動(dòng)力調(diào)諧陀螺儀角位移測(cè)試中的數(shù)據(jù)處理技術(shù)*
2011-06-06 10:06:48陳維義
艦船電子工程 2011年12期
關(guān)鍵詞:系統(tǒng)
羅 云 陳維義 沈 遠(yuǎn)
(海軍工程大學(xué)兵器工程系1) 武漢 430033)(中國人民解放軍第四八零五工廠軍械修理廠2) 上海 200439)
1 引言
炮控系統(tǒng)是影響火炮武器系統(tǒng)精度的重要組成部分[1],因此在火炮武器系統(tǒng)定型試驗(yàn)和修理后驗(yàn)收試驗(yàn)中,炮控系統(tǒng)性能試驗(yàn)是非常重要的內(nèi)容,其中包括:火炮漂移速度測(cè)試、火炮穩(wěn)定精度測(cè)試、最大調(diào)炮速度測(cè)試、最小瞄準(zhǔn)速度測(cè)試、超回量測(cè)試等[2]。對(duì)這些指標(biāo)的測(cè)試,其核心是對(duì)火炮的角位移測(cè)試[3]。火炮的角位移獲取后,這些參數(shù)就可通過對(duì)其處理、計(jì)算來獲得。目前對(duì)炮控系統(tǒng)的性能參數(shù)測(cè)試的方法還是操作繁瑣、費(fèi)時(shí)費(fèi)力的手工靶板測(cè)試方法,自動(dòng)化程度不高,太過于落后,這對(duì)于武器系統(tǒng)的發(fā)展是不利的。文獻(xiàn)[3]介紹了CCD+坐標(biāo)靶、激光器+PSD光學(xué)測(cè)量靶、CCD+點(diǎn)光源、激光(光纖)陀螺、電測(cè)法五種角位移測(cè)試方法并比較了各自的優(yōu)劣,以光纖陀螺作為測(cè)角傳感器為首選方案。本文以此為參考,采用與光纖陀螺相似的動(dòng)力調(diào)諧陀螺為測(cè)角傳感器,研制了一套角位移測(cè)試系統(tǒng),并對(duì)數(shù)據(jù)處理技術(shù)作了詳細(xì)探討。
2 系統(tǒng)組成及工作原理
測(cè)試系統(tǒng)的原理框圖如圖1所示,分為下位機(jī)數(shù)據(jù)采集濾波發(fā)送模塊和上位機(jī)數(shù)據(jù)接收處理模塊。其中陀螺儀為西安航天長城的HT-A3高精度動(dòng)力調(diào)諧陀螺儀;下位機(jī)以ADI公司的ADSPBF532[4]為核心構(gòu)成的嵌入式最小系統(tǒng),外圍配置信號(hào)調(diào)理電路和A/D采集電路,對(duì)雙軸陀螺儀的角速度信號(hào)實(shí)時(shí)進(jìn)行調(diào)理、采集、濾波、信號(hào)處理與發(fā)送;上位機(jī)采用可靠性高的軍用筆記本,主要完成數(shù)據(jù)的接收、角速度的實(shí)時(shí)數(shù)值積分、角速度和角位移的實(shí)時(shí)曲線顯示、數(shù)據(jù)保存、離線數(shù)據(jù)分析等功能。
在角位移測(cè)量的基礎(chǔ)上,就可以完成各種火控性能參數(shù)的計(jì)算與分析。根據(jù)測(cè)試系統(tǒng)得到的各項(xiàng)結(jié)果與炮控系統(tǒng)的戰(zhàn)術(shù)技術(shù)指標(biāo)要求進(jìn)行對(duì)比,來評(píng)判炮控系統(tǒng)綜合性能是否合格。
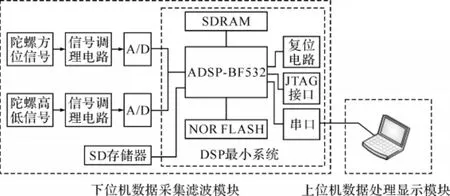
圖1 系統(tǒng)組成框圖
3 角位移測(cè)量原理及誤差分析
動(dòng)力調(diào)諧陀螺儀(DTG)是一種雙自由度的非液浮、干式彈性支撐、機(jī)電性的擾性陀螺儀[5~6],用于敏感慣性空間的角速度。把陀螺儀安裝在火炮身管上就能檢測(cè)出火炮在方位和高低向的運(yùn)動(dòng),其輸出為電壓信號(hào),利用比例因子,可以轉(zhuǎn)化為相應(yīng)的角速度。對(duì)角速度進(jìn)行實(shí)時(shí)梯形數(shù)值積分,就可以實(shí)時(shí)輸出火炮在方位和高低向所移動(dòng)的角位移。
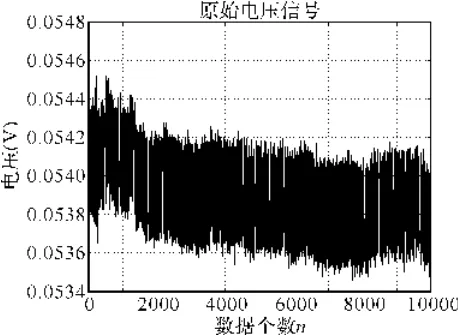
圖2 原始的電壓信號(hào)
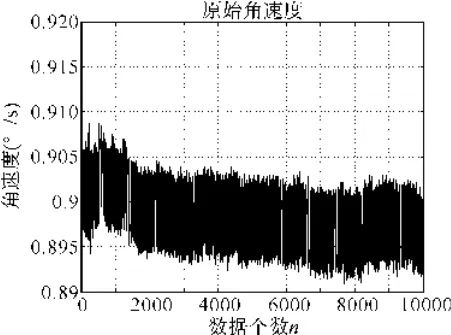
圖3 原始角速度信號(hào)
4 在線實(shí)時(shí)數(shù)據(jù)處理方法
處理的方法要根據(jù)具體的應(yīng)用來定。如果只是離線處理,由于樣本數(shù)據(jù)已知,則可以對(duì)樣本數(shù)據(jù)求均值后,利用樣本數(shù)據(jù)減去均值就能消除其角速度的零點(diǎn)偏移對(duì)角位移的影響。如果是在線實(shí)時(shí)處理,則樣本數(shù)據(jù)未知,無法求其均值,因此就不能利用離線處理的方法。下面就在線實(shí)時(shí)處理進(jìn)行討論其相關(guān)方法。
4.1 一次平均法求零點(diǎn)
首先對(duì)先前所采集的數(shù)據(jù)進(jìn)行統(tǒng)計(jì)求均值得相應(yīng)的角速度零點(diǎn),然后后續(xù)的角速度零點(diǎn)減去一次平均法求到的零點(diǎn),再對(duì)兩者之差進(jìn)行數(shù)值積分。相比直接對(duì)角速度信號(hào)直接數(shù)值積分,該法能大大減小角速度零點(diǎn)在數(shù)值積分時(shí)對(duì)角位移的影響。然而,隨著積分時(shí)間的增加,由于角速度零點(diǎn)之差使積分帶來的角位移仍會(huì)越來越大。圖4的虛線就是采用一次均值求零點(diǎn)的數(shù)值積分所得到的角位移,從圖中可知,當(dāng)時(shí)間為990s時(shí),一次均值求零點(diǎn)的數(shù)值積分所得到的角位移漂移為了-5.5539°,如果積分時(shí)間更長,則角位移的漂移也會(huì)更大,其精度不能滿足本系統(tǒng)的需求,必須尋找其它的數(shù)據(jù)處理方法。
4.2 零點(diǎn)漸變算法[9~10]
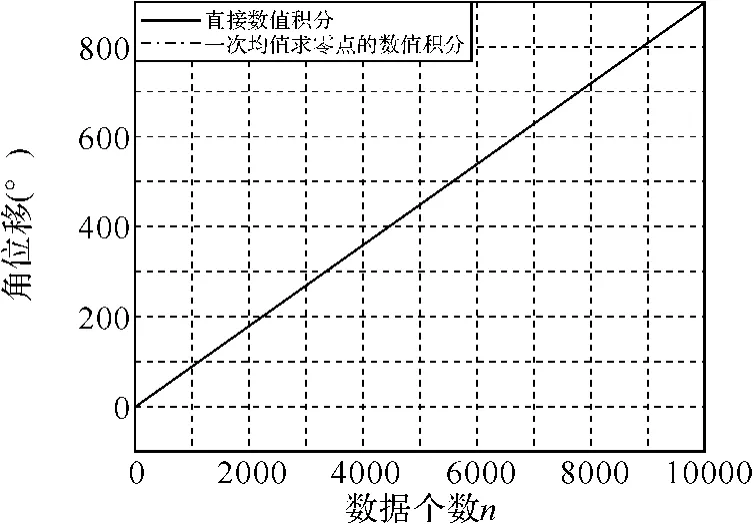
圖4 陀螺儀靜止時(shí)零點(diǎn)積分漂移曲線1
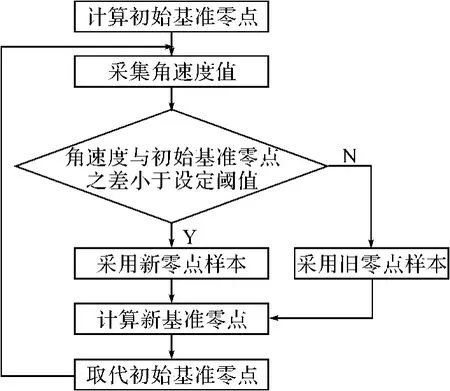
圖5 零點(diǎn)漸變算法的流程框圖
該算法的基本思想是:用多次平均法代替一次平均法求零點(diǎn)。實(shí)現(xiàn)的流程框圖如圖5所示。首先在陀螺靜止時(shí)連續(xù)采集8個(gè)樣本值作為初始基準(zhǔn)零點(diǎn),然后再次采集角速度值,并與初始基準(zhǔn)零點(diǎn)進(jìn)行比較,如果差值小于某個(gè)閾值,則說明陀螺仍處于靜止?fàn)顟B(tài),此時(shí)采用新的零點(diǎn)樣本,否則仍采用舊零點(diǎn)樣本,在此基礎(chǔ)上計(jì)算新的基準(zhǔn)零點(diǎn),并取代初始基準(zhǔn)零點(diǎn)。本系統(tǒng)設(shè)定閾值為0.0133°/s。對(duì)該算法進(jìn)行仿真,并與一次均值求零點(diǎn)進(jìn)行比較,其結(jié)果如圖6所示,實(shí)線為一次均值求零點(diǎn)的數(shù)值積分所得到的角位移,而虛線為零點(diǎn)漸變算法的數(shù)值積分所到的角位移。從圖中可知,當(dāng)積分時(shí)間為990s時(shí),前者的漂移為-5.5539°,后者的漂移為0.0061°。從零點(diǎn)漸變算法的數(shù)值積分漂移曲線放大圖可以看出其變化趨勢(shì)為:隨著時(shí)間的增加,其漂移的絕對(duì)值會(huì)逐漸增大。因此,雖然后者的值較小,在短時(shí)間內(nèi)滿足系統(tǒng)要求,但其變化趨勢(shì)不能忽視,因此提出了改進(jìn)零點(diǎn)漸變算法。
4.3 改進(jìn)零點(diǎn)漸變算法
改進(jìn)零點(diǎn)漸變算法的目的是使零點(diǎn)積分漂移絕對(duì)值不隨著時(shí)間的增加而增加,而是在零附近來回波動(dòng)。基于該目的,給出了實(shí)現(xiàn)的基本方法:對(duì)角速度零點(diǎn)進(jìn)行判斷是否在上文提到的閾值內(nèi),如果是則認(rèn)為陀螺靜止,否則認(rèn)為陀螺在運(yùn)動(dòng)。陀螺靜止時(shí)使角速度零點(diǎn)樣本交替改變符號(hào)來避免角速度恒為正或負(fù),從而使零點(diǎn)積分漂移不會(huì)隨著時(shí)間而單向增大。對(duì)該算法進(jìn)行仿真,并與零點(diǎn)漸變算法進(jìn)行比較,其結(jié)果如圖7所示,實(shí)線為零點(diǎn)漸變算法的數(shù)值積分所到的角位移,虛線為改進(jìn)零點(diǎn)漸變算法的數(shù)值積分所得到的角位移。從圖中可知,隨著積分時(shí)間增加,后者不會(huì)單向增加,而是在零附近波動(dòng),從而使得精度大大提高。當(dāng)積分時(shí)間為990s時(shí),前者的漂移為0.0061°,后者的漂移為0.0004°。
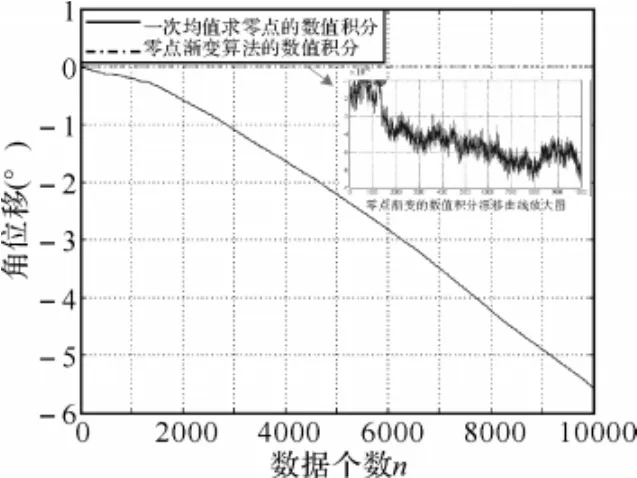
圖6 陀螺儀靜止時(shí)零點(diǎn)積分漂移曲線2
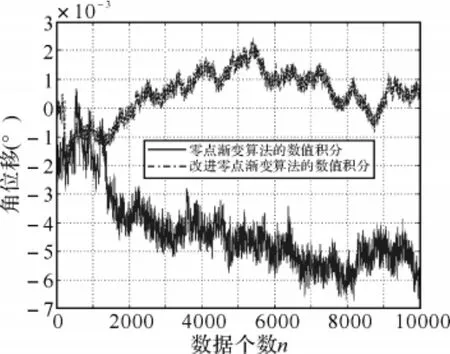
圖7 陀螺儀靜止時(shí)零點(diǎn)積分漂移曲線3
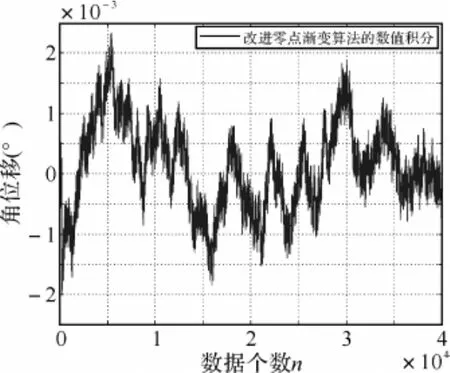
圖8 陀螺儀靜止時(shí)零點(diǎn)積分漂移曲線4
5 實(shí)驗(yàn)結(jié)果分析
靜態(tài)實(shí)驗(yàn)是指陀螺靜止時(shí)測(cè)試角位移測(cè)試系統(tǒng)的輸出,其測(cè)試結(jié)果如圖8所示。從圖中可以看出,角位移漂移在零附近波動(dòng),在3991s時(shí),實(shí)際的角位移漂移為0.0004°。可以看出,陀螺長時(shí)間內(nèi)靜止時(shí)角位移漂移也非常小,完全滿足系統(tǒng)的精度要求。
動(dòng)態(tài)實(shí)驗(yàn)是指陀螺儀運(yùn)動(dòng)時(shí)測(cè)試角位移測(cè)試系統(tǒng)的輸出。將陀螺儀固定在高精度雙軸轉(zhuǎn)臺(tái)2ST-520上,使轉(zhuǎn)臺(tái)在高低和方位運(yùn)動(dòng),同時(shí)記錄角位移測(cè)試系統(tǒng)所測(cè)的角位移和轉(zhuǎn)臺(tái)所測(cè)試的相對(duì)角位移。兩者對(duì)比就可以得出角位移測(cè)試系統(tǒng)的測(cè)角精度。表1給出了在方位向角位移測(cè)試系統(tǒng)與轉(zhuǎn)臺(tái)的測(cè)試結(jié)果,由表中的數(shù)據(jù)可以得出,系統(tǒng)的測(cè)量精度在0.48%以內(nèi)。考慮本系統(tǒng)主要是用于小角度測(cè)量,故精度完全滿足要求。
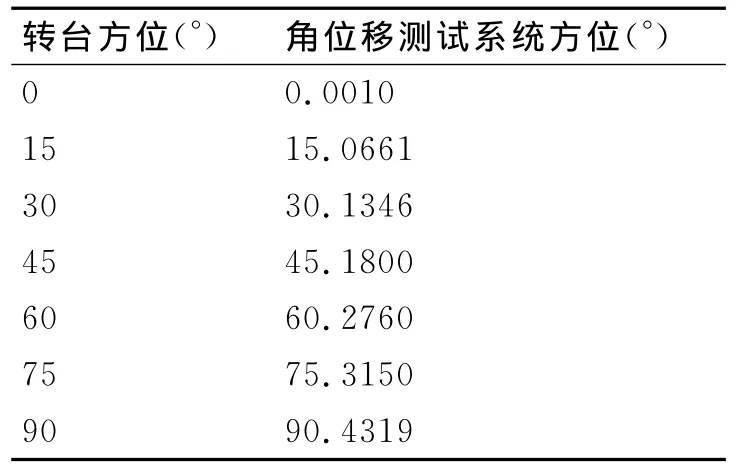
表1 角位移測(cè)試系統(tǒng)與轉(zhuǎn)臺(tái)的測(cè)試結(jié)果
6 結(jié)語
在炮控系統(tǒng)性能參數(shù)測(cè)試中,對(duì)角位移的測(cè)試是關(guān)鍵,本文首先分析了基于動(dòng)力調(diào)諧陀螺儀的角位移測(cè)量原理,針對(duì)陀螺靜止時(shí)角速度零點(diǎn)積分漂移大的問題,提出了改進(jìn)零點(diǎn)漸變算法,使系統(tǒng)的精度得以提高。該測(cè)試系統(tǒng)具有通用性好、使用簡單、測(cè)角精度高等優(yōu)點(diǎn),不僅可以用于坦克炮控系統(tǒng)性能參數(shù)測(cè)試,而且還可以用于艦載炮控系統(tǒng)的測(cè)試,因而具有比較好的推廣應(yīng)用前景。
[1]臧克茂,馬曉軍,李長兵.現(xiàn)代坦克炮控系統(tǒng)[M].北京:國防工業(yè)出版社,2003:5~11
[2]王春忠,楊忠國,榮明.基于陀螺儀的坦克炮控穩(wěn)定精度檢測(cè)儀設(shè)計(jì)[J].傳感器與微系統(tǒng),2009,28(1):85~87
[3]郝赤,趙克定,許宏光,等.炮控系統(tǒng)性能試驗(yàn)中角位移量的幾種測(cè)量方法[J].火力與指揮控制,2004(12):103~106
[4]Analog Devices.Blackfin Embedded Processer,ADSPBF531/ADSP-BF532/ADSP-BF533[DB/OL].[2011.01].www.analog.com
[5]鄒達(dá)明.動(dòng)力調(diào)諧陀螺儀漂移測(cè)試與建模研究[D].哈爾濱工程大學(xué)碩士論文,2004,3:1~3
[6]范世珣.動(dòng)力調(diào)諧陀螺儀的數(shù)字換技術(shù)研究[D].國防科學(xué)技術(shù)大學(xué)碩士論文,2006,11:1~2
[7]Analog Devices.16-Bit,1LSB,1MSPS Differential ADC,AD7677[EB/OL].[2002.07].www.analog.com
[8]羅云,孫春生,王昌平.基于ADuC834單片機(jī)的高精度電壓監(jiān)測(cè)系統(tǒng)[J].儀表技術(shù)與傳感器,2007(10):50~52
[9]蔡軍.基于光纖陀螺儀的軌道不平順檢測(cè)系統(tǒng)的研制[D].南昌大學(xué)碩士論文,2007,6:40~43
[10]朱洪濤,蔡軍,王志勇.基于光纖陀螺儀的軌道不平順檢測(cè)系統(tǒng)[J].微計(jì)算機(jī)信息,2007(23):268~269
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32