利用面向對象法構建反導空中目標三維彈道仿真研究*
2011-06-06 10:06:58龍鵬林平
艦船電子工程 2011年12期
龍 鵬 林 平
(海軍兵種指揮學院 廣州 510430)
1 引言
水面艦艇防空反導除了需要進行理論研究外,還應進行一定的仿真模擬來研究防空反導的作戰過程以對理論進行檢驗和支持。此前的仿真主要集中在彈道模型和引導規律的理論研究及武器系統、單艦、編隊的作戰能力評估等數學模型建立,少有專門進行具體可行的建立通用標準化仿真架構。本文利用面向對象的方法,抽象水面艦艇防空反導過程,研究仿真模型中各個部分的關系并建立相應的類,確定類之間的繼承關系,可以作為一個通用構件給需要此類任務的模型或軟件使用或提供參考。
2 類的抽象和繼承
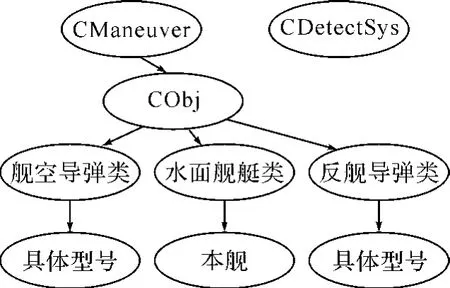
圖1 類的繼承關系
類是面向對象程序設計的核心,是對某一類對象的抽象,類和具體對象是緊密相關的,類抽象定義的好壞亦將關系到程序的通用性和發展性。
影響水面艦艇防空反導空中目標三維彈道的因素有導彈和目標機動性能、探測系統性能、制導方式和采用的引導規律,因此類的抽象和繼承如圖1所示。
CManeuver類作為物體機動類封裝了坐標參數、機動狀態參數、坐標計算轉換函數、運動狀態改變函數和過載限制函數。CDetectSys類為探測系統類主要封裝了系統探測時的距離方位仰角誤差和探測周期頻率等參數、空間中各物體相對位置計算函數。CObj類封裝導彈所處狀態、各種引導規律函數。具體如表1所示。

表1 各個類的定義
3 類的實現
3.1 CManeuver類
3.1.1 空間坐標系模型實現
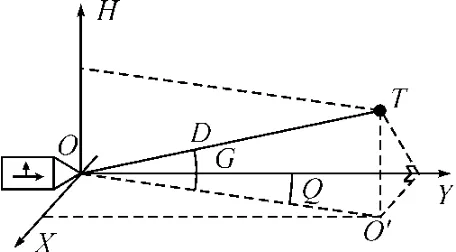
圖2 空間坐標系表示
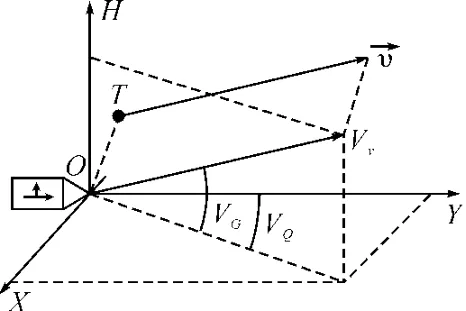
圖3 速度矢量分解
空間坐標系采用三維空間的相對坐標系表示,即將水面艦艇置于坐標系中心原點視為靜止,本艦航向為Y軸、XY軸位于海平面,其他目標以相對航速、相對航向進行機動并相應改變各自對本艦的相對距離、仰角及舷角,如圖2所示。對于水面艦艇,坐標始終為(0,0,0),任意目標坐標為(D,Q,G)。
3.1.2 運動軌跡解算模型實現
如圖3所示,三維空間中任意目標T的速度矢量可以表示為(VV,VQ,VG),VV為速度大小,VQ、VG分別為航向和俯仰角,設當前水面艦艇航速為VO,可表示為(VO,0,0)。對于三維空間中的一個坐標為(D,Q,G)的目標,速度為(VV,VQ,VG),相對水面艦艇的速度為
經過時間Δt后,目標坐標(D′,Q′,G′)可由下式求出
3.1.3 過載限制實現
受最大過載影響,導彈按制導指令轉向的轉向角速度最大為ω,即

當α過大導彈無法完成當前機動時,取α=ω,相應的ΔG、ΔQ、引導信號(VFQ,VFG)變為
3.2 CDetectSys類
已知目標M和T的坐標分別為(Dm,Qm,Gm)和(Dt,Qt,Gt),則目標T相對于目標M的距離、舷角、仰角分別為
3.3 CObj類
CObj類主要封裝了各種引導函數,現在對艦空導彈進行引導的方法主要有三點法和比例導引法,而又以比例導引法最為普遍,因此這里主要實現比例導引法。
測出目標視線在垂直和水平方向上變化的角速度ΔωV、ΔωH,由

可得到依比例導引法引導導彈飛向目標的引導指令ΔVG、ΔVQ,式中K為比例常數,k=1時比例導引法就成為追蹤法,k=+∝時為平行接近法,k一般取值為3。核心算法可如下表示:
4 三維彈道仿真結果演示
假設目標參數為:目標方位右舷90°,目標捷徑45km,目標高度3500m,目標作降高直線勻速飛行,航向-20°,速度220m/s;艦空導彈彈道初始條件為:導彈發射時刻導彈傾角85°、偏角90°,導彈最大可用瞬時轉向角速度60°,比例導引系數3,無控段飛行時間2s。根據以上背景假設條件,可以繪制該垂直發射型艦空導彈運動學彈道三維圖形,如圖4所示。
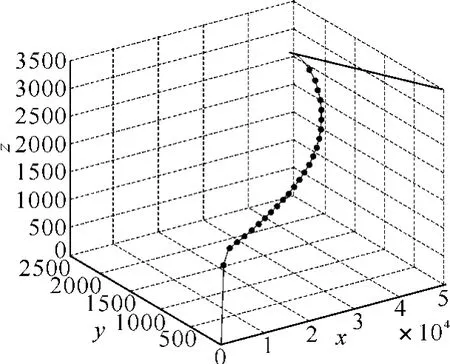
圖4 垂直發射型艦空導彈彈道仿真
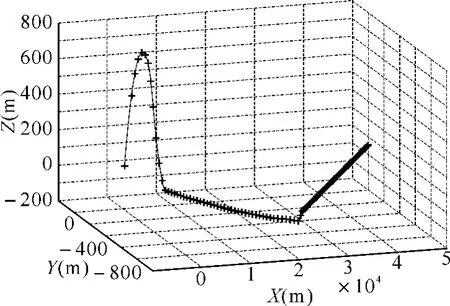
圖5 某反艦導彈彈道仿真
假設來襲反艦導彈飛行速度270m/s。導彈發射后變高至61m巡航高度,在距目標22km時主動雷達開機搜索目標,大約1~2s后捕獲目標降低至10m并在主動雷達導引下轉向目標,距目標3214m時開始進行末端躍升俯沖攻擊機動,躍升角速度10°/s,導彈仰角變為40°時,躍升角速度-10°/s,導彈仰角變為0°時變為俯沖攻擊,攻擊仰角-40°,繪制該反艦導彈運動學彈道三維圖形,如圖5所示。
5 結語
本文的彈道仿真研究是基于垂直發射型艦空導彈利用面向對象方法抽象建類編程實現的,從仿真結果演示來看,彈道符合垂直發射型艦空導彈比例導引彈道和反艦導彈攻擊彈道特征,可比較方便地改變成其他型號導彈彈道實現模型的檢驗以及彈道仿真的演示,便于維護改進。
[1]戴自立.現代艦艇作戰系統[M].北京:國防工業出版社,1999:712~715
[2]鄭阿奇.Visual C++教程[M].北京:機械工業出版社,2004:41~45
[3]馬其東,馬雷挺,鐘志通.垂直發射型艦空導彈比例導引三維彈道仿真研究[J].導彈與航天運載技術,2008(3):15~19
[4]鮑平安,陳輝堂.比例導引法在機器人路徑規劃中的應用[J].航天控制,1997(1):17~50
[5]羅喜霜,張天橋.多用途導彈中末端交班研究[J].彈道學報,2001,13(4):47~50
[6]趙文成,金學英,那嵐.末制導段比例導引法的改進[J].指揮控制與仿真,2009,31(4):97~99
[7]蘇躍斌,辛長范,郭本亮,等.三維比例導引彈道的可視化仿真研究[J].彈箭與制導學報,2010,30(4):57~60
[8]汪浩,曾家有,馬良,等.美艦空導彈武器系統反導作戰流程分析[J].飛航導彈,2009(7):39~40
[9]高尚.比例導引理想彈道仿真[J].計算機工程與設計,2003(24):66~68
[10]李靜,左斌,胡云安.基于變結構控制理論的導彈平滑導引率研究[J].海軍航空工程學院學報,2007:314~316