升降機試驗臺無線測控系統的實現
2011-06-14 01:37:10戴亞文李小強
無線電工程 2011年5期
關鍵詞:系統
李 鵬,戴亞文,李小強
(武漢理工大學理學院,湖北武漢430070)
0 引言
研制導軌式殘障人運送升降機(以下簡稱“升降機”)綜合性能試驗臺是國家科技部支撐計劃“室內移動輔具關鍵技術與目標產品研發”課題中的一項任務,其目的是為軌道式殘障人運送升降機的研制、檢測和驗收創造條件。
目前測試平臺所采用的數據傳輸方案大致可分為有線傳輸和無線傳輸2種。有線傳輸的方案由于導線容易磨損和布線難等問題并不適用于疲勞性測試項目,而現有的無線技術已經完全能夠滿足系統的傳輸速度需要。因此,系統選用無線傳輸的方案并針對無線方案所主要面臨的數據通信沖突、系統的魯棒性與數據的可靠性等問題提出了解決方案。
1 系統結構
系統結構圖如圖1所示。整個系統分為硬件設備和軟件協議2個部分。

圖1 系統結構
硬件設備由主要分為測試平臺終端設備和無線網關設備2個大模塊。測試平臺終端設備主要由電源管理模塊、傳感器模塊、電平轉換模塊和數據處理模塊組成。設計中選用拉線位移傳感器測量被測設備的位置狀態與速度、加速度信息,選用拉力傳感器測量被測設備的載荷狀態,藉此以得到被測設備在不同條件下的特性,為產品的安全性、可靠性和耐久性生產設計提供指導。無線網關設備負責網絡組建、數據和控制命令的轉發與處理,實現測試平臺的終端設備與測試終端PC機或筆記本電腦的通信。它主要由數據處理模塊和通信協議轉換模塊組成。
軟件協議部分包括上位機軟件和通信協議。上位機軟件由NI公司的LabVIEW軟件編寫[1],為用戶提供完善的人機交互功能,通過上位機軟件來控制硬件的運行,同時,硬件運行所采集到的數據通過上位機處理、顯示和保存,存儲的數據通過ASP調用SQL數據庫能夠隨時隨地通過網站了解設備的測試情況。根據測試的具體要求,通信協議在基于802.15.4協議依照系統的需求進行了優化[2],提出了適用于測試平臺的數據通信協議和數字濾波算法,保障了測試平臺工作的穩定性和數據的可靠性。
2 系統硬件組成
設計采用無線的方式進行數據通信,需要數據處理與射頻收發設備。結合市場現在的通信方式與系統設計的特點,選擇TI公司的CC2430處理器作為測試平臺終端設備和無線網關的核心器件。該芯片支持IEEE802.15.4通信標準,在芯片內部集成了8通道的模數轉換器和射頻收發器,具有大量的I/O接口,有利于系統的擴展[3]。
系統選用MIRAN公司MPS-M-2000-V2拉線位移傳感器和蚌埠天光測控儀表廠的TJL-1型拉力傳感器。MPS-M-2000-V2拉線位移傳感器有效量程可達2 000 mm,線性精度為0.3%FS,牽引力最大可達2.5 kg。TJL-1型拉力傳感器額定載荷為150 kg,靈敏度為2.0 mV/V。2款高精度的傳感器完全可以準確地反應升降機的運行狀態。同時,CC2430內置的高精度定時器能精確地控制AD轉換的速率。由于升降機在實際運行中不可能有很大的速度和加速度,因此,根據位移計算公式:S=v*t+*a*t2,可以通過拉線位移傳感器和CC2430處理器得到在時間t時的位移量S,然后通過位移計算公式得出升降機的運行速度和加速度。這樣可以避免額外增加一個加速度傳感器,節約設計成本。
系統的設計采用蓄電池進行供電。在硬件設計中,拉線位移傳感器用12 V電源供電,拉力傳感器和主處理器CC2430采用3.3 V電源供電。標準的蓄電池有12 V和24 V的,但其在使用過程中,輸出電壓有較大的波動,直接使用12 V的蓄電池給拉線位移傳感器供電會影響傳感器的精度。因此,采用24 V蓄電池作為系統電源,選用LM2576電源芯片,輸出12 V和3.3 V給系統供電。
從電機控制電路過來的信號接口,其高電平達5 V,而CC2430處理器的控制信號高電平為3.3 V。這種電平不兼容性在直接連接時,不能實現控制功能,而且有可能損壞器件。因此,應用光電轉換器件TLP281設計電平轉換電路,實現信號電平的兼容。
3 系統上位機軟件
系統所述的上位機軟件是利用NI公司的LabVIEW環境編寫,界面友好,方便人機交互。軟件的主要功能是實時接收由串口傳遞的測試數據并加以分包、計算、處理、顯示及保存。用戶通過上位機軟件能夠便捷地了解到測試過程的具體情況并能對測試進行具體的操作。
3.1 軟硬件握手
為了提高系統的魯棒性,避免PC機異常卡死對硬件產生的影響,上位機軟件每隔5 s通過數據接收終端向數據發送終端發送握手命令。握手的應用能夠防止當PC機斷電或windows意外死機時候升降機仍然繼續按照預定的測試次數繼續測試。
3.2 數據庫保存以及遠程訪問
利用工具包LabVIEW SQL Toolkit的實現SQL數據庫的保存,將經過上位機前端處理后的數據按照預定的格式循環寫入SQL SERVERS數據庫中[4]。同時,在上位機中加入異常處理,在系統出現斷電或者其他異常狀況導致系統終止時,在下次開啟的時候自動讀取數據庫中的最新記錄以提醒用戶已經測試的周期數以及測試的時間,方便用戶繼續測試。
在SQLSERVERS服務器端使用ASP調用SQL數據庫,將最終結果發布到萬維網[5],使得用戶在任何時候任何地點都能夠及時了解到測試的具體情況,真正實現了不受距離影響的遠程監控系統。
4 系統協議
協議是測試臺系統的核心部分,不僅起著保證測試臺工作穩定性和所需測試數據的可靠性作用,還為上位機監控系統提供在穩定性上的先決支撐。由于測試臺需要對升降機的測試狀態進行實時地檢測,在無線通信上的數據交互要求具有穩定性,避免數據沖突,在數據處理上要求可靠性,需要進行數字濾波,為此在通信協議上提出一種集權輪詢法和自適應變頻濾波法,保障了測試臺工作的穩定性和數據的可靠性。
4.1 集權輪詢法
通常所采用的IEEE802.15.4協議標準的媒體訪問控制(MAC)層的載波偵聽競爭訪問通信機制(CSMA-CA)并不適用于升降機測試臺的應用,當測試平臺終端設備和無線網關設備在測試臺監測升降機數據過程中同時有數據需要發送時,便會產生通信沖突從而導致數據包丟失。為此提出了一種集權輪詢法作為測試臺通信協議MAC層的優化,集權輪詢法示意圖如圖2所示。
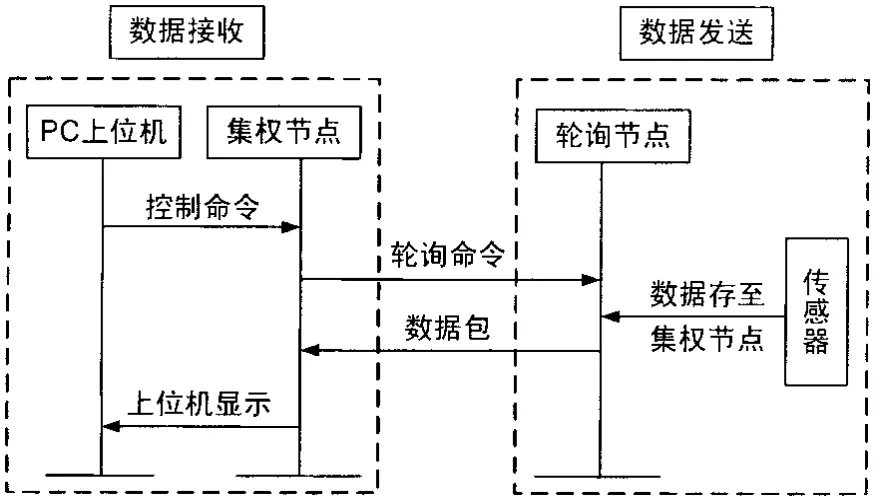
圖2 集權輪詢法示意圖
集權輪詢法是指在無線通信節點中,將其中一個節點作為集權節點,將其他節點作為被輪詢節點,所有的數據通信都以集權節點為發起方,以被輪詢節點為接收方,被輪詢節點的數據包都規定在收到集權命令后才被允許發出,其數據包的發送在一個輪詢時隙內完成,所有被輪詢節點的輪詢時隙組成一個輪詢周期。
在測試臺的通信中,無線網關設備為集權節點,測試平臺終端設備為被輪詢節點,在測試臺對升降機的實時監測過程中,集權節點會周期性地發送輪詢命令至被輪詢節點,升降機的位移、載荷和電量等數據都會在被輪詢節點中處理并打包,當每次收到輪詢命令后,便在輪詢時隙內發送給集權節點。這種集權輪詢法在一定程度上既保證了測試人員對測試臺控制的實時性,又保證了測試臺對升降機監測數據的穩定性,避免了二者在數據收與發上的通信沖突,解決了實時監測過程中的丟包問題。測試人員對測試臺的控制命令和無線網關對測試平臺終端設備的管理命令都是嵌入在輪詢命令中發出的,被輪詢節點收到輪詢命令后做出相關反應并上傳發送數據。一個輪詢時隙大約在30 ms左右,控制命令的下達和監測數據的更新都會在輪詢時隙內完成,很好地滿足了測試平臺實時監控的要求。
4.2 自適應變頻濾波法
傳感器對升降機狀態的監測s都是模擬信號輸出,難免會受到各種因素的干擾,在對信號做模數轉換后還需要對所得到的數據做數字濾波處理,這個處理的過程屬于通信協議應用層的任務。
4.2.1 濾波算法的提出
在被監測的數據中,升降機的位移量數據是可靠性要求最高的一個,它直接影響后期升降機運行速度和加速度等參數的計算和對升降機運行狀態的識別。而位移量是一個動態變化的數據,干擾噪聲也會淹沒在其中隨之動態變化,傳統的數字濾波法如遞推中值濾波法和限幅平均濾波法等[6],都無法很好地起到濾波效果,因此提出了一種自適應變頻濾波法來處理位移量數據。
升降機位移量的變化可分為2種階段:①升降機的運動狀態在上升和下降之間發生改變時,此時升降機由減速運動轉變為加速運動,位移量呈正弦信號狀態變化;②升降機處在上升或者下降狀態過程中時,此時升降機近乎勻速運動,位移量呈一階信號狀態變化。2種階段交替進行,位移量的變化幅度成周期性改變。假設對位移量的數據采集頻率為f,單位時間內所采集的位移量為Sn(n=1,2…f),位移量的變化幅度為An(n=1,2…f),當單位時間內的An趨近相等時,則認定Sn處于一階信號狀態變化,此時將采集頻率設為f1,而當An出現類似一階信號狀態變化時,則認定Sn處于處于正弦信號狀態變化,此時將采集頻率設為f2。把數據采集頻率f隨位移量變化幅度An變化而自適應變化的濾波方法稱為自適應變頻濾波法。
4.2.2 濾波算法
根據測試臺運行環境的相關參數,將干擾噪聲系數設為k,由上述所提出的自適應變頻濾波算法,將Sn(n=1,2…f)由小到大進行排列得到Sn′(n=1,2…f),將最大和最小k個數據視為噪聲干擾數據去掉,最后可得到濾波后的位移量ˉS。
假定輪詢時隙為t,則t時間內的樣本個數n為:

排列后的位移量樣本為:

則將位移量樣本濾波后的位移量為:

而根據升降機的運動速度水平,要得到更加平滑而有效的數據,f1應大于1 000,而f2則應該是f1的3倍。
位移量在用自適應變頻濾波法濾波前和濾波后的實測數據對比示意圖如圖3所示。

圖3 濾波前后比較
如圖3可知,經過濾波的數據更加趨于平滑,與實際計算結果基本相符(誤差<1%),滿足升降機綜合性能測試的要求。
4.3 測試結果
為了進一步測試系統的性能,在不同環境、不同距離進行了連續40 000個升降機來回周期的測試。結果顯示整個系統運行穩定,魯棒性良好。同時,對40 000個周期的全部800余萬組數據進行多階段抽樣法進行抽樣,誤差均在許可范圍內,抽樣結果完全滿足測試需要。測試結果如表1所示。

表1 測試結果
5 結束語
基于上述理論所設計的導軌式殘疾人升降機綜合測試臺安裝方便、體積小、功耗低、傳輸穩定、采樣精確、可靠性高,完全能夠滿足實際應用的需要。同時,該方案采用無線通信技術,極大提高了監測范圍,可廣泛應用于其他測試領域。
[1]阮奇楨.我和LabVIEW[M].北京航空航天大學出版社,2009.
[2]瞿 雷,劉盛德,胡咸斌.ZigBee技術與應用[M].北京:北京航空航天大學出版社,2007.
[3]劉 偉.傳感器原理及實用技術[M].北京:電子工業出版社,2009.
[4]鄭阿奇.SQL Sever實用教程[M].北京:電子工業出版社,2002.
[5]汪曉平,鐘 軍.ASP網絡卡發技術[M].人民郵電出版社,2003.
[6]遠坂俊昭.測量電子電路設計:濾波器篇[M].北京:科學出版社,2006.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32