基于當前統計模型的三維空間機動目標跟蹤算法
2011-07-11 09:39:54田子希張寶宇
艦船科學技術 2011年12期
關鍵詞:模型
姜 偉,田子希,張寶宇
(海軍工程大學電子工程學院,湖北 武漢 430033)
基于當前統計模型的三維空間機動目標跟蹤算法
姜 偉,田子希,張寶宇
(海軍工程大學電子工程學院,湖北 武漢 430033)
對可以觀測距變率和角變率的雷達觀測系統提出了在三維空間中引入距變率(徑向速度)和角變率(角速度)的當前統計卡爾曼濾波算法。針對三維空間中的機動目標,將新提出的算法和傳統算法進行仿真,結果表明,當引入距變率和角變率時,其收斂速度加快,收斂精度提高,改善了跟蹤性能,具有工程實踐指導意義。
目標跟蹤;當前統計;距變率(徑向速度);角變率(角速度)
0 引言
在機動目標跟蹤中,建立符合實際的目標運動模型一直是人們關注的重點。在過去的30年中,已提出過各種關于目標運動的數學模型。在已有的動態模型中,周宏仁提出的當前統計模型較為典型,適用于線性系統中每1種具體的戰術場合和目標機動的當前狀況,能直接正確地估計出機動目標的當前狀態,不存在任何估計滯后與修正問題[1]。它使得對于目標跟蹤的精度和性能得到較大的提高,是公認的比較切合實際的1種運動模型,得到了廣泛的應用[2]。實際應用中證明這種對于目標機動狀況的描述較為合理。但該算法一方面依賴于模型自身的2個參數,即加速度極限值和機動頻率,當二者取值過大,則跟蹤勻速運動或者不具有較大機動加速度目標時其性能較差;取值較小時,則跟蹤突發強機動目標時其收斂速度較慢,算法的實時性降低,并且一旦目標機動超過預先設定的值,其跟蹤性能將明顯惡化。另一方面,當前統計模型是建立在卡爾曼濾波(KF)或擴展卡爾曼濾波(EKF)理論基礎上的,該理論基礎存在一些不足,使得當前統計模型及其自適應跟蹤算法很難對突發機動目標進行有效跟蹤[3]。
針對現代觀測雷達已經可以輸出目標運動的距變率(徑向速度)信息,并且可以由陀螺儀獲得目標運動的角變率(角速度)信息的情況,可以利用距變率和角變率信息更為精確地估計航跡參數,提高跟蹤精度。為了解決上述問題,本文擬將目標運動的速率信息引入當前統計算法,使當前統計模型能對三維空間下的運動目標進行更為精確的跟蹤。為達成此目的,需要將一維CS跟蹤模型擴展至三維。本文使用一維CS模型分別對目標在直角坐標系3個坐標軸上的運動狀態進行跟蹤,然后對3個跟蹤結果進行空間合成。下面主要介紹x軸的一維CS模型。
1 模型建立
1.1 轉換坐標卡爾曼濾波(CMKF)
本文采用極坐標系下的量測模型和直角坐標系下的狀態模型進行目標跟蹤理論的研究。以我艦觀測雷達為原點建立空間直角坐標系,則目標在直角坐標系內的運動情況如圖1所示。
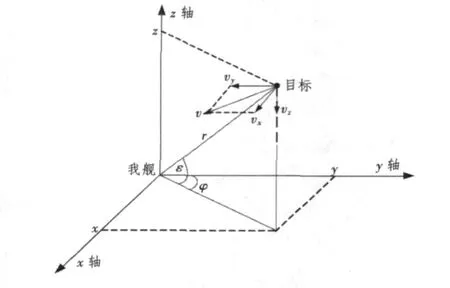
圖1 火控濾波直角坐標系及目標運動情況Fig.1 Cartesian coordinates and target movement
參照圖1,假設目標在水平面內做勻速直線運動,r,φ,ε是觀測雷達輸出的斜距、方位角、俯仰角信息,則r,φ,ε是上述信息的變化率。設斜距、方位角、俯仰角的隨機觀測誤差均方差分別為σr,σφ和σε,同時忽略系統誤差。
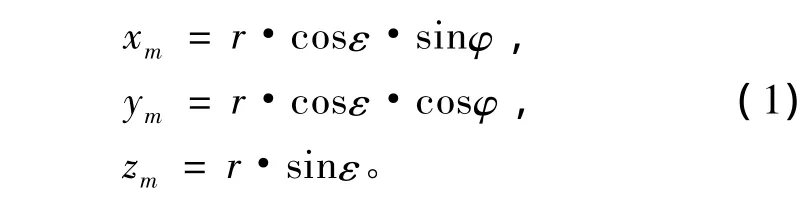
假設初始速度和位置為0,極坐標系與直角坐標系之間的關系如下:
1)狀態方程
當目標正以某一加速度機動時[4-5],下一時刻的加速度取值是有限的,且只能在“當前”加速度的領域內。為此,周宏仁提出機動目標“當前”統計模型。該模型的本質是非零均值時間相關模型,加速度的“當前”由概率密度修正的瑞利分布來描述,均值為“當前”加速度預測值,隨機加速度在時間軸上符合一階時間相關過程,由于該模型采用非零均值和修正瑞利分布來表示機動加速度特性,因而更加符合實際。與傳統的Singer模型相比,它能更為真實地反映目標機動范圍的強度變化。

若令a1(t)=a—(t)+a(t),并代入式(2)和式(3),得到:

將式(4)和式(5)寫成狀態方程,即為機動目標“當前”統計模型。
設目標運動狀態方程為[6]:

式中
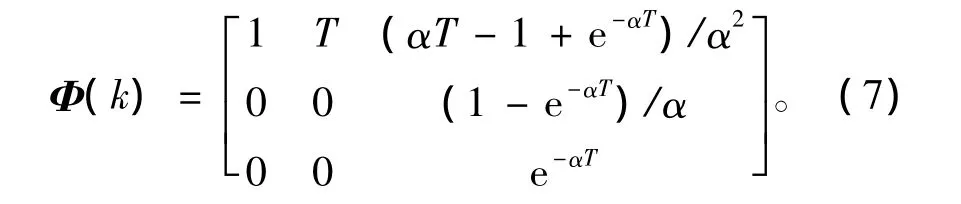
α為自相關時間常數,若假定αT<<1,即采樣間隔T比機動自相關時間常數1/α小得多。在雷達對目標的跟蹤中,如果信息更新率足夠高,則認為上述假定(αT<<1)是正確的。
其離散時間過程噪聲V具有協方差
輸入控制矩陣
2)觀測方程
離散系統觀測方程為

取觀測向量為

觀測雷達得到的球坐標系下的信息轉換到直角坐標系下,

觀測方程的轉移矩陣

觀測噪聲V(k)是0均值,白色高斯過程噪聲序列且相互獨立,協方差為R(k),V(k)的統計特性為:
1.2 引入距變率和角變率的轉換坐標卡爾曼濾波算法(ARRKF)
在上述CMKF算法的基礎上,對如下變量進行推算,其余變量不變,得:
2 算法描述
不考慮系統誤差V(k),則上述模型可借由標準卡爾曼濾波器進行實現。
1)輸入初值X1,P1;
2)狀態預測,

3)狀態預測協方差陣,

4)增益矩陣預測,

5)狀態估計,

6)狀態估計協方差陣,

7)是否停止解算?是,結束;否則,轉回狀態預測。
3 仿真實現
用Matlab軟件,采用蒙特卡羅法進行仿真實現。
3.1 初始設定
設目標在三維空間內進行機動,前2 s做速度為850 m/s的勻速直線運動,2~6 s做加速度為100 m/s2的勻加速運動,6~10 s做方位角速度 0.2 rad/s、高低角速度0.1 rad/s的勻速轉彎運動:初始斜距11 325 m;雷達采樣率50 Hz;采樣持續時間10 s;觀測距離隨機誤差5 m;觀測距變率隨機誤差2 m/s;觀測方位角、高低角隨機誤差0.9 mrad;觀測方位角、高低角變化率隨機誤差0.5 mrad/s。
3.2 仿真結果及分析
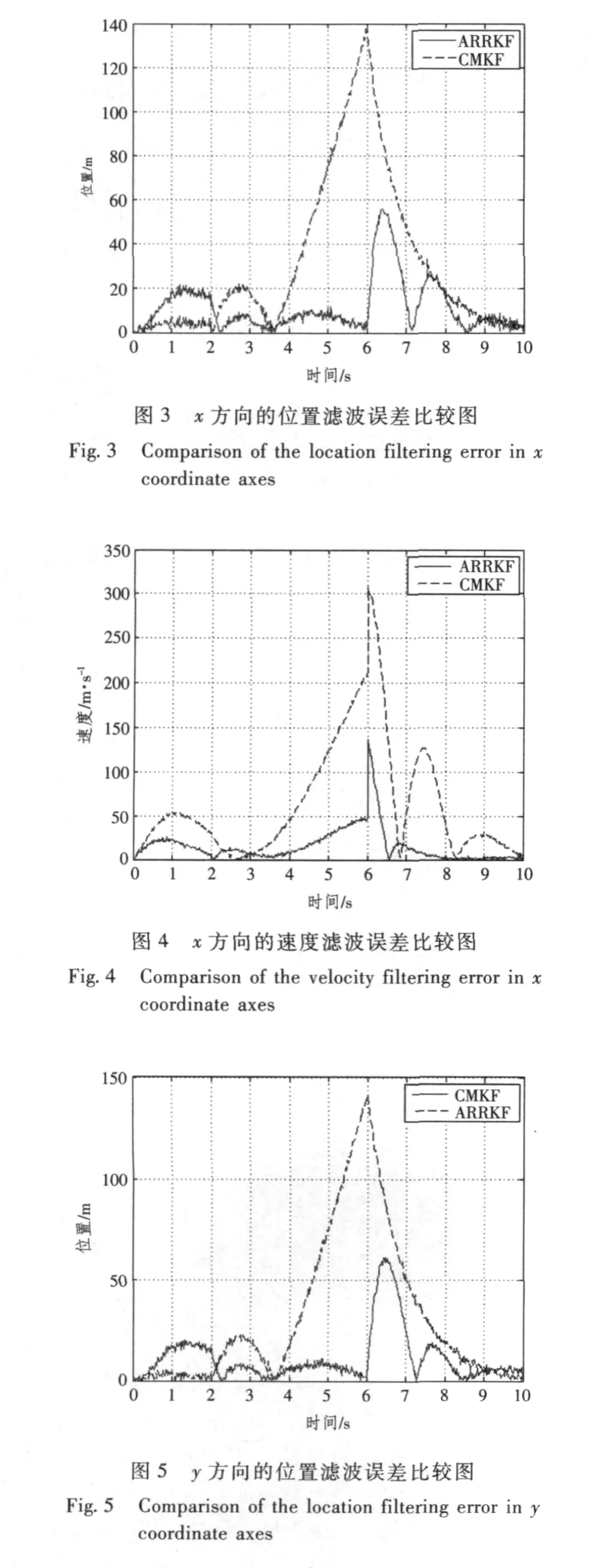
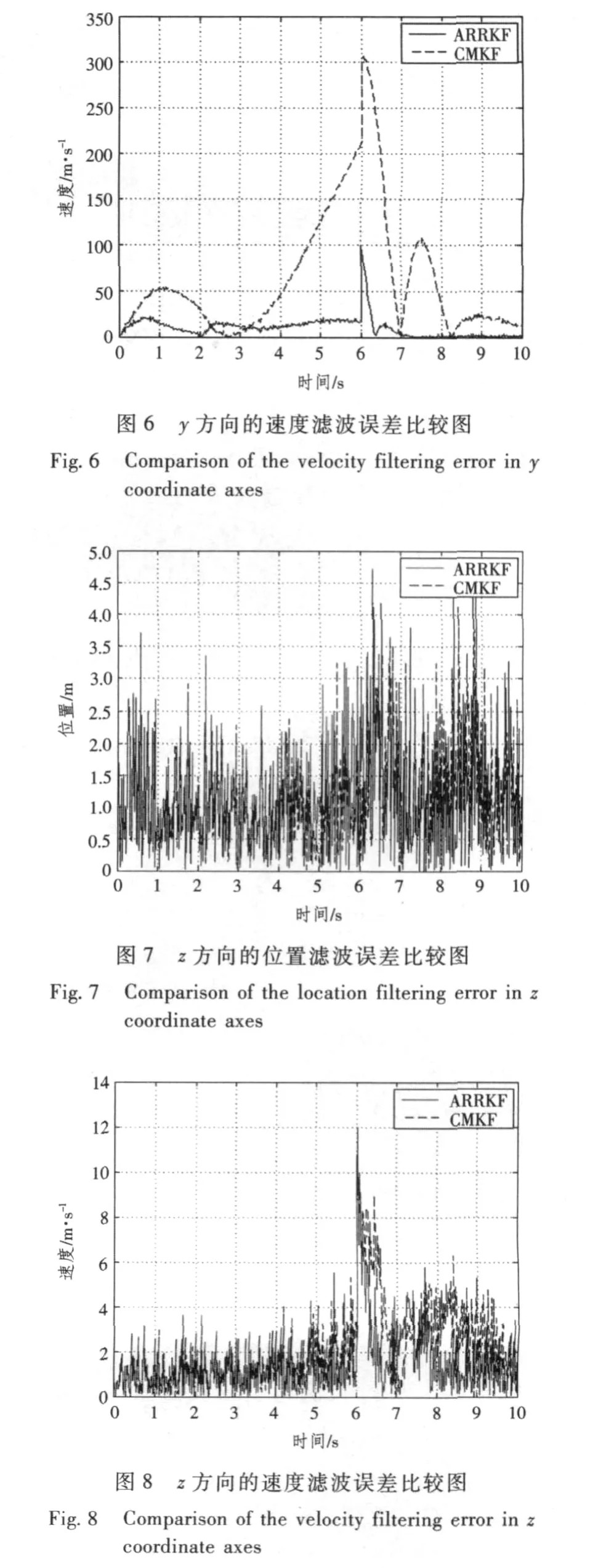
將目標運動軌跡在三維空間中進行模擬,并將雷達觀測值、2種離散濾波的結果在同一空間中進行模擬,結果如圖2~圖8所示。
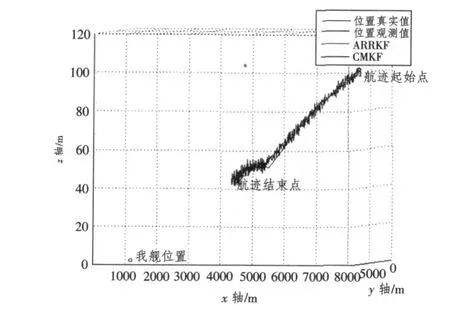
圖2 目標運動軌跡及2種濾波模擬Fig.2 Simulation of target trajectory and two filter algorithm
由仿真結果可以看出,對x軸和y軸位置信息來說,在目標尚未發生機動的0~2 s,ARRKF的濾波效果比CMKF差,但在目標機動發生后,其濾波效果要明顯好于CMKF;對x軸和y軸速度信息來說,不論目標是否作機動,ARRKF的濾波效果始終好于CMKF;2種算法對z軸位置信息和速度信息的濾波效果相差不大。這說明引入速率量測后,CS濾波算法對三維空間中作機動的目標跟蹤能力有了較明顯提高,但對于不作機動的目標而言,其跟蹤精度較差。
4 結語
本文首先將三坐標雷達的觀測值從極坐標系轉換到直角坐標系下,再將一維CS模型應用于直角坐標系的3個坐標軸上,對目標分別進行濾波,再將所得結果進行合成,完成了對三維空間機動目標的跟蹤,并且通過引入目標的速率觀測量來改善濾波結果。仿真實驗證明,該方法可有效提高CS模型對三維空間機動目標的濾波效果。
[1]熊偉,張晶煒,何友.擴展式機動目標當前統計模型[J].電光與控制,2004,11(2):15 -17.
XIONG Wei,ZHANG Jing-wei,HE You.Extended current statistical model form meuvering target[J].Electronics Optics & Control,2004,11(2):15 -17.
[2]隋紅波,房曉穎,吳瑛.改進的當前統計模型及自適應跟蹤算法[J].雷達科學與技術,2008,(3):202-205.
SUI Hong-bo,FANG Xiao-ying,WU Ying.A modified adaptive tracking algorithm based on current statistic model[J].Radar Science and Techno1ogy,2008,(3):202 -205.
[3]孫福明,吳秀清,祁凱.基于當前統計模型的自適應強跟蹤算法[J].數據采集與處理,2008,23(2):191 -195.
SUN Fu-ming,WU Xiu-qing,QI Kai.Adaptive strong tracking algorithm based on current statistical model[J].Journa1of Data Acquisition & Processing,2008,23(2):191-195.
[4]王航宇,王士杰,李鵬.艦載火控原理[M].北京:國防工業出版社,2006.22 -26.
WANG Hang-yu,WANG Shi-jie,LI Peng.Ship fire control principle[M].Beijing:National Defense Industry Press,2006.22 -26.
[5]石章松,劉忠,等.目標跟蹤與數據融合理論及方法[M].北京:國防工業出版社,2010.
SHI Zhang-song,LIU Zhong.Method and theory of target tracking and data fusion[M].Beijing:National Defense Industry Press,2010.
[6]何友,修建娟,張晶煒,等.雷達數據處理及應用[M].北京:電子工業出版社,2006.25 -27.
HE You,XIU Jian-juan,ZHANG Jing-wei,et al.Radar data processing with applications[M].Beijing:Publishing House of Electronics Industry,2006.25 -27.
A maneuvering target-tracking algorithm in the three-demension based on current statistical model
JIANG Wei,TIAN Zi-xi,ZHANG Bao-yu
(College of Electronic Engineering,Naval University of Engineering,Wuhan 430033,China)
In the three-dimensional space,a new method for the current statistical kalman filtering algorithm using the radial velocity is presented for radar awareness system,which can detect target radial velocity and target angular velocity.A simulation about the pseudo Kalman filtering put forward by this thesis and the traditional Kalman filtering is given,which aim at the maneuvering target in three-demension.Simulation results indicate that the convergent velocity is accelerated and the convergent precision is increased when the radial velocity and angular velocity is adopted.The new pseudo Kalman filtering has some significance for project practice.
target tracking;current statistical;radial velocity;angular velocity;three-dimension
TN951
A
1672-7649(2011)12-0024-04
10.3404/j.issn.1672-7649.2011.12.005
2011-01-11;
2011-02-23
姜偉(1982-),男,碩士研究生,研究方向為艦載火控系統。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19