PPS導向系統在西秦嶺隧道TBM施工中的應用
2011-06-15 02:20:06戴斌,陳明
隧道建設(中英文) 2011年2期
戴 斌,陳 明
(中隧集團蘭渝鐵路西秦嶺隧道項目部,甘肅武都 7460251)
0 引言
近年來隨著我國經濟的發展及施工水平的提高,越來越多的長大隧道開始采用TBM(隧道掘進機)掘進施工,而TBM也因其快速、安全、環保的特點,顯示出其他施工方法無可比擬的優越性。常規的人工測量方法已經不能滿足TBM快速掘進的要求,PPS自動導向系統應運而生,并以其精確、快速、自動化的工作特點,成為TBM施工的主流導向系統。目前在施工測量技術領域,文獻[1-2]對各種導向系統的選用進行了比較和技術總結,文獻[3-4]介紹了PPS系統的基本組成及工作原理,文獻[5-6]對其誤差形成進行了分析,并提出了TBM糾偏方案,文獻[7]介紹了PPS系統安裝方法及常見故障分析。本文在此基礎上對已有的研究文獻中PPS系統的工作原理、安裝方法等不詳之處進行了詳細說明,結合PPS在西秦嶺隧道TBM施工中的實際經驗提出減小測量誤差的措施,并總結了大部分常見故障的排除方案,對PPS系統硬件損壞時的應急工作方法提出獨到見解。以期達到PPS系統提供持續、有效、精確的掘進參考數據的目的,希望為其他工程中的PPS測量工作提供一些借鑒。
1 概述
西秦嶺隧道作為全線控制性工程,全長28 km,TBM掘進段13.7 km,采用直徑10.2 m的敞開式硬巖掘進機施工。隧道軸線允許偏差±10 cm,高程允許偏差±10 cm,PPS導向系統的正常工作是保證TBM掘進精度的前提,本文將就PPS導向系統在西秦嶺隧道的實際應用情況,對此進行闡述。
2 PPS導向系統工作原理
2.1 系統組成
PPS導向系統由馬達棱鏡、傾斜儀、全站儀及其電源盒、后視棱鏡、多路器、屏蔽數據線、無線發射裝置、裝有PPS程序軟件的工業電腦組成,如圖1所示。
2.1.1 馬達棱鏡
2個馬達棱鏡在始發前安裝在TBM主機上,用螺栓固定牢固,安裝后需對棱鏡進行防水、防碰撞的保護措施。棱鏡的安裝位置一定要考慮通視條件的影響,確保全站儀與馬達棱鏡之間無障礙物阻隔。
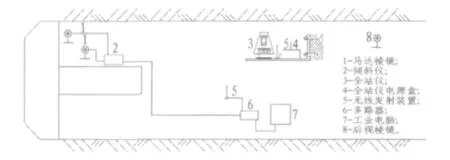
圖1 PPS導向系統示意圖Fig.1 Sketch of PPS guiding system
棱鏡安裝完畢后,需要測量2個馬達棱鏡的機器坐標,即棱鏡在以TBM刀盤中心為原點的坐標系中的三維坐標值(水平、徑向、垂直)。工作中如果馬達棱鏡發生移動,則必須重新測量棱鏡的機器坐標。
2.1.2 傾斜儀
傾斜儀安裝在TBM主機上,為保證傾斜儀準確測量出TBM主機的姿態變化,傾斜儀與TBM主機必須保持相對靜止,因此,需要采用剛性連接進行固定(支架焊接在TBM主機上,傾斜儀用螺栓可靠固定在支架上),并進行防水、防碰撞的保護措施。
傾斜儀主要作用為測量TBM主機的滾動值(橫向滾動,以掘進方向順時針為正)與仰俯值(縱向坡度,以掘進方向向上為正)。在傾斜儀安裝完成后需對傾斜儀初始值進行測量。找到TBM主機的一個理論水平面,分別沿橫向、縱向標定2個點,測量2個點的水平距離與高差,并計算出該面的實際滾動值與仰俯值。得到的滾動值、仰俯值單位為mm/m,即千分坡度,應換算成以゜為單位的角度值,但該角度值不是通常的以360゜為一個圓周,而是以400゜為一個圓周進行換算,應引起特別注意。傾斜儀初始值應定期復核,工作中如果傾斜儀發生移動也必須重新測量其初始值。
傾斜儀同時還有數據傳輸的作用,其4個接口分別為1#與2#馬達棱鏡接口、電源線接口、數據線接口(與多路器連接,見圖1)。
2.1.3 全站儀與后視棱鏡
全站儀與后視棱鏡的支架固定在隧道洞壁上,全站儀與后視棱鏡通過螺栓與支架連接牢固。全站儀電源盒放置在全站儀支架上,為全站儀提供電源并傳輸數據,電源盒上的3個接口分別為電源盒電源線接口、全站儀連接線接口及無線發射裝置接口。全站儀與后視棱鏡安裝后由人工測量其三維坐標(Y,X,H),采用三角高程傳遞時應注意,支架上的全站儀與后視棱鏡的儀器高應為0。
2.1.4 其他部件
多路器安裝在工業電腦附近,起數據傳輸的作用,其接口分別為多路器電源接口、傾斜儀數據線接口、無線發射裝置接口、工業電腦數據線接口。
工業電腦上安裝有PPS程序軟件,顯示PPS導向系統通過自動測量得到的最終結果。
2.2 系統運行
2.2.1 初始參數的輸入
PPS程序首次運行前需要輸入必要的初始參數。
1)建立隧道理論中線。將隧道中線按1 m的間隔建立中線點,在文本文檔中依次輸入中線點里程(Station)、東坐標(East)、北坐標(North)及高程(Elevation),在PPS程序軟件中導入該文本文檔,隧道理論中線即可成功創建。接著創建一個工程文件(Project),定期備份工程文件,在因故障重裝系統后導入備份的工程文件即可恢復數據。
2)輸入測量參數。依次輸入傾斜儀初始值(滾動值 Roll、仰俯值 Pitch、偏航值),1#,2#馬達棱鏡機器坐標,全站儀與后視棱鏡三維坐標(Y,X,H),后視棱鏡定位角度(水平角、豎直角)與斜距,1#,2#馬達棱鏡定位角度(水平角、豎直角)。
輸入馬達棱鏡機器坐標或定位角度時應注意輸入順序與馬達棱鏡的編號(1#,2#)一致。后視棱鏡、馬達棱鏡的定向角度中的水平角為全站儀直接測量所得,只要后視棱鏡與馬達棱鏡之間的角度差值不變,該水平角可為任意值。一般不應把后視棱鏡水平角設為0,否則系統會無法識別。
3)其他參數。剩余待輸入參數包括TBM設備定義參數、允許誤差范圍、糾偏路線最小拐彎半徑、屏幕顯示參數等,可根據工程的實際要求選擇。
2.2.2 運行PPS導向系統
通過PPS程序軟件運行整個PPS導向系統,系統開始自動初始化COM接口、多路器、傾斜儀 (含馬達棱鏡)、全站儀,正、倒鏡檢查后視方位,測量1#馬達棱鏡,讀取傾斜儀讀數,測量2#馬達棱鏡,完成一個測量循環后程序將測量結果以圖形的形式顯示出來,并標示出TBM主機機頭、機尾的偏移量,建議糾偏路線,TBM刀盤的滾動值、仰俯值,顯示當前TBM刀盤中心的三維坐標、刀盤里程、掘進距離等,非常方便。
PPS程序自帶檢查功能,輸入全站儀與后視棱鏡坐標及定向角度有誤或測量誤差引起的后視方位錯誤程序會自動彈出對話框提醒,并無法運行系統;在正常工作中,意外移動全站儀或后視棱鏡造成方位錯誤,系統在檢查后視方位時也會給出警告;同時,每個測量循環系統將全站儀測得的1#,2#馬達棱鏡距離與根據傾斜儀測得的坡度值反算出的棱鏡距離進行比對,超限時顯示紅顏色的警告,提醒測量人員進行復核。
3 測量誤差的控制
3.1 人工因素
PPS的測量工作仍然是以洞內導線點、高程點等控制點為基點的,控制點測量的精度是PPS準確工作的前提,而且PPS日常轉站也是由測量人員手動操作,所以測量人員的技術水平是控制PPS測量精度的一個關鍵因素。
3.2 圍巖變形
全站儀及后視棱鏡通過支架固定在隧道洞壁上,當圍巖發生收斂變形時全站儀及后視棱鏡也會發生位移,此時方位誤差若未超限,PPS還會繼續工作,但誤差已經在積累,如圖2所示。后視棱鏡較全站儀位置較早開挖,圍巖收斂速度也較全站儀位置緩慢,隨著圍巖變形的增大,TBM司機根據PPS程序顯示進行掘進,TBM主機也向圍巖收斂方向偏移,如果連續幾次快速轉站 (非控制點轉站),則這種誤差會越積累越大,且不易被發覺,直到重新從控制點轉站后,誤差得到修正,PPS程序顯示TBM主機位置發生橫向突變。
此類誤差可采取以下措施減小影響。
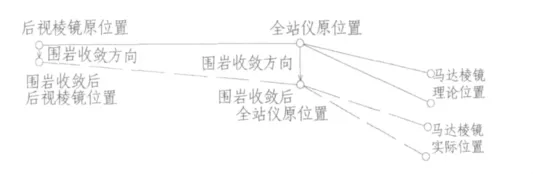
圖2 圍巖變形影響示意圖Fig.2 Sketch of effect of surrounding rock deformation
3.2.1 控制點轉站減小圍巖收斂影響
PPS導向系統日常轉站分為2種:快速轉站與控制點轉站。快速轉站直接以現有全站儀、后視棱鏡支架為基點,測量新全站儀支架三維坐標,然后將全站儀移動到新支架上即可;控制點轉站以隧道內控制點為基點,測量新全站儀支架三維坐標,然后移動全站儀到新支架上。
快速轉站快速、簡便,但誤差會隨轉站次數而積累。因此,在圍巖變形較大的地段應盡量采用從控制點轉站的方法進行作業。
3.2.2 減小每次轉站距離
圍巖收斂變形隨時間增長逐漸積累增大,因此,在相同掘進速度下,縮短轉站距離即縮小轉站時間間隔,會降低圍巖收斂對測量精度的影響。
本工程中,圍巖收斂變形較小的地段40~50 m轉站一次,在收斂變形大的地段轉站距離則減小到20 m左右。如遇TBM停機超過2 d,再次開機掘進前需對全站儀、后視棱鏡坐標進行重新復核。
3.3 其他影響測量精度的因素
3.3.1 高溫、強光影響
受TBM作業區域限制,全站儀視線有時會穿過高溫氣體或強光區域,如VFD配電柜上方、電弧焊作業區、強光照明燈等。由于局部溫度過高或強光干擾,此時光線穿過會發生折射,造成測量結果偏差;因此,在實際工作中應盡量避免。
3.3.2 灰塵、滲水影響
TBM掘進時刀盤擾動圍巖、輸送帶轉碴、噴射混凝土作業等均會產生大量灰塵,尚未遮擋視線時,光線穿過灰塵時會發生衍射,造成測量結果偏差;因此,在實際工作中應保證通風、除塵系統正常運行。
當全站儀視線剛好穿過滲水區時,光線穿過滴落的水滴時會發生折射,同樣會造成測量結果偏差,此時應對滲水區進行防水措施處理,如埋設盲管、鋪設防水板將水引流。
4 PPS導向系統的日常維護及常見故障的排除
4.1 PPS導向系統的日常維護
PPS導向系統的正常運行離不開日常的維護,測量人員需提高對該工作的重視程度并確保落實到位。PPS系統的日常維護工作主要包括:
1)每天對所有電源線、數據線、無線發射裝置進行檢查,接頭松動的及時擰緊,線路破損的及時更換。
2)每天用專用清潔紙巾清潔馬達棱鏡鏡面、全站儀鏡頭及表面、后視棱鏡鏡面。
3)每天檢查馬達棱鏡固定螺栓是否松動,如有松動重新擰緊并復核發生松動的馬達棱鏡機器坐標。
4)每周對PPS程序數據進行一次備份。
5)每2周對傾斜儀滾動值、仰俯值進行一次校核。6)每4周復核一次馬達棱鏡機器坐標。
7)每6個月對全站儀進行一次校核。
4.2 PPS導向系統常見故障及排除方法
在PPS導向系統運行中出現的不同故障,可依照程序報錯類型大致分類,然后進行排除。
4.2.1 COM 接口初始化錯誤
當PPS系統程序提示COM接口初始化錯誤時,首先檢查裝有PPS程序的工業電腦是否與多路器連接良好,如果連接沒有問題,則檢查工業電腦連接多路器的COM接口編號是否與PPS系統程序中選定的編號一致,比如工業電腦接口為COM3,則PPS程序中也必須選定相應的COM3。編號無誤仍不能初始化COM接口時,嘗試拔下工業電腦COM接頭,并重新插上(必要時可重新啟動電腦)接頭,因為某些電腦在非正常關機后重新啟動,可能造成系統無法識別接口。如以上情況均已排除,問題仍未解決,則很有可能是COM接口驅動問題,嘗試重新更新工業電腦上的COM接口驅動,問題應該就能得到解決了。
4.2.2 初始化傾斜儀失敗或讀取傾斜儀數據失敗
檢查傾斜儀電源線、數據線是否破損,接頭是否松動,如線路沒有問題則可能是傾斜儀自身故障。
4.2.3 棱鏡問題
1)關閉1#(或2#)棱鏡失敗。可能原因為馬達棱鏡連接線損壞、接頭松動或者接觸不良、馬達棱鏡損壞。
2)棱鏡錯誤(Problem with prism)。可能原因為1#(或2#)馬達棱鏡連接線接頭接觸時斷時續,不能穩定接收系統信號。
3)尋找棱鏡錯誤。可能原因為全站儀與后視棱鏡、馬達棱鏡之間有障礙物阻隔,無法通視。
4.2.4 全站儀問題
1)初始化全站儀錯誤。可能原因為全站儀電源盒斷電、無線發射裝置接口松動或損壞、全站儀故障。
2)只有角度測量可用。可能原因為空氣粉塵含量過高,影響通視條件,此類情況加強通風即可解決;或者全站儀測距板故障,此類情況需要對全站儀進行檢修。
3)全站儀水平出錯。可能原因為意外移動支架或者圍巖變形導致全站儀豎軸傾斜度超出補償器補償范圍,全站儀無法工作,重新調平并復核全站儀坐標即可。
4.2.5 后視方位錯誤
轉站工作中輸入坐標參數后,彈出對話框提示后視方位錯誤,并無法運行測量程序,導致該情況出現的原因為輸入有誤或者轉站工作中測量誤差超限。
系統運行過程中出現方位錯誤的提示,則可能是全站儀或者后視棱鏡支架意外移動,造成后視方位超限,重新復核全站儀和后視棱鏡三維坐標即可。
5 手動測量應急工作模式
手動測量模式是PPS導向系統提供的一種應急工作模式,在系統某些組件損壞無法工作時,可選擇相對應的手動模式對TBM進行導向。手動測量共有4種可供選擇。
5.1 手動傾斜儀模式
當傾斜儀損壞不能進行滾動值、仰俯值測量時,選擇此模式,運行測量程序后按系統提示將人工測得的滾動值與仰俯值(以角度形式輸入,詳見2.1.2傾斜儀初始值測量的相關說明)輸入對話框中,其他工作則由系統自動完成。
5.2 手動全站儀模式
當PPS系統匹配的全站儀不能工作,例如儀器故障或者送專業單位檢校時,用其他非PPS系統匹配的全站儀進行替代,系統不一定能夠成功識別,此時可選擇該模式,運行測量程序,根據提示手動對準后視棱鏡(正、倒鏡各1次)、馬達棱鏡進行測量并分別輸入對話框中,其他工作由系統自動完成。
5.3 手動全站儀及棱鏡模式
當馬達棱鏡損壞時,用普通圓棱鏡進行替代,系統不能控制棱鏡打開或關閉,且有可能同時發生5.2中的情況,選擇此模式,運行測量程序,根據提示手動對準后視棱鏡(正、倒鏡各1次)、2個前視棱鏡進行測量并分別輸入對話框中,其他工作由系統自動完成。
手動全站儀模式與手動全站儀及棱鏡模式的區別在于:手動全站儀模式測量時,馬達棱鏡由系統自動控制打開、關閉,而手動全站儀及棱鏡模式則由人工控制前視棱鏡朝向或背對全站儀,這一點應引起重視,因為2個前視棱鏡距離較近,不能同時全部面向全站儀進行測量,否則2個棱鏡同時反射測量激光會導致測量結果不準確。
5.4 全手動模式
此模式僅用于傾斜儀與馬達棱鏡、傾斜儀與全站儀或者三者同時不能工作時的情況。
選擇此模式后,PPS系統已基本癱瘓,運行測量程序后根據提示手動對準后視棱鏡(正、倒鏡各1次)、2個前視棱鏡進行測量,人工測量TBM主機的滾動值、仰俯值,并輸入到對話框中,PPS程序僅進行計算工作,并將計算結果以圖像的形式顯示在屏幕上。
6 結論
由于TBM施工進度很快,PPS導向系統必須能夠提供持續、有效、精確的數據作為調整方向的參考標準。這就要求PPS系統必須能夠保證良好的工作狀態,測量人員需要掌握PPS系統的工作原理,做好日常的維護、保養工作,在出現故障時能夠第一時間予以恢復,并在硬件損壞的情況下仍能夠提供有效的數據指導掘進。
當遇到較硬圍巖時,TBM刀盤掘進時震動很大,長時間的震動會導致馬達棱鏡損壞,而且損壞頻率比較高。關于延長馬達棱鏡的使用壽命,目前還在試驗與探討中,例如加設緩沖墊層或者對棱鏡進行一些改動等,但是方案尚不成熟。
[1] 康寶生.淺談盾構和TBM的導向系統[J].建筑機械化,2010,31(2):70 -73.
[2] 崔志偉,張曉慧,于英濤,等.TBM激光導向控制在大伙房水庫輸水隧洞施工中的運用[J].東北水利水電,2007,25(11):13-14.
[3] 王國輝,馬莉.TBM隧道掘進中的激光導向系統[J].鐵道建筑,2006(6):24-26.
[4] 王世霏,孫永浩,朱玉峰,等.PPS導向系統在TBM中的應用[J].水利水電技術,2006,37(3):31 -33.(WANG Shifei,SUN Yonghao,ZHU Yufeng,et al.Application of PPS orientating system totunnelingwith TBM[J].Water Resources and Hydropower Engineering,2006,37(3):31 -33.(in Chinese))
[5] 申華偉,李麗.激光導向系統在TBM中的工作原理及其影響因素[J].科技情報開發與經濟,2007,17(19):196-197.(SHEN Huawei,LI Li.The operating principles and the influencing factors of laser guiding system in TBM:tunnel boring machine[J].Sci/Tech Information Development &Economy,2007,17(19):196 -197.(in Chinese))
[6] 宋瀛道.淺談錦屏電站引水隧洞TBM施工測量方法[J].鐵道建筑技術,2009(11):68-71.(SONG Yingdao.Discussion on the measure method of the TBM construction for the diversion tunnel of Jinping hydropower station[J].Railway Construction Technology,2009(11):68 - 71.(in Chinese))
[7] 趙毅.PPS-TBM導向系統的應用與管理[J].隧道建設,2010,30(1):63 - 66,96.(ZHAO Yi.Application and management of PPS guidance system of TBM[J].Tunnel Construction,2010,30(1):63 -66,96.(in Chinese))
[8] 連杰.淺析TBM施工中激光導向糾偏系統的應用[J].科技信息:科學·教研,2008(14):368.
[9] 中華人民共和國住房和城鄉建設部.GB50046-2008盾構法隧道施工與驗收規范[S].北京:中國建筑工業出版社,2008:14-15.
[10]中國鐵路工程總公司.鐵建設[2007]106號 鐵路隧道全斷面巖石掘進機法技術指南[S].北京:中國鐵道出版社,2007:44-49.
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華建設(2019年12期)2019-12-31 06:47:58
工程與建設(2019年3期)2019-10-10 01:40:18
人大建設(2019年12期)2019-05-21 02:55:44
江西建材(2018年4期)2018-04-10 12:37:22
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
電測與儀表(2016年9期)2016-04-12 00:29:52
中國衛生(2015年3期)2015-11-19 02:53:32
江西煤炭科技(2015年1期)2015-11-07 03:06:32