩擦制動,通過熱量使附于踏面的冰融化,同時對踏面進行清理,增加黏著。另外,對于制動系統(tǒng),目前采用的較多的是撒沙增黏,研究表明,輪軌表面粗糙度可以破壞輪軌之間的水膜或油膜,從而改善黏著。由于動車組的頭車是動車且動車的制動力大于拖車制動力,因此僅動車配有撒沙裝置。如圖2所示,撒沙控制系統(tǒng)根據(jù)列車運行方向來控制不同的撒沙裝置工作,即當動車組向左運行時,藍色箭頭指示的撒沙裝置起作用;當動車組向右運行時,黃色箭頭指示的撒沙裝置起作用。
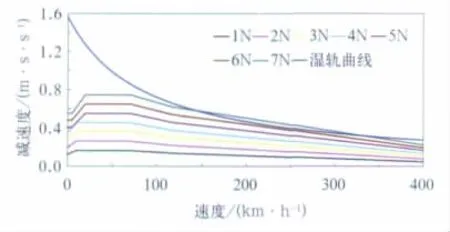
圖1 減速度—速度曲線
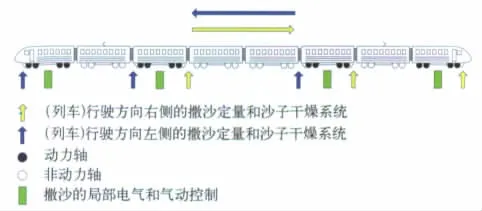
圖2 撒沙增黏
1.2 被動防滑控制
對于和諧號高速動車組的制動防滑控制系統(tǒng)而言,主要是解決被動防滑控制技術(shù)問題。被動防滑控制方法是利用防滑控制系統(tǒng)來改善列車運行時的輪軌狀態(tài)。當防滑控制系統(tǒng)檢測到滑行后,按照緩解、保壓和再制動3種模式進行精確的控制。在滑行中即使制動力降低,因為己經(jīng)利用到宏觀滑動領(lǐng)域內(nèi)的黏著力極限,所以列車的制動力并沒有損失。理想的情況是能在車輪的再黏著點使制動力矩上升,但在實際控制過程中采用根據(jù)制動力和黏著力的關(guān)系來確定再黏著點的控制方式以及制動力的滯后性,所以在理想點讓制動力上升是很困難的。但是為了防止制動距離的延長應盡可能采用減少制動力損失的防滑控制方法。
2 制動防滑控制系統(tǒng)的硬件組成
制動防滑控制系統(tǒng)的功能就是通過各車軸中安裝的速度傳感器,對速度進行檢測,在滑行即將發(fā)生的短暫過渡階段將其檢測出,并及時動作,使作用在車輪上的制動力迅速降低至黏著力以下,以防止車輪滑行,恢復輪軌的黏著狀態(tài)。在黏著恢復以后,還要使制動力及時上升,并使其恢復到設(shè)定值。
制動防滑系統(tǒng)的硬件主要由集成在制動控制單元中的防滑控制模塊、4個軸速度傳感器及連接至每個軸的制動缸管路上的防滑排風閥組成,如圖3所示。同時,需要對制動防滑控制系統(tǒng)完成在線測量、標定和系統(tǒng)診斷、狀態(tài)顯示等,并可以對外輸出其它系統(tǒng)所需要的各種形式的參考速度信號。

圖3 制動防滑系統(tǒng)的硬件組成
2.1 速度傳感器
速度傳感器的輸出是防滑控制中速度計算的基礎(chǔ),其精度非常重要。動車組動車的速度傳感器常安裝在主電機軸端,拖車則安裝在車軸端部。主電機軸端安裝有感應齒盤,在主電機軸轉(zhuǎn)動時產(chǎn)生感應電壓。因為主電機軸通過小齒輪和大齒輪與車輪相連,所以感應出的脈沖頻率與感應齒盤的齒數(shù)、大/小齒輪的齒數(shù)比、車輪轉(zhuǎn)動速度(列車速度)成比例。因此,根據(jù)感應齒盤的齒數(shù)、齒輪的齒數(shù)和車輪直徑,就可計算出車輪的轉(zhuǎn)動線速度。
本系統(tǒng)所采用的速度傳感器將車軸速度按一定函數(shù)關(guān)系轉(zhuǎn)變?yōu)轭l率信號,作為微處理器控制單元的信號輸入。這些頻率信號與軸速度的函數(shù)關(guān)系如下:

式中:f為頻率(Hz);va為軸速度(km/h);Z為測速齒盤上的齒數(shù);D為輪徑(m)。
2.2 防滑電磁閥
防滑電磁閥由起轉(zhuǎn)換閥作用的本體和電磁閥構(gòu)成,如圖4,邏輯上可分為排風閥和保壓閥,它安裝在制動力傳輸路徑上。當處于制動狀態(tài)時,中繼閥輸出的壓縮空氣經(jīng)管路和防滑閥傳遞至制動缸,防滑閥的3種動作狀態(tài)對應了壓縮空氣傳輸?shù)?種路徑。
(1)正常制動狀態(tài):防滑閥處于失電狀態(tài),排風閥和保壓閥均不動作,壓縮空氣直接傳至制動缸;
(2)保壓狀態(tài):排風閥失電不動作;保壓閥得電動作,切斷壓縮空氣路徑,處于不充不排的狀態(tài),制動缸的壓力不變。
(3)排風狀態(tài):防滑閥處于得電狀態(tài),排風閥和保壓閥均動作,一方面壓縮空氣無法從中繼閥傳給制動缸,另一方面制動缸里的空氣通過排風閥排出,故此時制動缸壓力降低。
簡單的說,當中繼閥輸出的空氣壓力上升后,如果從滑行檢測器發(fā)出的防滑控制指令使電磁閥勵磁,防滑電磁閥就會在切斷中繼閥與制動缸之間通路的同時,構(gòu)成制動缸與排風閥的通路,使制動缸的壓力降低,使制動呈緩解狀態(tài)。滑行時的制動動作流程如圖5所示。
由于需要根據(jù)當前的輪軌關(guān)系進行精確的黏著控制,因此在防滑控制中也引入PWM概念,通過階段保壓和階段排風控制,對處于特定防滑控制階段的制動力進行微調(diào)。

圖4 防滑電磁閥
2.3 防滑控制器
車輪防滑控制板安裝在基于微處理器的制動控制單元中。制動控制單元檢測每個軸的速度并根據(jù)輪軌之間的可用黏著激活防滑閥進而控制制動缸壓力。微處理器控制邏輯包括一個故障診斷和故障顯示,以方便維護和操作。當檢測到輪對打滑時,電子控制單元通過控制防滑閥的電磁鐵,緩解、保持、實施制動。在實施緊急制動時,防滑保護設(shè)備仍然可以運行。
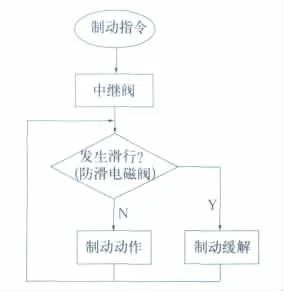
圖5 滑行控制制動動作流程圖
3 動車組制動防滑控制原理
3.1 滑行檢測方法
由滑行檢測器對速度傳感器送來的脈沖頻率信號進行計算比較,并根據(jù)事先規(guī)定的控制邏輯來判斷是否發(fā)生了滑行。目前,已有的防滑器在判斷“滑行”時,采用了許多判據(jù),主要依據(jù)的是速度差、減速度、滑移率和減速度微分等,其中速度差和減速度采用的較為普遍。防滑器根據(jù)速度差、減速度等的變化,相應地控制制動力變化,以避免車輪滑行。但無論采用哪一種判據(jù),都應把防滑與充分利用黏著作為主要目的。有時雖然兩種防滑器采用相同的判據(jù),但效果卻不同,這主要是由于判據(jù)參數(shù)的選取和對制動力的控制過程不同造成的。
本文采用的滑行檢測方法主要有減速度檢測和速度差檢測兩種。
(1)減速度檢測
減速度檢測是根據(jù)車輪本身轉(zhuǎn)動速度減少的比例來判斷是否滑行。一般來說,減速度檢測可以對滑行軸單獨進行評價,它可以及時檢測到滑行。由于輪對與車輛的質(zhì)量相差較大,輪對速度變化相對也快一些,所以應優(yōu)先使用減速度檢測。特別是由摩擦制動造成滑行時,由于車輪的圓周速度減小,閘片的摩擦系數(shù)增加,導致車輪的減速度進一步加大,此時的滑行可以用減速度檢測的方法有效地檢測出來。
(2)速度差檢測
速度差檢測是以同一輛車內(nèi)4個軸的速度,以及制動指令發(fā)出后以一定減速度減速的假想軸 (也稱第5軸速度)中的最高速度軸為基準。當車輪的速度比基準軸的速度低于某一值(設(shè)定值)時,就判斷為滑行。但是,在施加的制動力略大于輪軌間的黏著力時,也有因減速度檢測靈敏度不足,發(fā)生連續(xù)滑行,甚至抱死的情況。特別是在所有軸同時滑行時,用速度差是無法判斷的,必須用減速度判斷。
因此,我們的防滑系統(tǒng)在滑行檢測時,以減速度檢測方法為主,并和作為后備的速度差檢測方法一起使用。根據(jù)減速度檢測或速度差檢測標準判斷發(fā)生滑行時,防滑電磁閥勵磁,將制動缸壓力降低。制動缸空氣壓力降低后,在輪軌間黏著力的作用下車輪轉(zhuǎn)速上升。當與基準軸的轉(zhuǎn)速差降到設(shè)定值以內(nèi)時,滑行檢測器就會判斷為已經(jīng)恢復了黏著,防滑電磁閥使制動缸壓力再次上升。
防滑器進行防滑控制一般采用3個過程,即對制動缸壓力進行減壓、保壓和增壓。制動缸開始減壓、保壓、增壓時,其速度差值的確定對黏著利用是至關(guān)重要的。滑行的壓力控制是:檢測到滑行后,為迅速降低制動缸壓力,將防滑電磁閥勵磁,使制動缸內(nèi)的壓力迅速排出。
隨著微型計算機技術(shù)的發(fā)展,防滑器進入了微機控制階段。微機控制的防滑器可對制動、即將滑行、緩解、再黏著的全過程進行動態(tài)檢測與控制,信息采用脈沖處理,簡單可靠,無零點漂移,故無需調(diào)節(jié)和補償。更重要的是微處理器(MPU)的處理速度極快,可大大提高檢測精度,即使微小而緩慢的滑行也能及早檢測出來并采取措施加以防止。微機控制的防滑器還有一個突出的優(yōu)點,即它可以利用軟件隨時提供有關(guān)信息,進行自我檢查、診斷和監(jiān)督,必要時可對有關(guān)信息隨時進行存儲、調(diào)用和顯示;它還能根據(jù)不同的運行環(huán)境和要求很方便地改變控制判據(jù)而不必改動軟件。微機滑行檢測器的控制框圖如圖6。

圖6 微機滑行檢測器控制邏輯圖
3.2 制動防滑系統(tǒng)控制準則
(1)基準列車速度計算
當軸減速度小于臨界滑行值時,以最高的軸速度作為列車速度;當軸減速度大于臨界滑行值時,按臨界滑行的減速度基準計算列車速度。
(2)減速度準則防滑控制
某軸的減速度超出預定基準值時,防滑系統(tǒng)判定該軸發(fā)生了制動滑行并控制該軸的防滑排風閥的快速或階段性排風,以減小滑行軸上的空氣制動力。當黏著恢復使該軸的減速度恢復到某一預定值時,防滑系統(tǒng)控制該軸的防滑排風閥充風,以恢復該軸上的空氣制動力。
(3)速度差準則防滑控制
如果某軸的速度與基準速度間的速度差超過某一預定值,防滑系統(tǒng)判定該軸發(fā)生了制動滑行并控制該軸的防滑排風閥的快速或階段性排風,以減小滑行軸上的空氣制動力。當黏著恢復使該軸的速度恢復到某一預定值時,防滑系統(tǒng)控制防滑排風閥對該軸的制動缸實施保壓,以保持該軸制動力。當黏著恢復使該軸開始加速或該軸速度與基準速度的差值減小到某一預定值時,防滑系統(tǒng)控制該軸的防滑排風閥充風,以恢復該軸上的空氣制動力。
(4)空電混合制動防滑控制
在空電混合制動時,動車上一般有電制動和空氣制動,所以動車的防滑主要是電制動防滑和空氣制動防滑。當電制動因滑行保護使實際電制動力降低時,TCU通過本地單元向制動系統(tǒng)發(fā)送電制動滑行保護動作信號,不會因?qū)嶋H電制動力下降而在動車軸上補充空氣,以利于動車軸的黏著恢復,防止因補充空氣制動使制動滑行加重。但電制動連續(xù)降低長于5s時,則將切除電制動而投入空氣制動,以保證制動距離和防止輪對擦傷。
在空電混合制動時拖車軸上沒有電制動,所以當拖車軸有空氣制動時,仍可以正常的空氣制動方式進行防滑控制。
4 試驗結(jié)果及分析
按照第2節(jié)提出的制動防滑控制策略,對和諧號CRH3動車組進行了防滑試驗,包括初速300km/h下的8級空電復合制動,初速250km/h下的8級復合制動,初速250km/h下的8級純空氣制動以及初速300 km/h下的純空氣緊急制動4種情況的試驗,并對防滑效率進行了分析,驗證了提出的防滑控制系統(tǒng)的有效性和可靠性。
4.1 CRH3動車組防滑試驗
(1)初速300km/h下的8級空電復合制動
在150km/h以下速度區(qū)間出現(xiàn)滑行現(xiàn)象但防滑閥未動作,如圖7。
(2)初速250km/h下的8級純復合制動
在200km/h以下的速度區(qū)間出現(xiàn)滑行現(xiàn)象且防滑閥動作,如圖8。
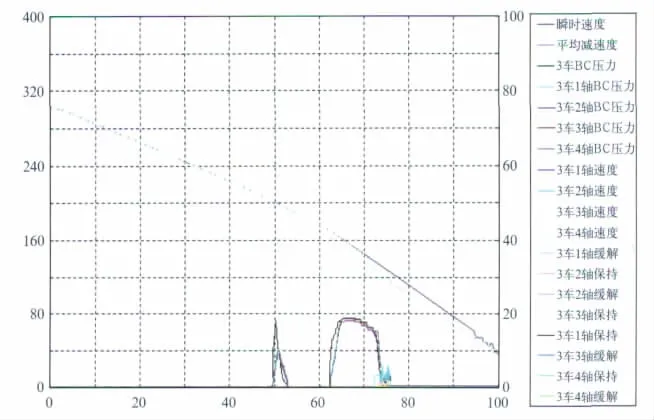
圖7 初速300km/h下的8級空電復合制動防滑試驗結(jié)果

圖8 初速250km/h下的8級復合氣制動防滑試驗結(jié)果
(3)初速250km/h下的8級純空氣制動
在173~16km/h速度區(qū)間出現(xiàn)滑行現(xiàn)象且防滑閥動作,如圖9。
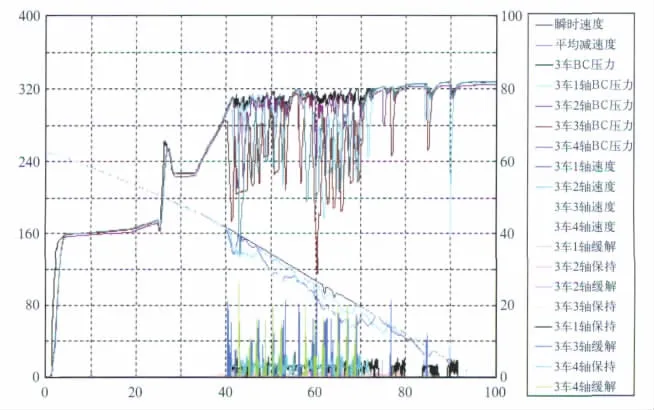
圖9 初速250km/h下的8級純空氣制動防滑試驗結(jié)果
(4)初速300km/h下的純空氣緊急制動
在200km/h以下的速度區(qū)間滑行現(xiàn)象持續(xù)出現(xiàn)且防滑閥有明顯的排風動作,如圖10。
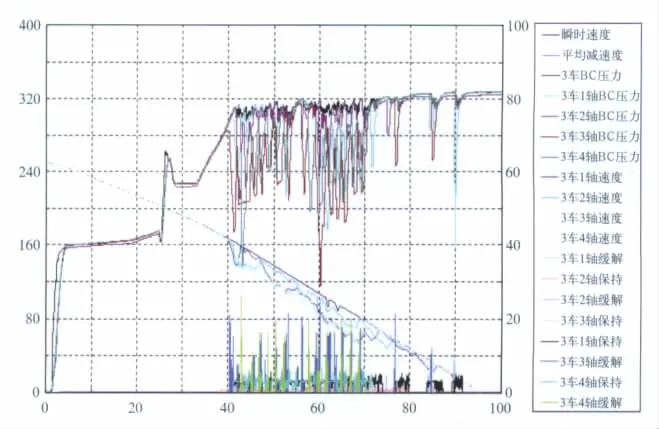
圖10 初速300km/h下的緊急純空氣制動防滑試驗結(jié)果
4.2 防滑試驗數(shù)據(jù)分析
(1)防滑效率的計算方法
車輪滑行控制效率定義:測量的制動距離與理想的制動距離之間的關(guān)系,如圖11。
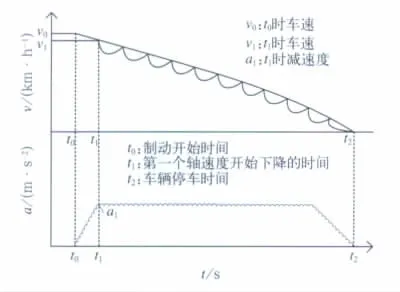
圖11 測量的制動距離與理想的制動距離之間的關(guān)系

Sfictitious:根據(jù)第一個車軸速度開始下降時的初速度和初始減速度計算而得;
Smeusured:從第一個車輪速度開始下降直到停車所測的距離;
(2)低速出現(xiàn)滑行的原因分析
以上4次防滑試驗中,滑行工況均在低減速區(qū)域出現(xiàn),原因可能有以下幾種:
①高減速度區(qū)域,減磨液因為空氣動力學的影響很難均勻、直接噴灑軌面上;
②制動控制采用了分階控制的方法,高減速度區(qū)域的制動力明顯小于低減速度區(qū)域,主動的降低了黏著利用。
(3)防滑效率的分析
基于以下兩點,對純空氣緊急制動進行防滑效率分析:
①緊急制動時的制動力是恒定的;
②純空氣制動時沒有電制動力的參與,更有利于分析制動系統(tǒng)的防滑特性。
將純空氣緊急制動時的相關(guān)參數(shù)代入公式(2)后,可以得出:η≈105%。但是此數(shù)值偏小,一方面可能減磨液的濃度不夠,另一方面也說明單車噴灑減磨液的方式對于列車中的其它車輛影響很小。
(4)利用黏著系數(shù)的計算
根據(jù)下列公式進行黏著利用系數(shù)的計算:
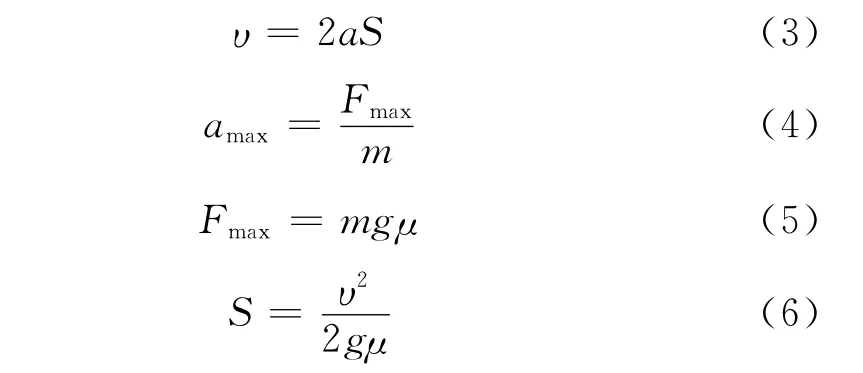
將純空氣緊急制動時的相關(guān)參數(shù)代入公式(2)后,可以得出:
低減速區(qū)域非滑行點制動黏著利用系數(shù):μ≈0.11。
滑行最嚴重點的黏著利用系數(shù):μ≈0.05。
(5)參考速度的評估
在4次防滑試驗中,全軸滑行時參考速度大于車輛75%,滿足UIC標準要求。
(6)車輪沒有抱死現(xiàn)象發(fā)生
(7)車輪沒有擦傷現(xiàn)象出現(xiàn)
(8)最嚴重滑行軸的最嚴重滑行點的評估
通過分析4次防滑試驗中的數(shù)據(jù),最嚴重滑行時軸速不低于參考速度+5km/h的20%,并且未超過3s,滿足相關(guān)技術(shù)標準的要求,如圖12。
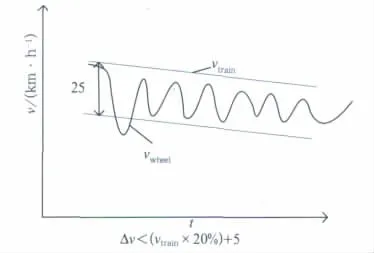
圖12 最嚴重滑行軸的最嚴重滑行點的評估
5 結(jié)論
防滑控制系統(tǒng)是高速列車制動系統(tǒng)的核心技術(shù)之一。在列車制動過程中,列車防滑系統(tǒng)既要實現(xiàn)良好的滑行控制,又要充分利用輪軌之間的黏著作用力。本文以和諧號CRH3動車組為研究對象,根據(jù)相應的制動防滑系統(tǒng)的方法及原理,設(shè)計了該高速動車組的制動防滑系統(tǒng)。針對4種不同的制動方式,進行了試驗測試,并分析了其防滑效率,驗證了和諧號動車組制動防滑控制策略的有效性和可靠性。
[1]李益民,張 維.動車組制動系統(tǒng)[M].成都:西安交通大學出版社,2008.
[2]李培曙.防滑器的防滑作用與黏著利用[J].鐵道車輛,1998,36(3):17-19.
[3]任大慶,陳 寧.德國Knorr公司的 MGS1微機控制防滑器[J].國外鐵道車輛,2004,41(3):26-29.
[4]左建勇,任利慧,吳萌嶺.鐵道車輛制動系統(tǒng)防滑控制仿真與試驗研究[J].同濟大學學報(自然科學版),2010,38(6):912-916.
[5]Zuo Jiangyong,Wu Mengling.Research on anti-sliding control of railway brake system based on adhesion-creep theory.Proceedings of the 2010IEEE International Conference on Mechatronics and Automation,August 4-7,2010,Xi'an,China,1 690-1 694.
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:36
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:34
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:50
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:48
