HMR3000數字羅經在矢量傳感器被動測向浮標中的應用*
2011-06-06 10:06:50孫昕陸揚
艦船電子工程 2011年12期
孫 昕 陸 揚
(91439部隊96分隊 大連 116041)
1 引言
HMR3000數字羅經是美國Honeywell公司生產的一款集航向、俯仰和橫滾三個旋轉量測量于一體的磁敏傳感器,它具有精度高、體積小、功耗低等特點,可方便地集成在一體化小型系統中,在微型飛行器控制、機器人控制以及航海、通信、測量等領域具有廣泛的應用[1~4]。在基于矢量傳感器被動測向原理的矢量傳感器被動測向浮標中,采用HMR3000數字羅經與矢量傳感器封裝一體,將矢量傳感器測得的目標方位轉換為真北方位(大地坐標中的方位),便于測向誤差修正,從而提高了矢量傳感器的測向精度,滿足水下目標高精度方位估計需要;同時羅經數據還可作為測向浮標姿態監控信息。
2 系統硬件設計
2.1 總體結構
HMR3000數字羅經在矢量傳感器被動測向浮標中應用主要是依據羅經數據對矢量測向結果加以修正,給出目標的真方位;在系統設計中,采用MSP430系列單片機完成對數字羅經的輸出信號進行管理,把數字羅經的信號通過RS232串口讀入單片機;并對輔艙電源電壓進行實時監控;將羅經信息通過單片機的異步串口以RS-232方式上傳給通信管理板(嵌入式控制單元);通信管理板將數字羅經的航向信息、姿態信息以及深度信息、浮標GPS定位信息與矢量信號處理單元的數據,通過以太網控制器和無線通信模塊實現與基站通信,上傳數據和結果,下達指令。具體系統結構(僅包含HMR3000數字羅經結構單元)如圖1所示。
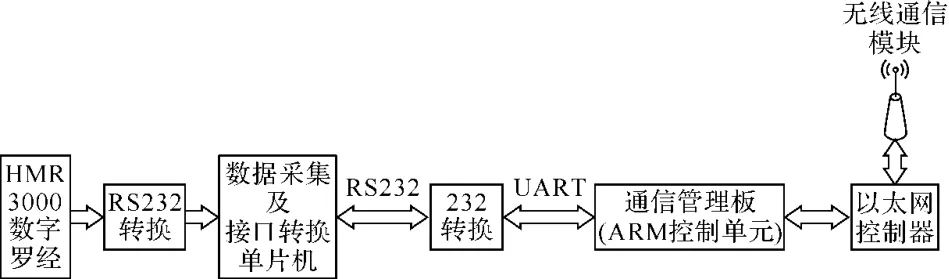
圖1 浮標系統的數字羅經系統結構
2.2 HMR3000功能模塊
HMR3000數字羅經集三個軸向的轉動角度測量功能于一體,由三軸磁阻傳感器和一個充有液體的兩軸傾斜傳感器組成,可以得到進行傾斜補償后的航向數據和姿態數據。該產品測量方位精度達0.5°,方位分辨率為0.1°;姿態精度達±0.4°,姿態測量分辨率為0.1°;最大姿態測量范圍±40°;工作溫度-20℃~+70℃;供電電壓為6~15V。HMR3000通信遵循NMEA(National Marine E-lectric Association.國家海軍電子協會)0183標準,可使用RS-232或RS-485接口。其數據ASCII碼字符為10位(1位起始位、8位數據位、1位停止位,無奇偶校驗位),傳輸波特率1200、2400、4800、9600、19200bit/s可選,更新模式在連續選通的狀態下,更新率為20Hz[5]。
2.3 器件選型
2.3.1 數字采集及接口轉換單片機
MSP430是TI公司近幾年推出的16位系列單片機,采用了最新低功耗技術。MSP430F169工作在1.8~3.6V電壓下,有正常工作模式(AM)和四種 低 功 耗 工 作 模 式 (LPM1、LPM2、LPM3、LPM4),并可在各種工作模式之間切換。此外,MSP430F169單片機集成了多通道12bit的A/D轉換、片內精密比較器、多個具有PWM功能的定時器、斜邊A/D轉換、片內USART、看門狗定時器、片內數控振蕩器(DCO)、大量的I/O端口以及大容量的片內存儲器,可以滿足絕大多數的應用需
要[6~8]。
MSP430F169的主要特性是:
·工作電壓:1.8V~3.6V。
·超低功耗:活動模式:280μA,at 1MHz,2.2V,待機模式:1.6μA。
·16位RISC結構,125ns指令周期。
·12位ADC采樣帶保持。
·串行通訊USART0、USART1接口。
·60KB+256Bflash存儲器2KB RAM。
2.3.2 RS232轉換
MSP430F169單片機輸出是TTL信號,方位姿態儀傳送的是RS232接口信號。RS232接口的電氣特性是任何一條信號線的電壓均為負邏輯關系。即:邏輯“1”:-5~-15V;邏輯“0”:+5~+15V。噪聲容限為2V。即要求接收器能識別低至+3V的信號作為邏輯“0”,高到-3V的信號作為邏輯“1”。可以看出RS232接口電壓和TTL接口電壓不匹配,不能直接連接,需一個接口轉化電路。需把TTL信號轉變成RS232信號再傳送[9],本系統選用轉換芯片是SP3232E。
TTL和RS232轉換芯片SP3232E內有一個高效的電荷泵,工作電壓為3.3V時只需0.1μF電容就可進行操作。電荷泵允許SP3232E在+3.3V~+5.0V內的電壓范圍內發送符合RS-232的信號。SP3232E是一個2驅動器/2接收器的器件。它包含一種低功耗關斷模式,該模式下器件的驅動器輸出和電荷泵被禁止。關斷狀態下,電源電流低于1μA。圖2是SP3232E典型應用電路圖。
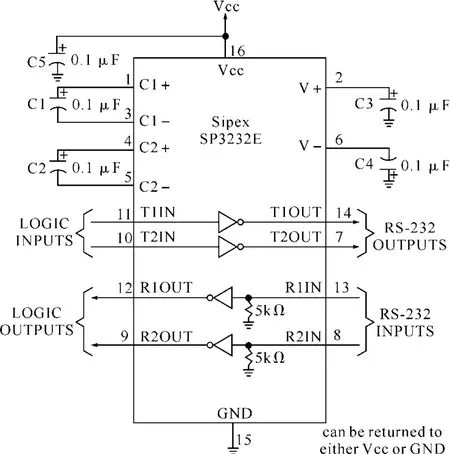
圖2 SP3232E典型應用電路圖
2.3.3 其它單元
上位機由一片ARM S3C2440A作為通信管理板的中心控制單元,系統選用三星公司的S3C2440A,它是ARM920T系列CPU,采用0.18μm工藝的CMOS設計,主頻最高可達266MHz,特別適用于低功耗場合。主要負責通信板的控制和數據傳輸(包括:矢量傳感器數據、羅經信息、深度信息、GPS數據等)。考慮到開發周期和可靠性等因素,選用核心開發板Nano2440。其自帶32MB SDRAM和64MB FLASH作為程序和數據存儲器;共有三個UART接口,一個通過232轉換芯片MAX3221轉為RS232標準與單片機相連,用于傳輸數字羅經和深度傳感器的數據。由于S3C2440A片上不帶以太網控制器,為了進行網絡通信,必須外接以太網控制芯片。設計中采用CS8900A作為以太網控制器。CS8900A主要為嵌入式應用系統、便攜式產品和某些適配卡等提供一種切實可行的以太網解決方案。2440A通過總線與CS8900A相連,拓展一個10M的以太網接口與無線通信模塊連接,完成浮標數據與基站的通信。
3 系統軟件設計
3.1 HMR3000的指令格式
HMR3000的串行通信是遵循NMEA0183標準制定的簡單、異步的ASCII協議,其發出或接收的每一條指令包含一個兩字符'hh'作為結尾,以保證發送數據的準確性;其輸出指令有六種格式(標準輸出格式為HDG、HDT、XDR,專用輸出格式為HPR、RCD、CCD三種格式),在矢量傳感器被動測向浮標中,數字羅經輸出量為用于測向誤差修正的航向數據,以及用于浮標姿態測量的俯仰數據、橫滾數據這三個測量值,因此,輸出指令格式選用HPR格式。系統所采用的控制指令及輸出指令為表1所示。
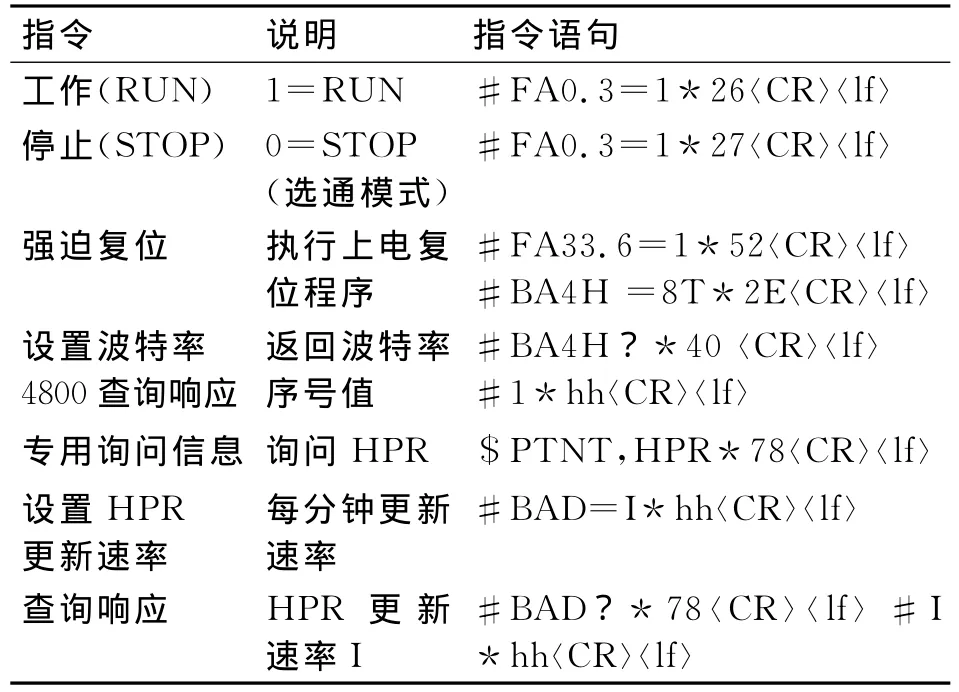
表1 HMR3000控制、輸出指令
3.2 系統程序流程
系統軟件設計包括兩方面,一是單片機對HMR3000串口數據的接收、整理、及存儲在單片機內部RAM中[10],另一是上位機對單片機的串口數據的讀取、與其它信息整合處理并發送,圖3和圖4為相關程序流程。
4 矢量測向誤差修正
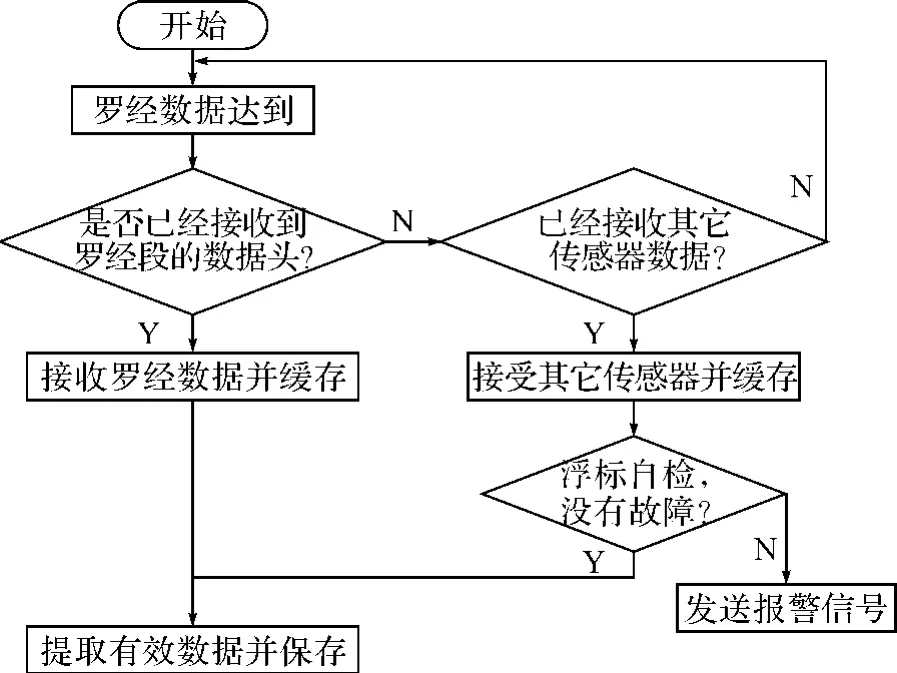
圖4 通信管理板接收羅經數據程序流程
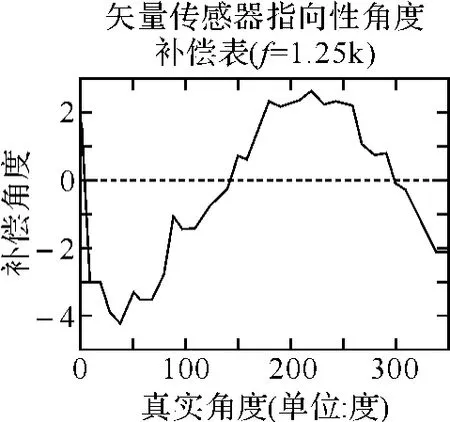
圖5 矢量傳感器測向工程誤差修正補償圖
為了消除矢量測向工程誤差,將矢量傳感器測得的目標方位依據數字羅經的數據對測向結果加以修正,給出目標真方位。系統進行測向誤差校準時,目標船載聲源低速繞測量浮標以較大半徑(≥1.5km)逆時針航行一周,目標聲源處剛性連接DGPS的數據作為目標真實方位坐標,數據處理基站對矢量測向數據、羅經航向數據以及目標的GPS數據結果進行處理分析,給出測量浮標矢量測向誤差角度補償值。圖5為系統校準時所獲矢量傳感器測向工程誤差修正補償圖,利用該圖對矢量傳感器的Vx,Vy通道的指向性進行誤差修正補償,圖6、圖7為補償前后的指向性對比圖,指向性有較為明顯的改善。
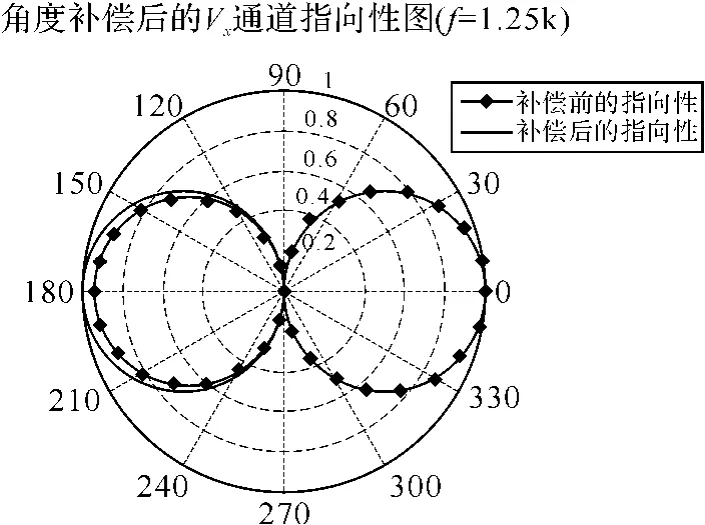
圖6 Vx通道角度補償前后的指向性對比圖
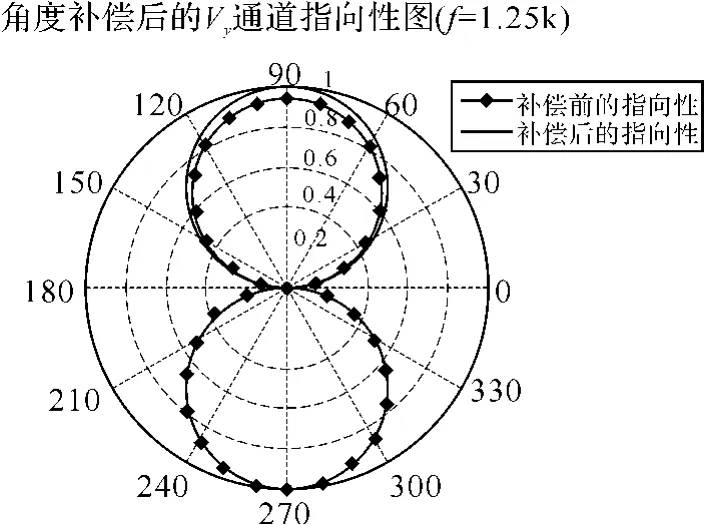
圖7 Vy通道角度補償前后的指向性對比圖
5 結語
在本文設計的矢量傳感器被動測向浮標中,采用HMR3000數字羅經與矢量傳感器封裝一體的集成方式,采用MSP430F149單片機作為下位機實現與數字羅經的串口通信,通過管理板將數字羅經、矢量傳感器等數據進行整合、壓縮,加密傳輸到岸基顯控系統進行處理,解決了矢量傳感器被動測向誤差修正問題。將矢量傳感器測得的目標方位經過數字羅經航向修正后,系統測向精度得到提高,整個系統具有精度高,功耗低,結構簡單,性能穩定的特點,滿足水聲測控裝備小型化需要,在水下目標探測、預警等領域具有較好的應用前景。
[1]王養柱,王強華,崔中興.新型數字羅經在空投魚雷內測記錄系統中的應用[J].傳感器技術,1999;18(3):43~51
[2]文方,黃錢飛.HMR3000在機器人姿態自控系統上的應用[J].自動化技術與應用,2010,29(6):27~32
[3]張鵬,楊坤德,劉艷,等.數字微波式遠程水聲數據采集系統設計[J].計算機測量與控制,2009,17(7):1421~1423
[4]陳皓生,徐軍.HMR3000數字羅盤在微型飛行器中的應用[J].傳感器技術,2001,20(9):44~46
[5]HMR 3000Digital Compass Module User's Guide,Rev.B 2001,3
[6]劉存根,李婧瑜,張銳,等.基于 MSP430F169的電纜管道牽引機器人系統設計[J].電子設計工程,2009,17(5):102~106
[7]林毓梁,張銳,王偉.基于 MSP430F169的深海環境數據采集系統設計[J].電子設計工程,2011,19(3):71~73
[8]姜曉,殳國華.基于 MSP430單片機的深水監測裝置[J].微計算機信息(嵌入式與 SOC),2009,25(8-2):69~70
[9]秦龍.MSP430單片機應用系統開發典型實例[M].北京:中國電力出版社,2005:60~64
[10]求是科技.單片機典型模塊設計實例導航[M].第2版.北京:人民郵電出版社,2008,7:166~183
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45